|
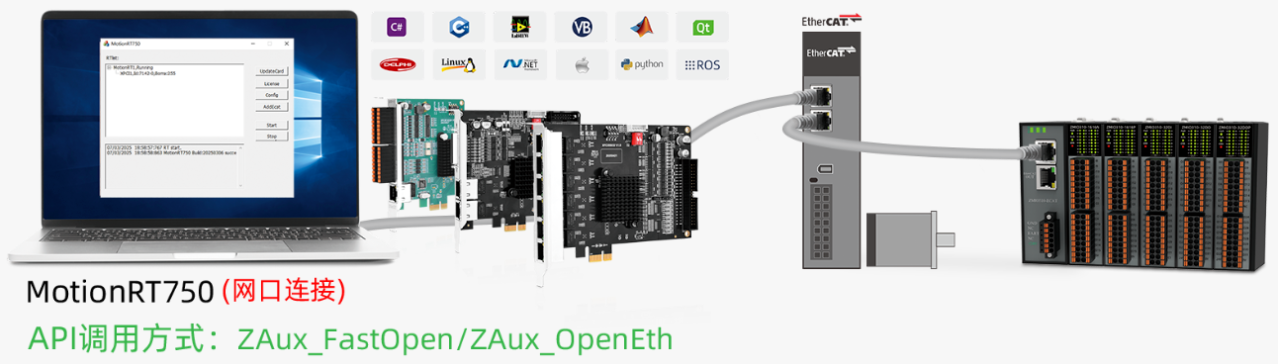
MotionRT750�����\(y��n)�Ӽ��g(sh��)���������е�x86�ܘ�(g��u)Windowsϵ�y(t��ng)��Linuxϵ�y(t��ng)�ª�(d��)ռ�_��CPU�ď�(qi��ng)��(sh��)�r(sh��)�\(y��n)�ӿ��ƃ�(n��i)�ˡ�
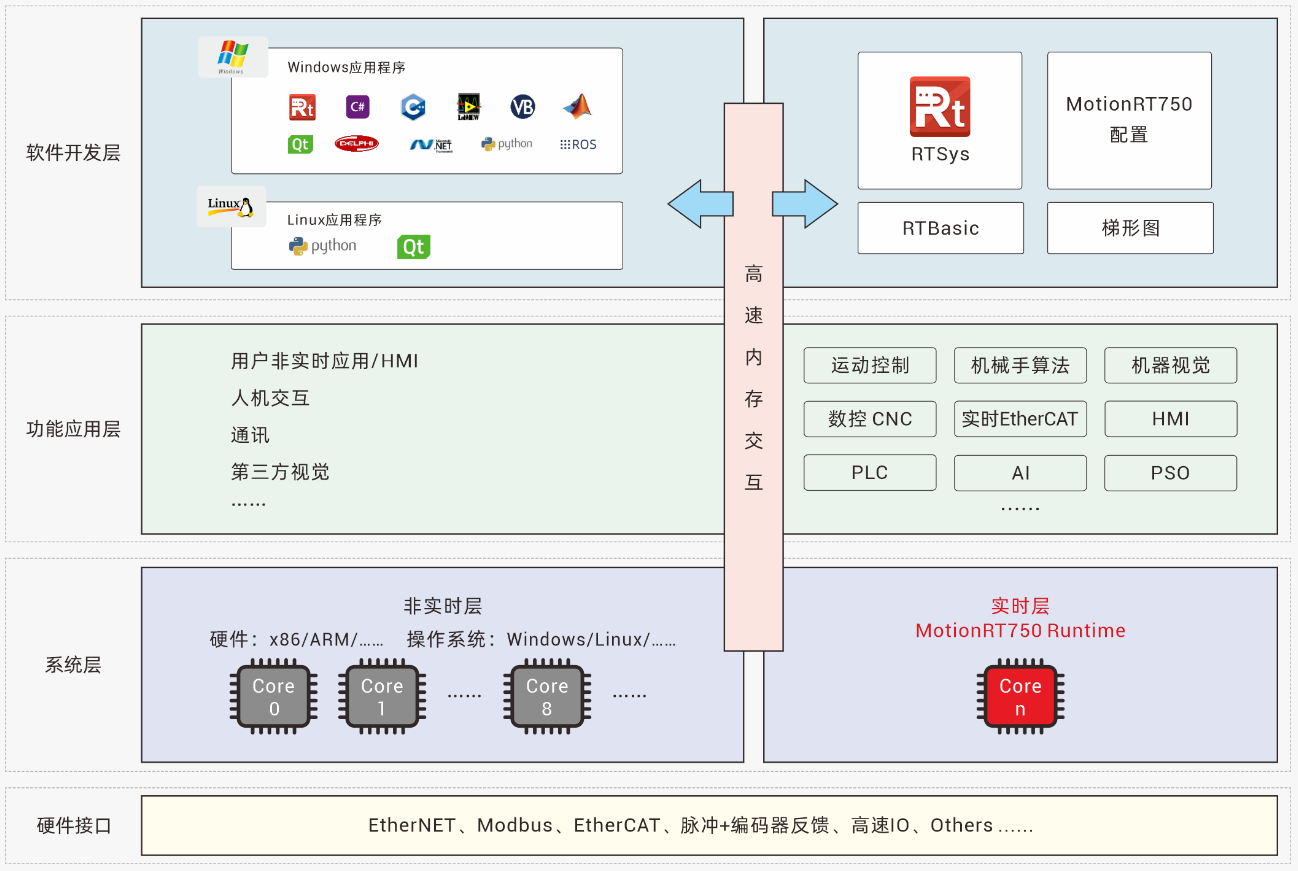
ԓ�������ê�(d��)ռ�_��CPU��(n��i)�˼��g(sh��)��(sh��)�F(xi��n)����(qi��ng)���ܵď�(qi��ng)��(sh��)�r(sh��)�\(y��n)�ӿ��ơ��������ĵ��\(y��n)�ӿ��ơ��C(j��)�����㷨����(sh��)�أ�CNC�����C(j��)��ҕ�X�ȏ�(qi��ng)��(sh��)�r(sh��)���΄�(w��)�������\(y��n)����1-2��(g��)����CPU���ϡ��c��ͬ�r(sh��)������CPU�˄t��ע��̎��Windows/Linux���P(gu��n)�ķnj�(sh��)�r(sh��)�΄�(w��)��
���⼯��MotionRT750 Runtime��(sh��)�r(sh��)���c����ϵ�y(t��ng)�nj�(sh��)�r(sh��)�ӣ������ø��ٹ����(n��i)���M(j��n)�Д�(sh��)��(j��)�������@���������\(y��n)�ӿ����c�όӑ�(y��ng)���g��ͨ��Ч�ʼ�����(sh��)��(zh��)���ٶȣ���K��(sh��)�F(xi��n)����(w��n)��������Ч�������b����ƣ��_�����\(y��n)�ӿ����΄�(w��)�Ľ^����(sh��)�r(sh��)���cϵ�y(t��ng)��(w��n)���ԣ��e�m���ڰ댧(d��o)�w������b��ȸ��ٸ߾��đ�(y��ng)�È��ϡ�
MotionRT750��(y��ng)�Ã�(y��u)�ݣ�
1.��ƽ�_�����ԣ�֧��Windows/Linuxϵ�y(t��ng)���m�䲻ͬ�ȼ�CPU��
2.�_�l(f��)�`���ԣ��ṩ���Z�Ծ��̽ӿڣ����ڶ����_�l(f��)�c���ܶ��ơ�
