|
�ڄ����\���^���У������ⲻ�ˌ��F���ӡ���ͣ�ȹ��ܣ�����ͣ�O�þ��������^��ֹͣ
�ڮ�ǰ�\�ӵĠ�B���ٻ֏͕r�������^�m�\�С�
������Ҫ��
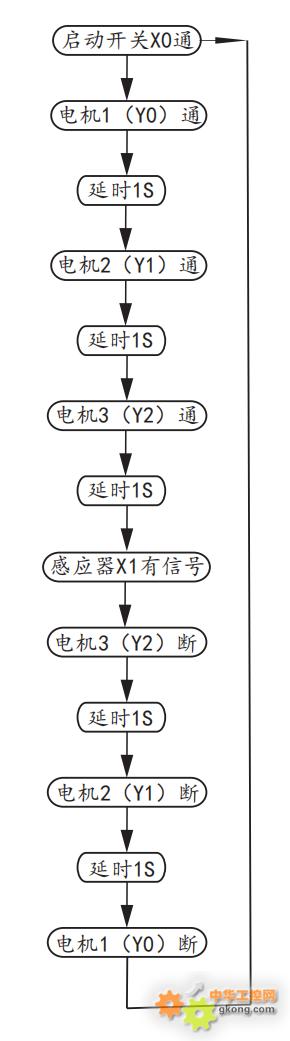
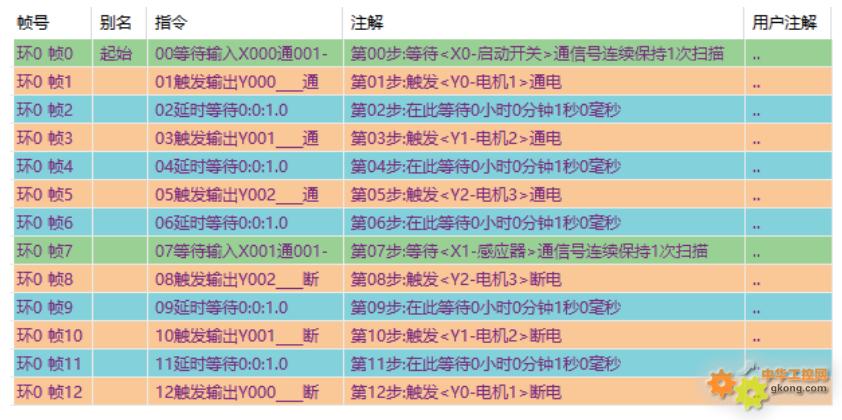
�������_�P�����i�_�P����1��2��3̖늙C��������΄�����늙C1�������ӕr1s��
늙C2���������ӕr1s��늙C3�������ӕr1s�Б���X1����̖�r��늙C����3��2��1���
������ֹͣ������ÿ�������g��1s��
��ͣ�r������ֹͣ�ڮ�ǰ��B��ݔ����B���Ա�����
������������
�������_�P������һ���ȴ�ݔ����̖�����ӵȴ�ݔ��X0��늙C���������|�lݔ��
�ˣ�늙C���������|�lݔ��ͨ��늙Cֹͣ�����|�lݔ���࣬�g���r�g�������ӕr�ȴ�ָ�
���ӕ�ͣ�_�P����ͣ�_�P����������̖�����i�_�P��ͨ��˲�g���r�����Ƅ�������ֹͣ
���������ڭh��ֹͣ��B������ͣ�_�P���½�����̖�����i�_�P�����˲�g�������Ƅ�����
���\�����������ڭh���\�Р�B��������O���ڽM��߉�Ќ��F��
���������̈D��
���Մ���������ÿһ����������һ��ָ������������̈Dһ��һ����������ÿ��
ָ�������̈D�ķ�ʽ�B��������
���Ąe����
��ܛ���e��̎����������Ҫ�õ��Ķ˿��M�Єe���ģ�
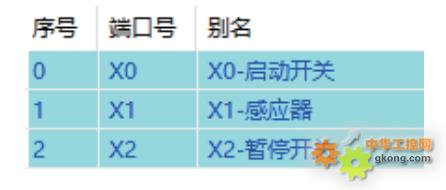
ݔ��˄e���ģ�X0�������_�P��X1���Б�����X2����ͣ�_�P��
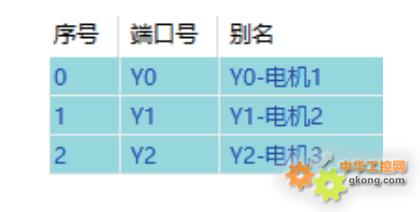
ݔ���˄e���ģ�Y0��늙C1��Y1��늙C2��Y2:늙C3��
��������
�ڕr��h0��ֱ���Æ����_�P������늙C��ͨ�ࡣ
ע�����|�����ό��F�������_�P���I��ֻ��Ҫ���ȴ�ݔ��“X��”��
���o����־“M”�Ϳ����ˣ����ӵȴ��o��ָ���
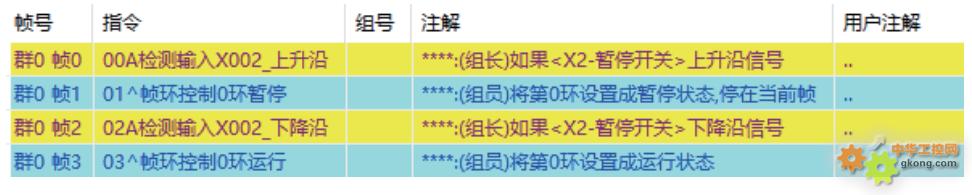
�ڽM��߉����ͣ���֞�ɽM��һ�M�Ǖ�ͣ����̖�r�Ą�������һ�M�Ǖ�ͣ
�_�P�]��̖�r�Ą�������ͣ�_�PX2����������̖�r���ൽͨ��һ˲�g���������������
�h-�r��h0��ֹͣ��������ͣ�_�PX2���½�����̖�r��ͨ�����һ˲�g�������������
�ڭh-�r��h0���^�m�\�С�
�������{ԇ��
�����еij������֮���҂��Ϳ��Ԍ�����ͨ�^�����°l��PLC�У������{ԇ
�ЎN��ʽ��
1�������ھ���ܛ�����M�г����{ԇ���ڲˆΙ��е��{ԇ���У����_“�ھ��{ԇ�h”��
�x���°l����Ķ˿ڣ������ھ��{ԇ��
2�������|����ܛ���ό��F�ھ�ģ�M���M�г����{ԇ��
|