|
ҕ�l�̳̣���ҕ�l�̳̣��\�ӿ�����ZHMI�M�B���̺���һ��
���������҂���W��һ�£��\�ӿ�������ZHMI�M�B���̺��顣������Ҫ�ĮaƷ�������������B���|����ʹ�á�HMI���̷����Լ��M�Bʾ��������ķ�����v�⡣
����01�aƷ����
��������ZMC306X�������B��ZHD400X�|������
���������������������D��
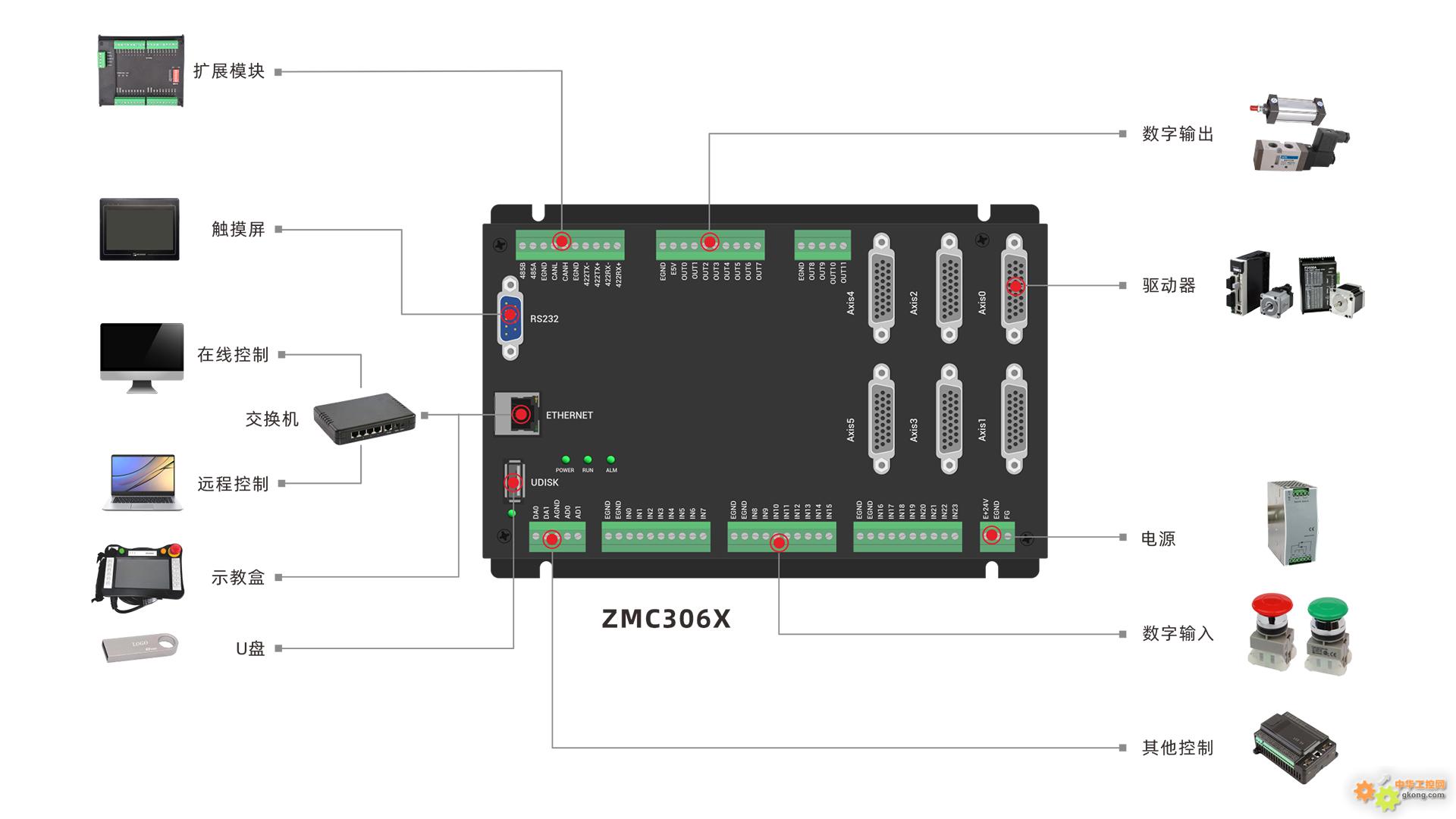
����(һ)ZMC306XӲ����B
����ZMC306Xϵ�п��������w��6���}�_�S����ͨ�^CAN�����Uչ�}�_�S��֧�ֶ��_12�Sֱ�����a������A�����a�����g�A�����������a�����݆������X݆��ͬ�����S��̓�M�S�O�õ�;���Ã����ľW�jͨӍ�f�h���Ԍ��F���r���\�ӿ��ơ�
����ͨӍ�ӿڰ���RS232��RS485��RS422����̫�W��U�P��CAN��
������������ݔ���0-1֧���i�湦�ܣ�ݔ����0-1֧��PWM����;���펧��·ģ�M��ݔ��̓�·ģ�M��ݔ���ӿڣ�12λ���ȣ�늉�����0-10V��
����֧�����\�Ӽ��gXPLC�Ĺ��ܣ�ʹ��ZDevelopܛ����HMI�����_�l�M�B������ͨ�^�W�j�����M�B�@ʾ��
����
����(��)ZHD400X
����ZHD400X��һ��W�j�@ʾ���|����ʾ�̺У�ʾ�̺б�횺�֧��ZHMI���ܵĿ��������ʹ�ã��|�����ĽM�B�����_�lʹ��ZDevelop��HMI�����_�l��ʽ�������ڿ������С�
����ʾ�̺Ў���һ��USB�ڣ�һ��U�P���L�ڣ�ʹ��24Vֱ���Դ���(��USB���)������800*480�ֱ��ʵ�����@ʾ�������펧18�����I���伱ͣ�_�P��
����ZHD400X֧���|�����������I���|�����ʹ�á�
����
������Ļ߅�ϵ��������I�ľ��aҎ�t��Ҋ��ZHD400X�ֳֺ��փԡ��f�������I���r��ʾ�̺��Ԅ���������l���������I��������������ԙz�y���������I�������Ҫʹ��̓�M���I����Ҫ�ڽM�B����ʹ�ð��I�D�Q����ZDevelop���И˜�400X�İ��I�D�Q��,���Ը������w��r����Ĥ�İ��I�D�Q����
����02 �������B���|����ʹ��
�����|������һ���W����ʹ�þW���B�ӵ���������EtherNET�W�ڣ��W��ˮ���^߅���������������ֱ���ʾ�̺��Դ���ͼ�ͣ��̖�����tɫ��24V�Դ���O����ɫ��24V�Դؓ�O����ɫ�鼱ͣ��̖����
�����|�����Ϳ����������Դ�ɹ���һ����
����
����ʹ�ò��E��
����1.��ʹ��ZDevelopܛ������HMI�����B�ӿ����������������d��ROM��늱��棬�Ϳ��Ԕ��_��������ZDevelop���B�ӡ�Ȼ��o�|������늡�
����2.ֱ��ʹ����l���B�Ӿ���ZHD400X�ӵ��������ľW���ϣ�Ȼ���������Ă��ǣ�����Z������c�����B�m2�Σ�������Ļ���������ԏ����O�ô��ڣ������M���|��У����������IP�ĵȡ�
����
����3.�O�ô������£��ڏ����Ĵ������Ԅӫ@ȡ����ǰ���B�Ŀ�����IP�ĵ�ַ���_�JIP�o�`���c��Connect�����B��ʹ�ã��˕r�|�����@ʾ��ʼ�������ڵă��ݡ�
����
����4.���]���|�������Ɍ�HMI�������d������������XPLC screenƽ�_���档
����
�����B�ӷ��������d֮���c��“�@ʾ”���o���ɏ���������档
����XPLC screen�@ʾЧ����
����
����03 HMI���̷���
����HMI�M�B����һ���Basic��Ͼ��̣���HMIҪ�{�õļĴ��������P������������Basic�ȣ���HMI�ļ���ͨ�^ϵ�y�O�û�Ԫ���{��Basic���������{�õ�Basic���������ȫ�ֵ�SUB�^�̡�
����ע��Ҫ�\�еĽM�B�ļ�һ��Ҫ�O�ú��Ԅ��\���΄�̖��
����
�������̅������̣�
����1.�½��Ŀ��HMI�ļ���HMI�ļ�����֮�������“HMIϵ�y�O��”���ڣ��O�÷ֱ��ʡ������洰�ڵȻ�����Ϣ;
����2.���������½����ڣ��O�ô��ڌ���;
����3.�ڸ������ڃ����ӽM�BԪ�����O��Ԫ������;���ڵ��{�ÿ���Ԫ���������O�ã���ֱ�Ӵ��_���P�]ָ�����ڣ����{��Basic����ʹ��ָ����_���P�]ָ������;
����4.��Ҫ�{��Basic�����r�ڹ����Ŀ���½�Basic�ļ������M�BԪ��Ҫ�{�õĺ���������ȫ�ֵ�SUB������
����5.�������ָ���ļ��Ԅ��\���΄�̖�����d������������������B���|�����@ʾ����XPLC screen�@ʾ��
����(һ)�½�HMI�ļ�
�������Ƚ��������Ŀ֮���½�HMI�ļ���Ĭ�J�½���HMI����������ͬ�L����I�P����6��7��8��һ����������10��Ĭ�J�@��10̖���������|�����������棬�ɸ���Ĭ�J������(��Ҋ���HMIϵ�y�O��)��
����
�����{��ܛ�I�P����ݔ�딵����
�����c����ݔ�딵���ĽM�BԪ�����ܴ��_ܛ�I�P���ڣ����D����ܛ�I�P����ݔ�딵ֵ֮���c��Enter���漴��׃��������
����
����(��)HMIϵ�y�O��
�����ھ��M�B����֮ǰ���x��HMI�ļ�������Ҫ���_�ˆΙ�“��”→“HMIϵ�y�O��”���_���´��ڡ�
����
���������M�B����Ҫ���õ�ʾ�̺еijߴ磬�O�ú�ˮƽ�ֱ��ʺʹ�ֱ�ֱ���(���Ϲ�10̖���ڷ����С)���x����ʼ��������(���|�����@ʾ�ij�ʼ����)����ʼ�����������ں����x��Basic�ホ���õ�GLOBALȫ�ֶ��x��SUB�Ӻ�����
������ʼ������HMI��늺��\��һ�Σ����ں�������ѭ�h���衣
����
����(��)�M�B����
�����M�B�@ʾ�����һ���������ڞ�״��ڣ������������ڵı������棬Ԫ����Ҫ���������@ʾ��һ���M�B�ļ��¿��½�������ͬ��͵Ĵ��ڡ�
�����½����ڣ��ˆΙ�“Ԫ��”→“�½�����”���_���´��ڣ�ݔ�봰��̖�ʹ������Q��_�J��ע�ⴰ��̖��Ҫ�؏͡�
�������ڵČ��Ժͳߴ�λ�õ���Ϣ����Ҫ���_����“����”�ġ�
����
�����M�Bҕ�D���@ʾȫ�����ں������µ�Ԫ����Ԫ���ڴ��������ӣ����ڻ�Ԫ���Č�����“����”�����ġ�
�����c���M�B���ڻ�Ԫ�����ܴ��_���Դ��ڡ�
����
����������Ͱ�����N����������(Base Window)��ܛ�I�P����(Keyboard Window)����������(Pop Window)���ˆδ���(Menu Window)����픴���(Top Window)��
����1.��������(Base Window)���M�B�@ʾ�����һ���������ڞ�״��ڡ�ֻ���@ʾһ���������ڡ���������ͨ�^�����Ԫ�������M���ГQ�������P�]��
����2.ܛ�I�P����(Keyboard Window)��������Ҫݔ�딵ֵ����r��Ԫ����ֵ�@ʾvalue��Ԫ�����ԃ��x��ܛ���P���ڣ��½���HMI�ļ����������Nܛ�I�P���ڿɹ��x��
����3.��������(Pop Window)��Pop������Ҫͨ�^�����Ԫ�������P�]��Pop���ڴ��_��Pop�^�����Ԫ���Կ����|�l����Pop���ڌ������O�ÉŔ��ֻ�ܲ�����ǰPop���ڃȵ�Ԫ�����ГQ�������ں�Pop/Menu�����P�]
����4.�ˆδ���(Menu Window)��Menu���ڌ���Pop���ڣ������{�ú�����֮ͬ̎��Menu���ڏ����@�ò��������ޣ��˕rֻ�܌�Menu�����M�в��������c������Menu���څ^��r��Menu���ڌ��P�]��
����5.��픴���(Top Window):��������ǰ���@ʾ�Ĵ��ڣ�һ���һ��С���ڣ������Á팍�F���ߗl�ȡ��ГQ�������ڕr��Top�����ԕ��@ʾ����ǰ�ˣ������P�]��
�������ڴ��_���P�]�ķ���
����1.�����IBUTTON�{��Basic�����ڳ���Ⱦ���HMI_SHOWWINDOW�@ʾ���ڣ�HMI_BASEWINDOW�@ʾ�������ڣ�HMI_CLOSEWINDOW()�P�]���ڣ��������ڲ�֧���P�]��
����
����2.�����I����-�����x���P�]���@ʾ���ڡ�
�����x��“Ԫ��”→“λԪ��”→“�����I”���½�һ�������I���o�����_Ԫ���Č��Դ��ڣ��ҵ�“����”�����б���
����
���������x����_3�N�������base/top/pop������menu���ڌ���Pop Window��͡�
����
�����x��Close���P�]��ǰ���ڻ�ָ���P�]����̖��
����
����(��)���ӽM�BԪ��
����HMI��������Ĵ��ں�Ԫ���ڲˆΙ�“Ԫ��”���x���ں�Ԫ����Ԕ��ʹ���f����ҊHMI�����փԡ�
����
������“Ԫ��”�ˆΙ�����Ԫ����Ԫ�������ڽM�B���ڳߴ緶���ȣ����_Ԫ�������O��Ԫ�����P���������D����קԪ���x����õ�λ�ã����ڌ��Եijߴ��λ�Ù��O�á�
����
������ͬ��Ԫ�����ԕ��в����Ҳ�й��ԣ�һ����Ҫ�{��Basic�������еĈ����x��“�����IButton”����Ҫ���ƼĴ�����B�r�x��“λԪ��”��“��Ԫ��”���@ʾ�ı�ʹ��“�ַ��@ʾ”��ʹ��“ֵ�@ʾ”Ԫ���{��ܛ�I�P�����������|������ݔ�딵ֵ��
����
����1.Ԫ��ͨ�Ì���
����
����2.�Ĵ���
�����ֵ�Ԫ��������“�Ĵ������”�@һ���ԣ��Á��c��Ĵ�����������ϵ���Ĵ������xϵ�y�Ԏ��ļĴ������Զ��x׃�������M��
�������D��λ��B�ГQԪ������λ�Ĵ���M10��ֵ��1��ͬ�r�@ʾ��ʽ�ı�0;���_M10��0��ͬ�r�@ʾ��ʽ�ı�1��
����
����
����3.����
����ͨ�^���������б�����ͬ��Ԫ�����x��Ą������������Ҋ���x���_���P�]���ڡ��{��Basic��ȫ��SUB�����ȣ�Ĭ�J������Ч��
�������D�������I�Ą����x���{�ú����������x��onrun()��
����
����
����
����04�M�Bʾ������
����
���������̞���S�\�����̣������ɂ��ļ���Basic�ij�����HMI�{�È��С�
����
����
����
����HMI�M�B���棺
�������x��Ҫ�\�ӵ��S̖��X�S��Y�S�����x���S̖�o���\�ӣ����x���\�ӷ�����\��ģʽ�����x���\��ģʽ���ӣ�߀��Ҫ�O�ô�Ӿ��x��
�����Ϸ��Ļ����S�������Զ��x�O�û����Ĭ�Jֵ���{��ܛ�I�P�����Զ��xݔ��ֵ�������O����ɺ��c���\���S�\���������\�е��ٶ�SPEED���Sλ��DPOS�ֱ��@ȡ��ֵ�@ʾԪ��1��2�ӑB�@ʾ��
��������ֹͣ���o����ֹͣ��ǰ�\�ӣ�����λ�����㰴�o����DPOS��
����
����
����
����Basic������棺
����
����
����
����Basic����
����global sub main_int() 'HMI��ʼ������
����global str(20) '�S��B��ֵ�@ʾԪ��11�{��
����str="δ�x��" 'ֵ�@ʾԪ��11�@ʾ���ݣ�δ�x��
����global state(20) '�\��B
����state="ֹͣ"
����global axisnum '�S�x��
����axisnum=0 '1 X�S,2 Y�S....