3.��(sh��)�r(sh��)��������ͨ�^CPU��(n��i)�˪�(d��)ռ�C(j��)���c��ЧLOCAL�ӿڣ���(sh��)�F(xi��n)2-3usָ������ڣ��^���y(t��ng)PCI/PCIe�������ٽ�20����
4.�U(ku��)չ������(qi��ng)�������EtherCATͨ���ܘ�(g��u)֧��254�S�\(y��n)�ӿ��Ƽ�500usEtherCAT���ڡ�
5.ϵ�y(t��ng)��(w��n)���ԣ�32�S125usEtherCAT����ܘ�(g��u)�������c(di��n)�����L(f��ng)�U(xi��n)�������B�m(x��)���a(ch��n)��
6.��ȫ�ɿ��ԣ�����Windowsϵ�y(t��ng)����Ӱ푣��{(l��n)��?x��)r�ԿɾS�ּ�ͣ�c��ȫͣ�C(j��)������Ч���_���a(ch��n)����ȫ�\(y��n)�С�
7.���ܔU(ku��)չ�ԣ���(sh��)�r(sh��)��(n��i)��֧��C�Z�Գ����_�l(f��)�����㹦����չ�c��(sh��)�r(sh��)���a����Ч�ʡ�
�����P(gu��n)��MotionRT750��Ԕ���B�cʹ���c(di��n)��→��(qi��ng)��(sh��)�r(sh��)�\(y��n)�ӿ��ƃ�(n��i)��MotionRT750(һ)���(q��)�Ӱ��b����(n��i)�������cʹ����
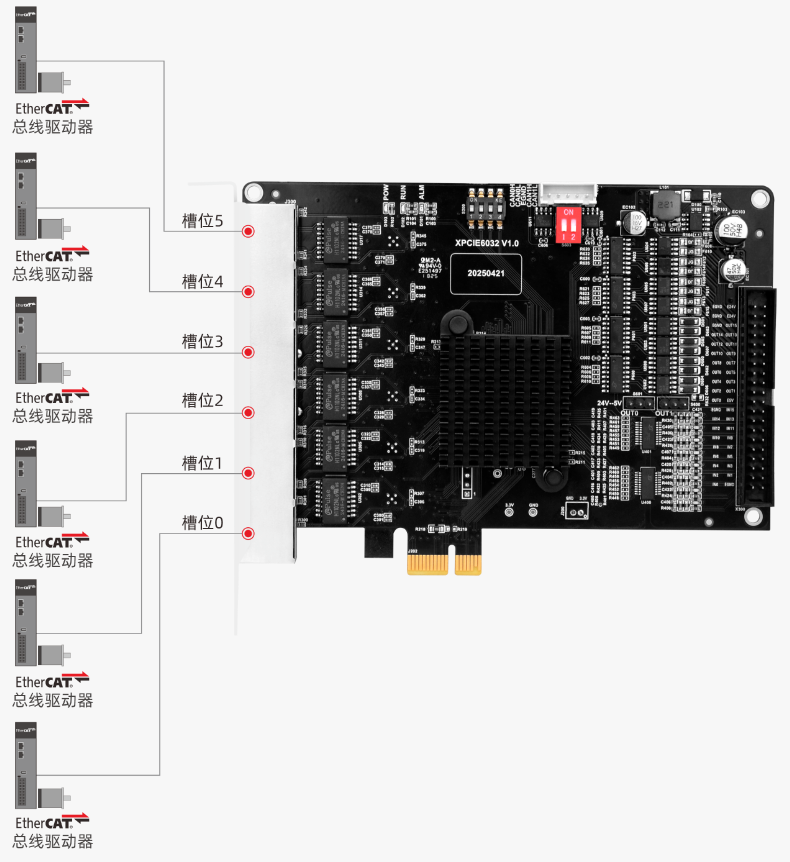
XPCIE6032H�\(y��n)�ӿ��ƿ�����6·��(d��)��EtherCAT��վ�ӿڡ�������߿�֧��254�S�\(y��n)�ӿ��ƣ�125usEtherCATͨӍ���ڕr(sh��)���ɂ�(g��)�˿�����������߿�֧��32�S�\(y��n)�ӿ��ơ�6��(g��)EtherCAT��վ��ͨ����(d��)����������EtherCAT��վ����Ӱ푡�
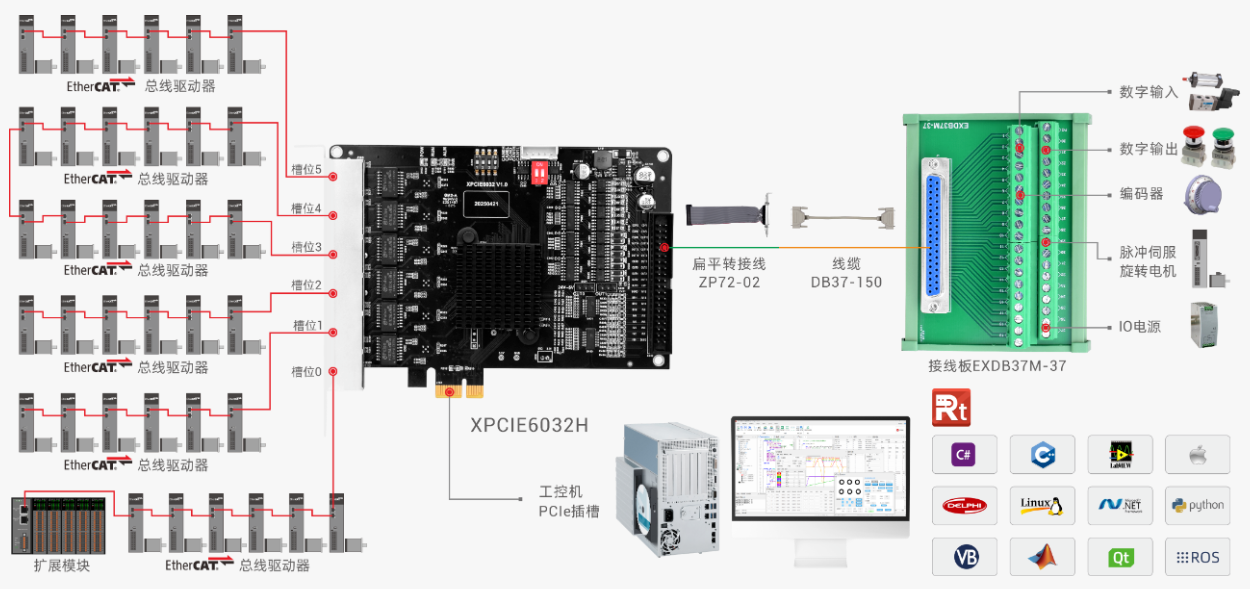
XPCIE6032H�\(y��n)�ӿ��ƿ�����댧(d��o)�w�O(sh��)�䡢����3C��ӡ������t(y��)���x��������Դ�b�䡢���ΙC(j��)���˼�����ӹ��ȸ��ٸ߾���������̾��C(j��)���NƬ�C(j��)�����x�C(j��)�����ЯBһ�w�C(j��)�����ٮ��β���O(sh��)����Ԅӻ��b���ṩ�����\(y��n)�ӿ���֧�֡�
XPCIE6032HӲ�����ԣ�
1.EtherCATͨӍ���ڿɵ�125us����Ҫ���C(j��)�����c��(sh��)�r(sh��)�����)��
2.�忨����6·��(d��)����EtherCAT��վ�ӿڣ�����֧��254�S�\(y��n)�ӿ��ơ�
3.���d�\(y��n)�ӿ��ƌ�(sh��)�r(sh��)��(n��i)��MotionRT750��
4.���^�ڂ��y(t��ng)��PCI/PCIe���W(w��ng)�ڵ�ͨӍ��ʽ���ٶȿ�����10-100�����ϡ�
5.���d16·����ݔ�룬16·����ݔ����
6.���d4·�����i�棬4·ͨ��PWMݔ����
�����P(gu��n)��XPCIE6032H��Ԕ���B�cʹ���c(di��n)��→ȫ���ׄ�(chu��ng)��PCIe����(sh��)�r(sh��)6ͨ��EtherCAT�\(y��n)�ӿ��ƿ����У���
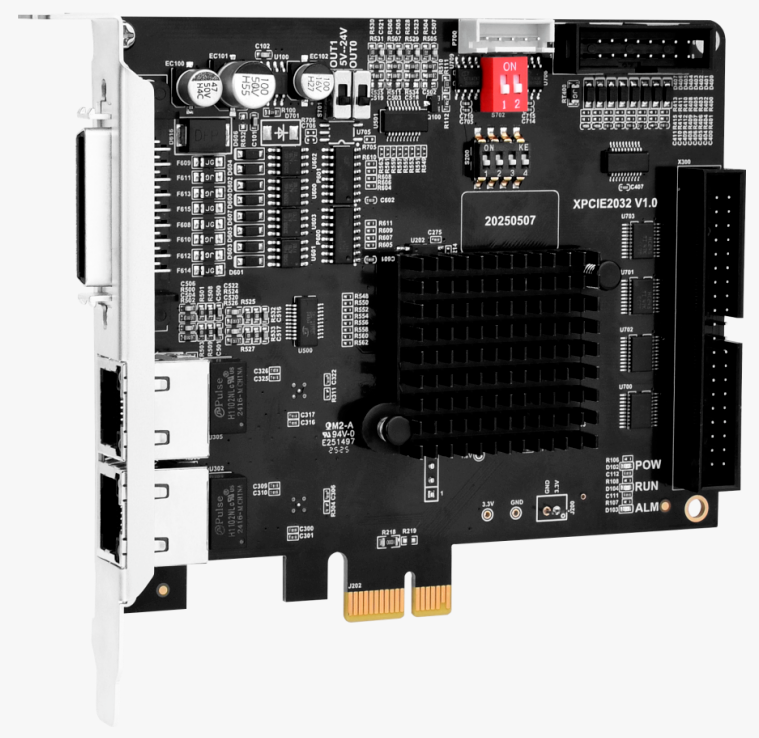
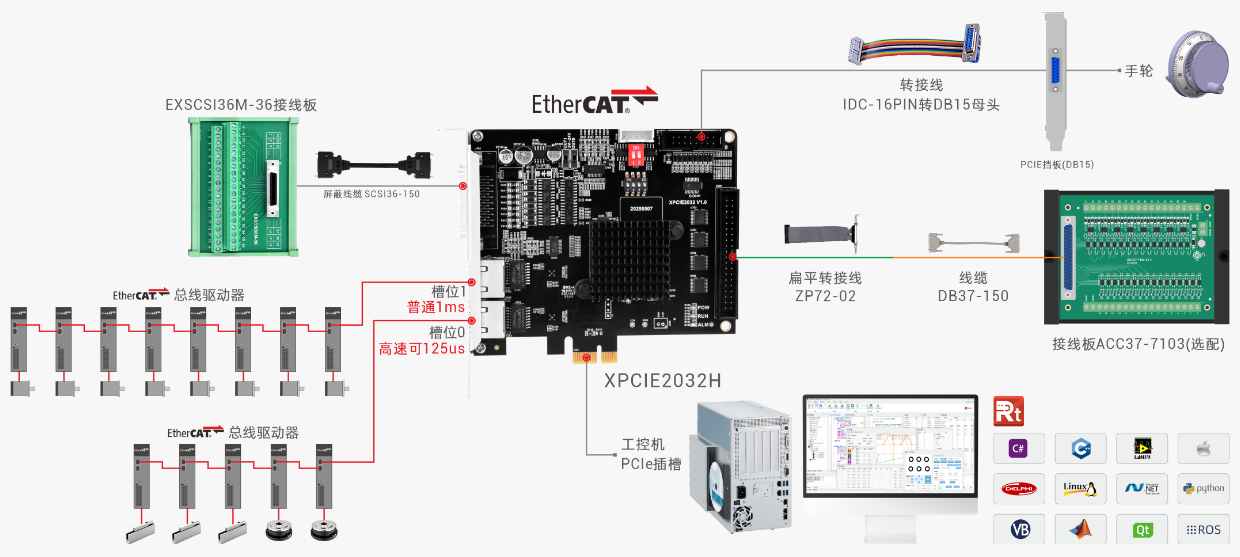
XPCIE2032H����2·��(d��)��EtherCAT�ӿڡ�������߿�֧����254�S�\(y��n)�ӿ��ƣ�125usEtherCATͨӍ���ڕr(sh��)���νӿ���߿�֧��32�S�\(y��n)�ӿ��ơ�2��(g��)EtherCAT��վ��ͨ����(d��)����������EtherCAT��վ����Ӱ푡�
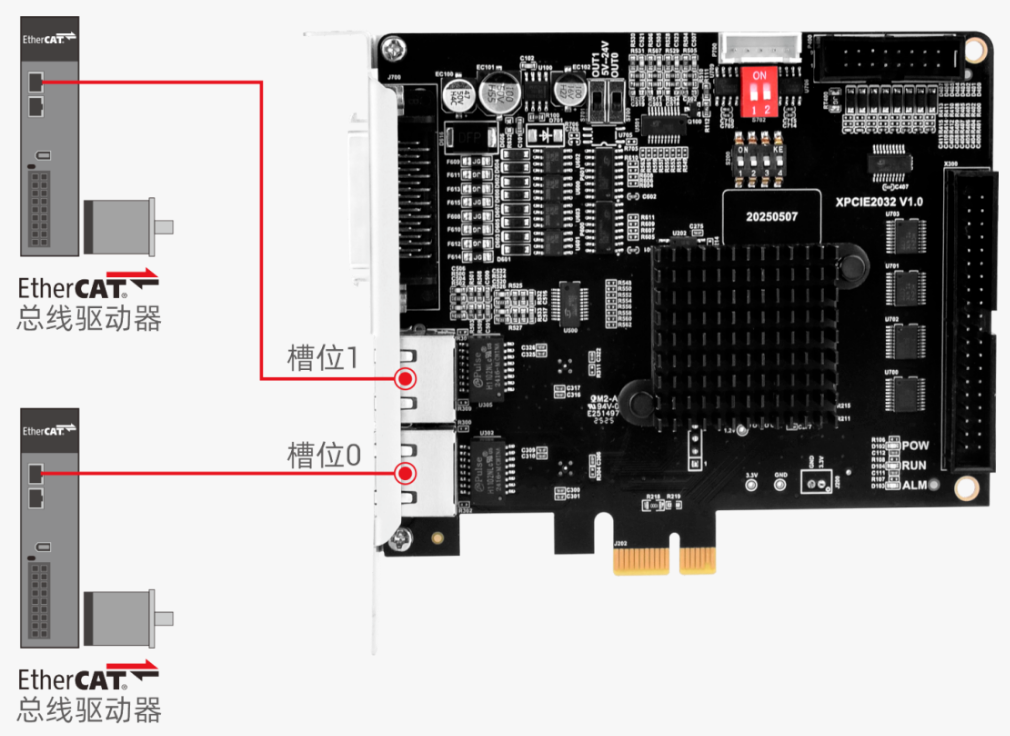
�pEtherCAT��վ�˿ڿ������O(sh��)�Þ�����ͨ�����҃ɂ�(g��)�˿�Ҳ�O(sh��)�Þ鲻ͬ���ͨ��:
�� ����ͨ��-EtherCATͨӍ����125us
�� ��Ҏ(gu��)ͨ��-EtherCATͨӍ����250us-8ms
XPCIE2032HӲ�����ԣ�
1.EtherCATͨӍ���ڿɵ�125us����Ҫ���C(j��)�����c��(sh��)�r(sh��)�����)��
2.�忨����2·��(d��)����EtherCAT��վ�ӿڣ�����֧��254�S�\(y��n)�ӿ��ơ�
3.���d�\(y��n)�ӿ��ƌ�(sh��)�r(sh��)��(n��i)��MotionRT750��
4.���^�ڂ��y(t��ng)��PCI/PCIe���W(w��ng)�ڵ�ͨӍ��ʽ���ٶȿ�����10-100�����ϡ�
5.���d8·����ݔ�룬16·����ݔ����
6.���d4·�����i�棬4·ͨ��PWMݔ����
�����P(gu��n)��XPCIE2032H��Ԕ���B�cʹ���c(di��n)��→���ٸ߾��\(y��n)�ӿ��ƣ�PCIe����(sh��)�r(sh��)2ͨ��EtherCAT�\(y��n)�ӿ��ƿ����У���
XPCIE1032H��һ�����PCI Express��EtherCAT�����\(y��n)�ӿ��ƿ������x6-64�S�\(y��n)�ӿ��ƣ�֧�ֶ�·���ٔ�(sh��)��ݔ��ݔ�������p�Ɍ�(sh��)�F(xi��n)���Sͬ�����ƺ��ٔ�(sh��)��(j��)��ݔ��
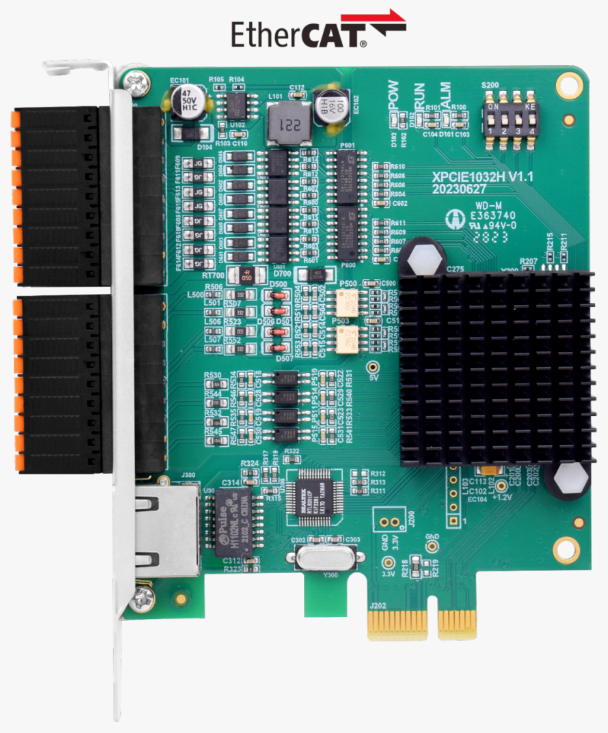
XPCIE1032H�\(y��n)�ӿ��ƿ������ˏ�(qi��ng)����\(y��n)�ӿ��ƹ��ܣ��Y(ji��)��MotionRT7�\(y��n)�ӿ��ƌ�(sh��)�r(sh��)ܛ�ˣ���Q�˸��ٸ߾���(y��ng)���У�PC Windows�_�l(f��)�ķnj�(sh��)�r(sh��)ʹ�c(di��n)��ָ����ٶȱȂ��y(t��ng)��PCI/PCIe��10����
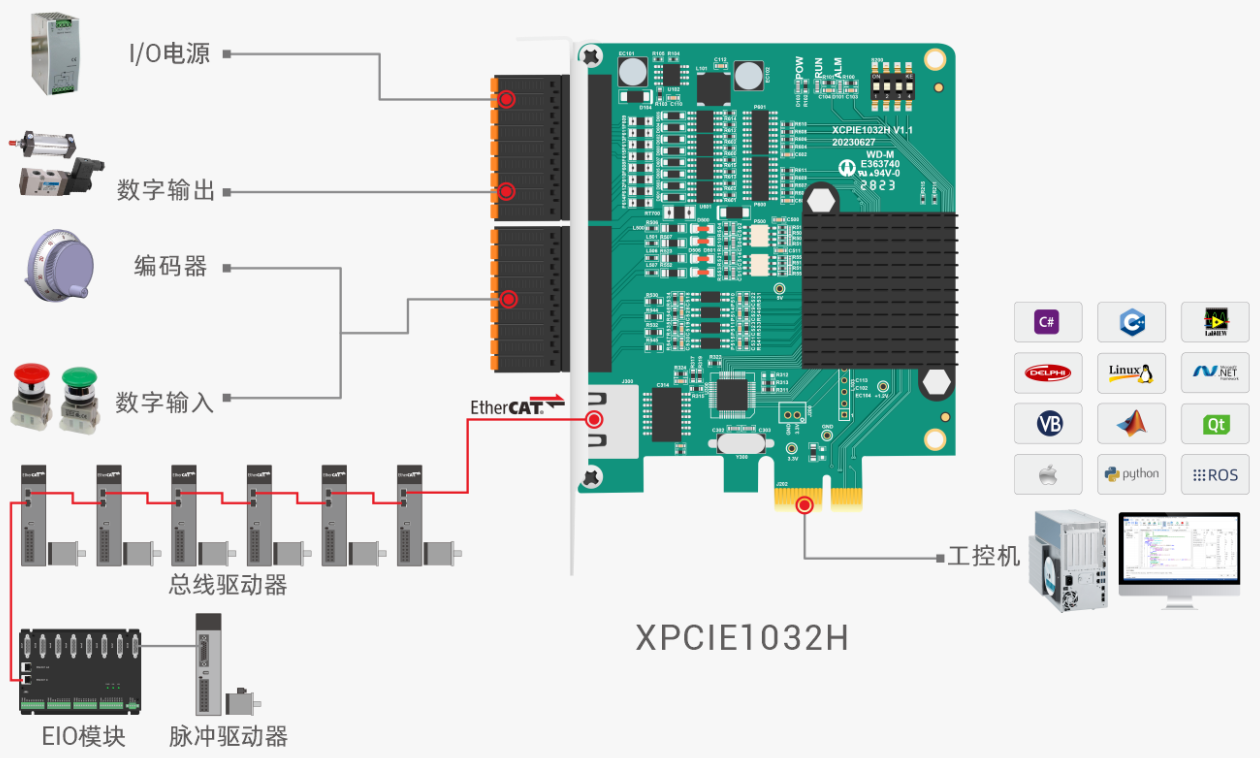
XPCIE1032HӲ�����ԣ�
1.6-64�SEtherCAT����+�}�_���x������4·�ζ�500KHz�}�_ݔ����
2.16�SEtherCATͬ������500us��֧�ֶ(li��n)�ӡ�
3.���d16�c(di��n)ͨ��ݔ�룬16�c(di��n)ͨ��ݔ��������8·����ݔ���16·����ݔ����
4.ͨ�^EtherCAT�������ɔU(ku��)չ��512��(g��)���xݔ���ݔ���ڡ�
5.֧��PWMݔ��������(zh��n)ݔ����PSOӲ��λ�ñ��^ݔ����ҕ�X�w�ĵȡ�
6.֧��ֱ�����a(b��)���A�����a(b��)���B�m(x��)܉�E�ӹ����ٶ�ǰհ����
7.֧�����݆������X݆��λ���i�桢ͬ�����S��̓�M�S���ݾ��a(b��)��?sh��)ȹ��ܡ?/p>
8.֧��30+�C(j��)е��ģ�������ģ���㷨������SCARA��Delta��UVW��4�S/5�S RTCP...