����intaxis() '��ʼ���S������Ĭ�Jֵ
����dpos=0
����units = table(0) 'HMI�����ք��O��ֵ��������table
����lspeed = table(1)
����speed = table(2)
����accel = table(3)
����decel = table(4)
����sramp = table(5)
����table(10)=0 '��ǰλ�ã�ֵ�@ʾԪ��1�{��
����table(11)=0 '��ǰ�ٶȣ�ֵ�@ʾԪ��2�{��
����table(15)=0 '��Ӿ��x��ֵ�@ʾԪ��28�{��
����RAPIDSTOP(2)
����end sub
����global sub main_scan() 'HMI���ں���
����slcaxis() '�x���S
����if idle=-1 then 'ֻ����ֹͣ��B���S��������Ч
���� setaxis()
����endif
����table(10)=DPOS '�ӑB�@ȡ�@ʾ
����table(11)=MSPEED
����if idle=-1 then
�� ��state="ֹͣ"
����endif
����end sub
����sub intaxis() '�S������ʼ��
����table(0)=10 'units �}�_����
����table(1)=10 'lspeed ��ʼ�ٶ�
����table(2)=100 'speed �\���ٶ�
����table(3)=1000 'accel ���ٶ�
����table(4)=1000 'decel �p�ٶ�
����table(5)=10 'sramp s�����r�g
����end sub
����sub setaxis() '�S�����O��
����units = table(0)
����lspeed = table(1)
����speed = table(2)
����accel = table(3)
����decel = table(4)
����sramp = table(5)
����end sub
����global sub slcaxis() '�S�x��
����if MODBUS_BIT(0)=1 then 'modbus_bit(0)����hmi�����X�S�x���o
����cancel(2) axis(1) '���Q�x����S�r��ֹͣY�Saxis1���\��
����str="X�S" '�@ʾ���ݞ飺X�S
����axisnum=1
����base(0) '�x��X�S
����elseif MODBUS_BIT(1)=1 then 'modbus_bit(1)����hmi�����Y�S�x���o
����cancel(2) axis(0) '���Q�x����S�r��ֹͣX�SAxis0���\��
����str="Y�S" '�@ʾ���ݞ飺Y�S
����axisnum=2
����base(1) '�x��Y�S
����endif
����end sub
����global sub onrun() '�\�ӹ����I�{��
����if axisnum=0 then
�� ��return 'axisnum=0δ�x���S̖
����elseif MODBUS_BIT(20)=0 then 'modbus_bit(20)����hmi������\��ģʽ���o������0����m
����if MODBUS_BIT(10)=0 then 'modbus_bit(10)����hmi����ķ����x���o
���� vmove(1)
����elseif MODBUS_BIT(10)=1 then
���� VMOVE(-1)
����endif
����elseif MODBUS_BIT(20)=1 then '�\��ģʽ������1����
���� move(table(15)) '��Ӿ��xָ����ֵ�@ʾԪ��28
����endif
����if idle=0 then
���� state="�\��"
����endif
����end sub
����global sub onstop() 'ֹͣ�����I�{��
����state="ֹͣ"
����RAPIDSTOP(2)
����end sub
����global sub clear_dpos() 'λ�����㹦���I�{��
���� dpos=0
����end sub
�������������T|ƪ��ʮһ�����\�Ӽ��g�\�ӿ�����ZHMI�M�B���̺���һ�����v���@������W��ҕ�l���D��Ԕ��Ո�Pע�҂��Ĺ���̖“���\��С����”��
�������������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
|