�����P(gu��n)��XPCIE1032HԔ���c(di��n)��“��ֹ10�����٣�PCIe EtherCAT��(sh��)�r(sh��)�\(y��n)�ӿ��ƿ�XPCIE1032H �����u�y��”�鿴��
LabVIEW�M(j��n)��MotionRT750�(xi��ng)Ŀ�Ą�(chu��ng)���c�_�l(f��)
1.�ҵ��S���ṩ�Ĺ�P�Y������LabVIEW��VI���ļ���·�����¡�
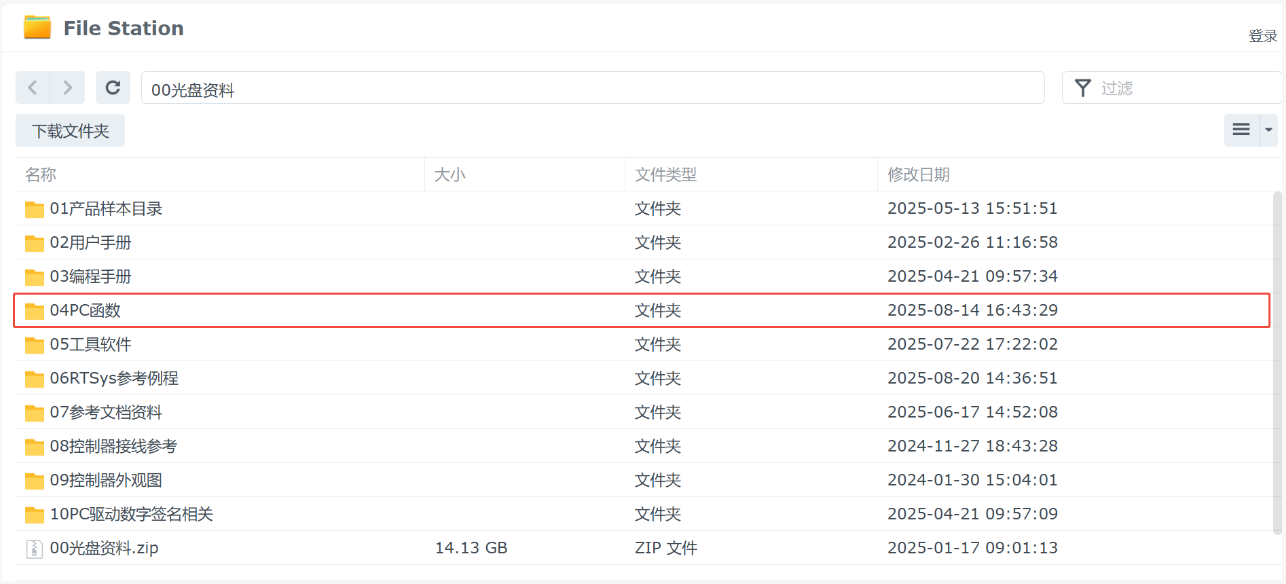
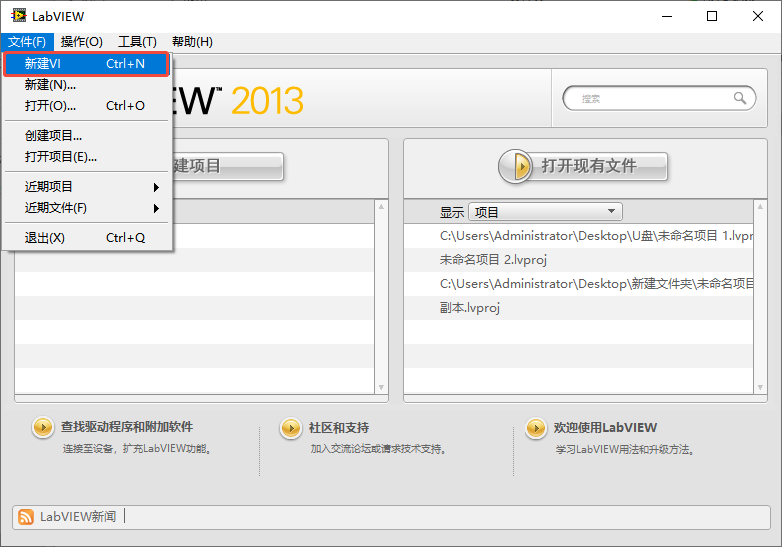
��1���M(j��n)��S���ṩ�Ĺ�P�Y���ҵ�“04PC����(sh��)”�ļ��A���c(di��n)���M(j��n)�롣
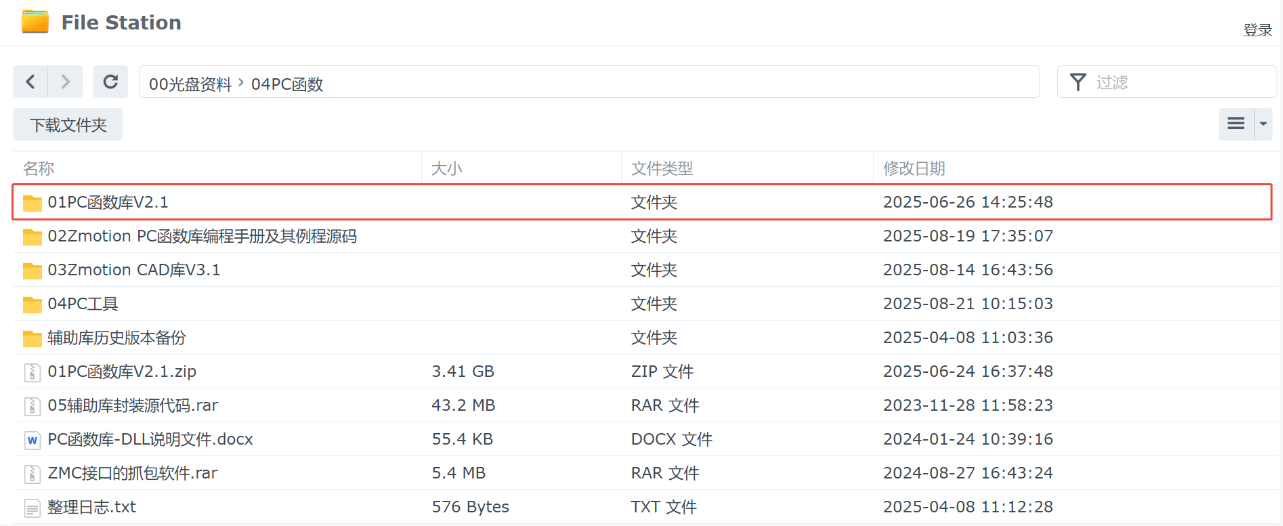
��2���x��“01PC����(sh��)��V2.1”�ļ��A��
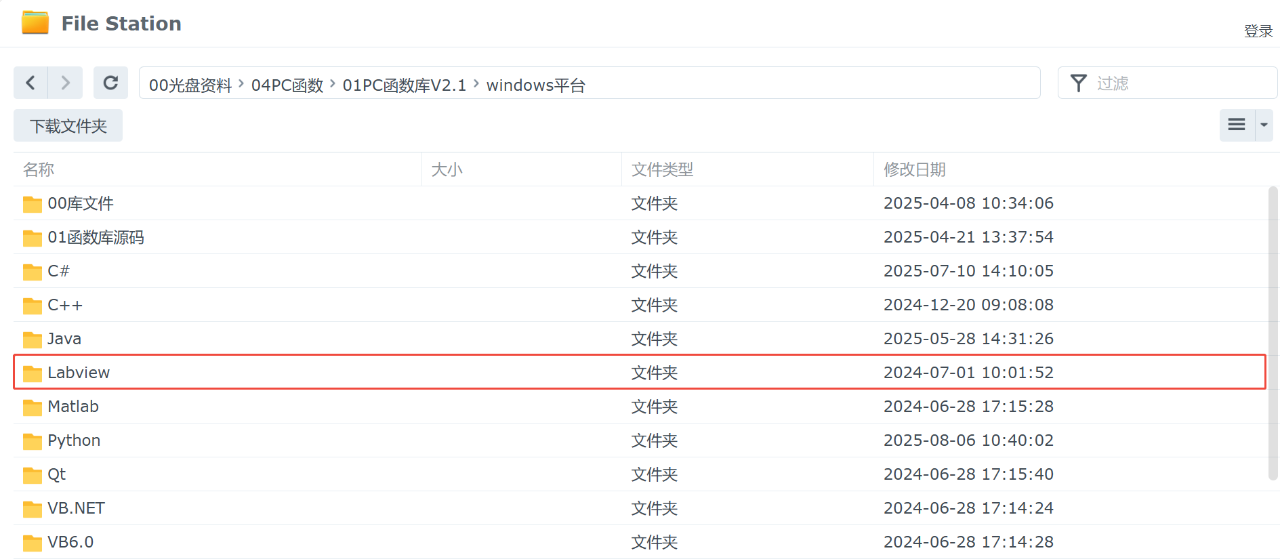
��3���x��“Windowsƽ�_”�ļ��A��

��4���x��“LabVIEW”�ļ��A��������32λ��64λ�ĄӑB(t��i)������̡�

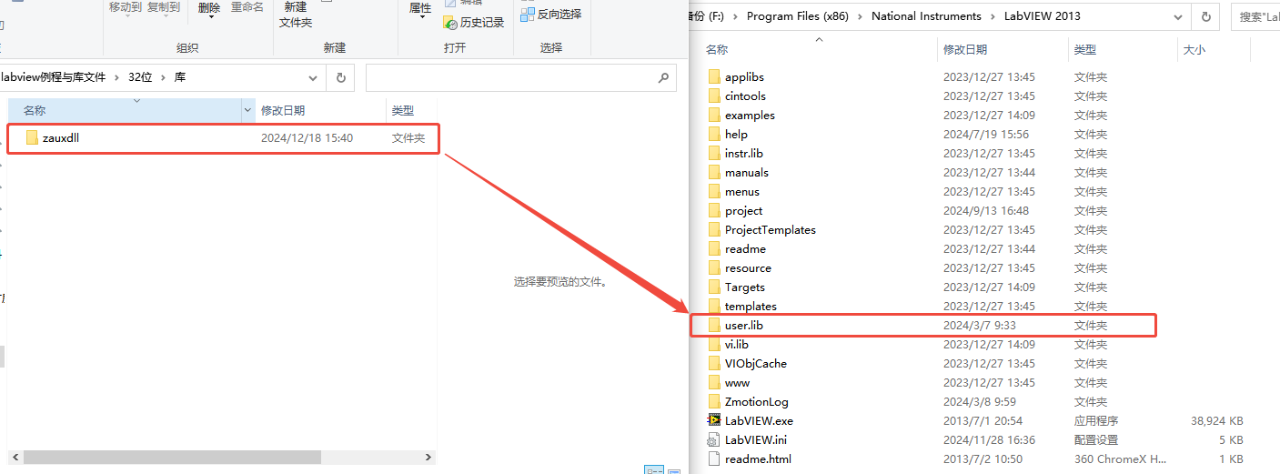
2.���S���ṩ��LabVIEW��VI���ļ���(f��)�Ƶ�LabVIEW���b·����LabVIEW/user.lib���ļ��A��(n��i)��
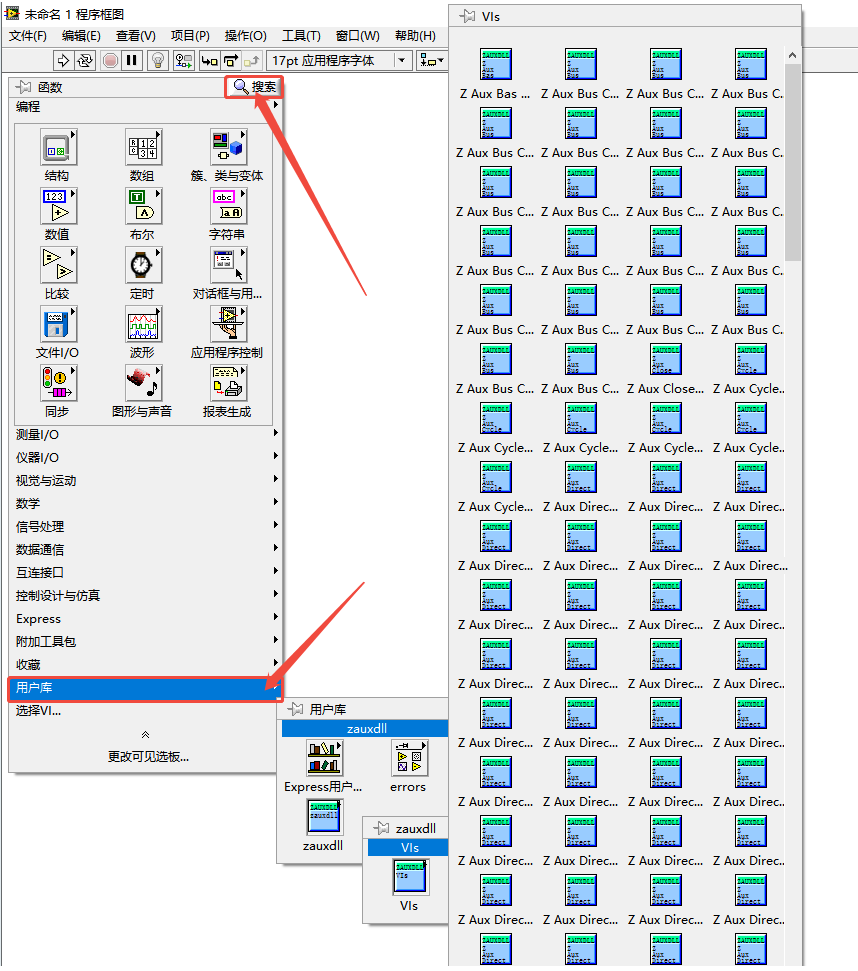
��1���ҵ��≺��VI���ļ��A��zaudll��32λ��VI�죬64��VI����newZauxDll64����
��2���x��LabVIEW�ғ����_�ļ�����λ�ã��@����LabVIEW2013-32λ������ʾ����
��3��������(g��)VI���ļ��Aֱ�ӏ�(f��)�Ʒŵ�user.libԓĿ䛣�Ȼ���P(gu��n)�]LabVIEWܛ�������ӡ�
3.������LabVIEW���x���½�VI��Ȼ�����I�c(di��n)��VI�����D�հ�̎���x���Ñ����ҵ����ӵ�VI�죬����ֱ������VI�������Ҫ�ĺ���(sh��)ֱ���ϵ�����ϡ�
PC����(sh��)��B
1.PC����(sh��)�փԿ��ڹ�P�Y�ϲ鿴�����w·�����¡�
2.PC����(sh��)��B
��N�B�ӷ�ʽ�M(j��n)��ָ����yԇ
LabVIEW���������{(di��o)ԇ��LOCAL��ʽ�B�ӡ��W(w��ng)�ڷ�ʽ�B���Լ�PCI��ʽ�B�ӕr(sh��)�ĆΗl����lָ����r(sh��)�g�yԇ��
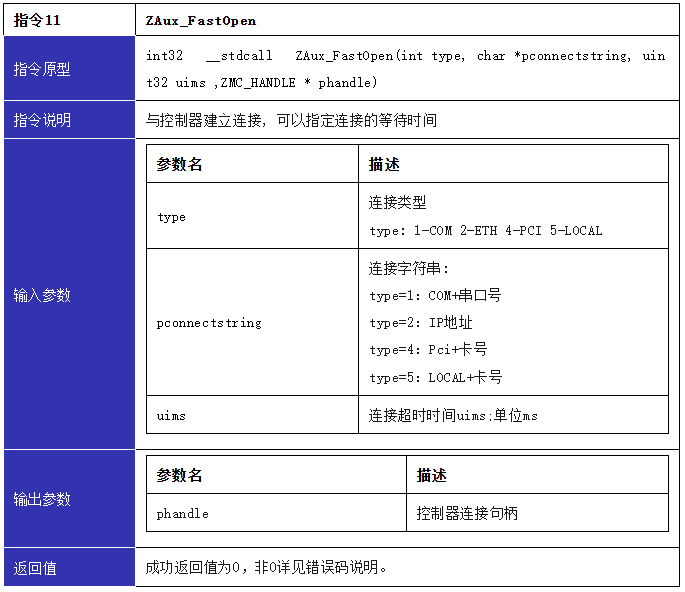
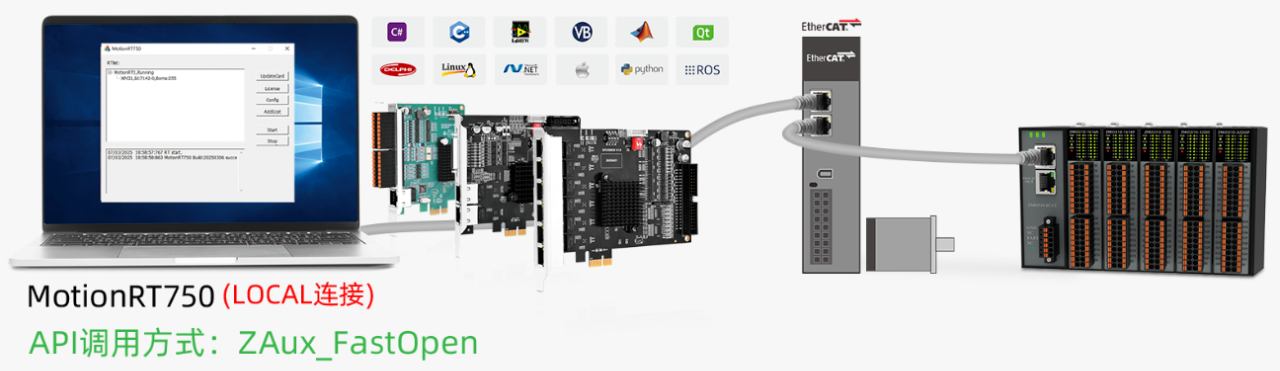
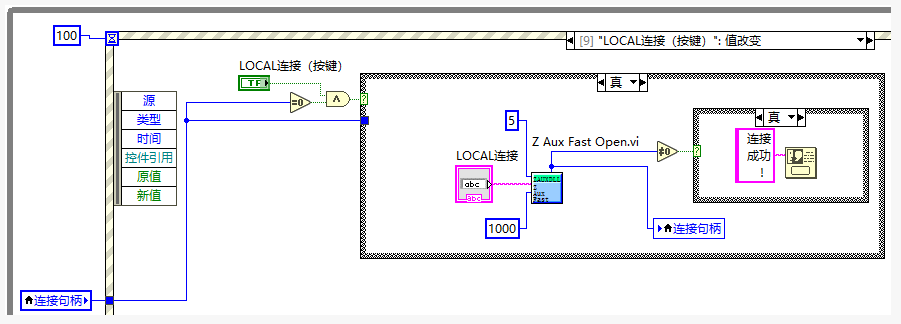
1.ͨ�^LOCAL�B�Ӱ��o���¼�̎�����{(di��o)�ú���(sh��)ZAux_FastOpen()���x���B�����5ȥ�B�ӿ�������LOCAL�B�ӷ�ʽ����
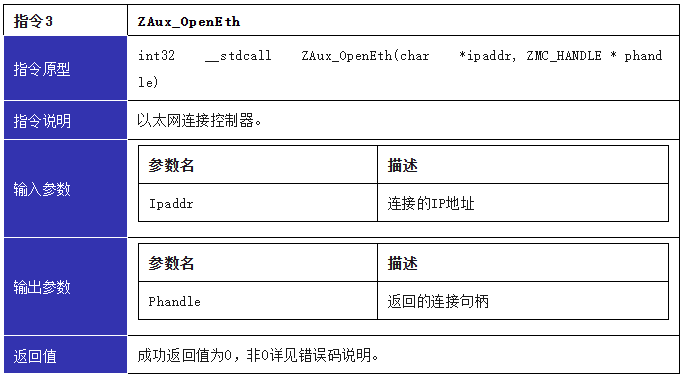
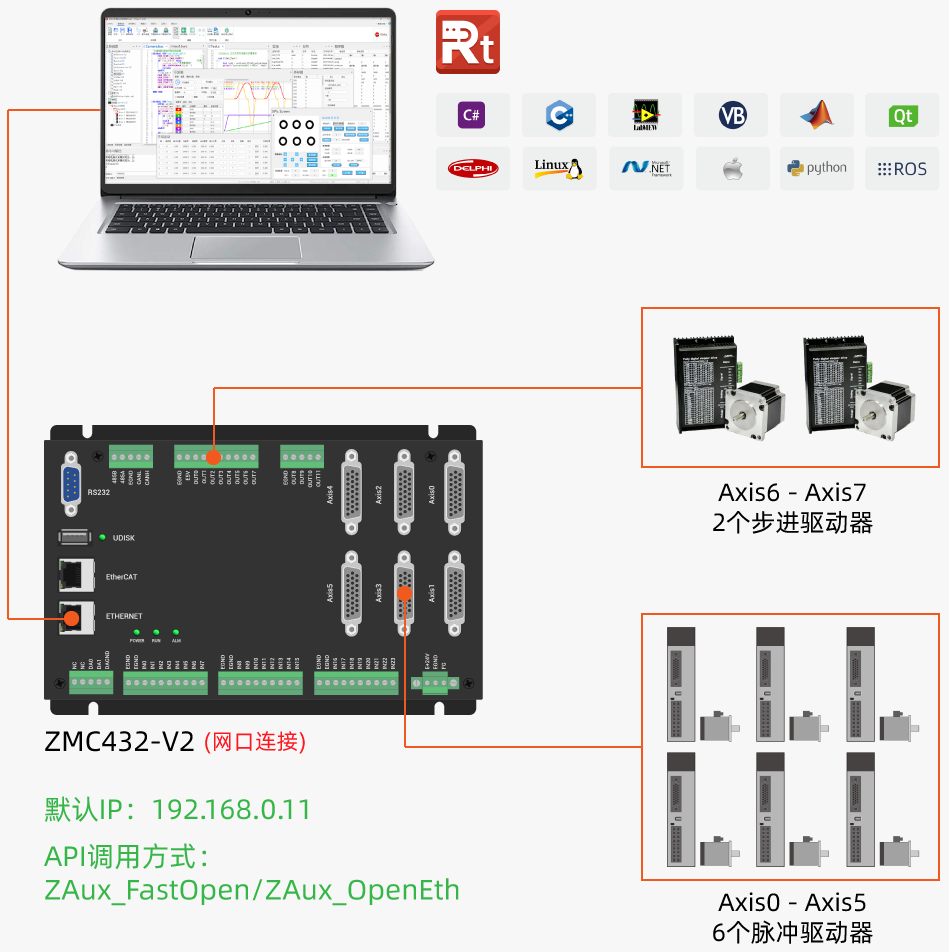
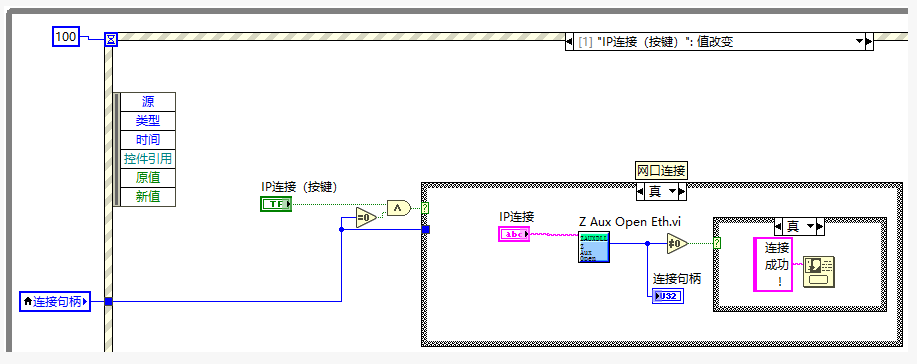
2.ͨ�^�W(w��ng)���B�Ӱ��o���¼�̎������(sh��)���{(di��o)�ú���(sh��)ZAux_OpenEth()ȥ�B�ӿ��������W(w��ng)���B�ӷ�ʽ����
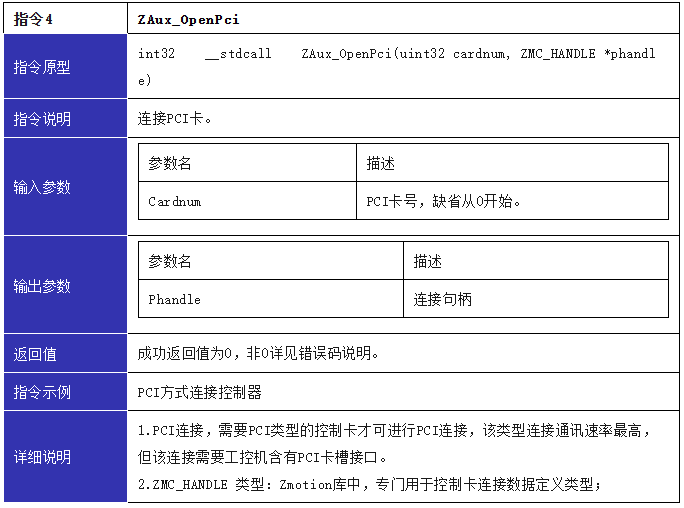
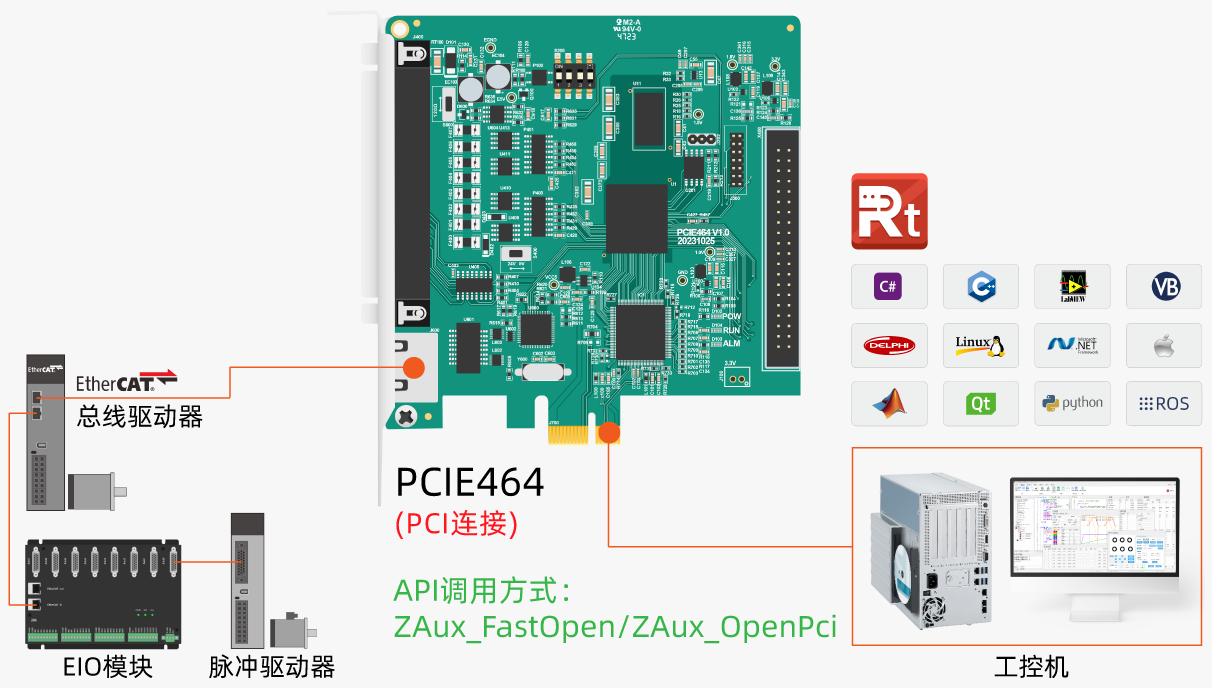
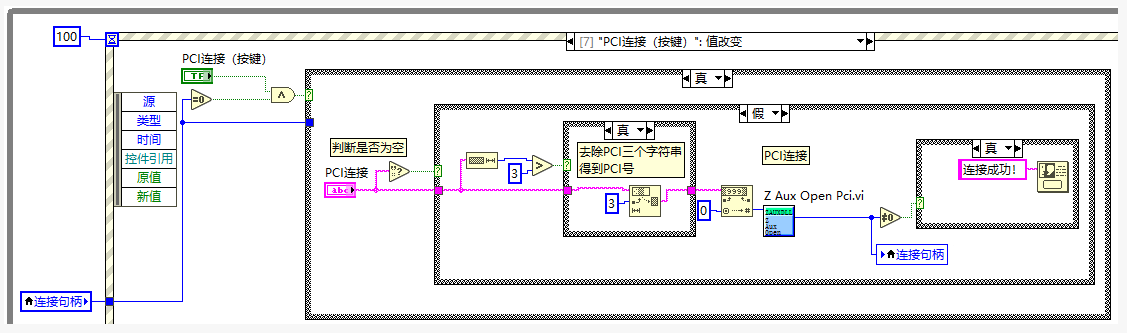
3.ͨ�^PCI�B�Ӱ��o���¼�̎������(sh��)���{(di��o)�ú���(sh��)ZAux_FastOpen()���x���B�����4ȥ�B�ӿ�������PCI�B�ӷ�ʽ����
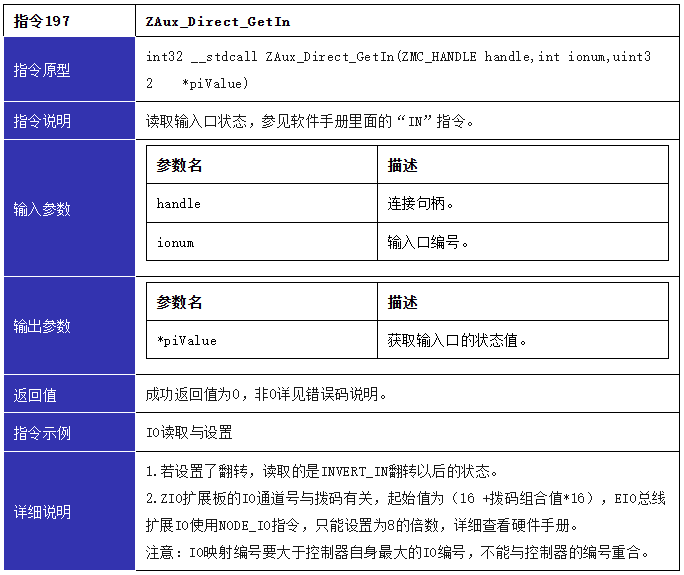
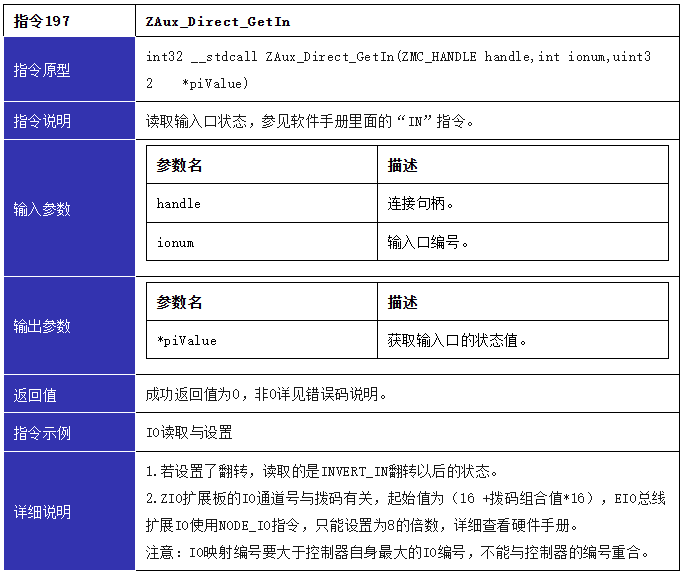
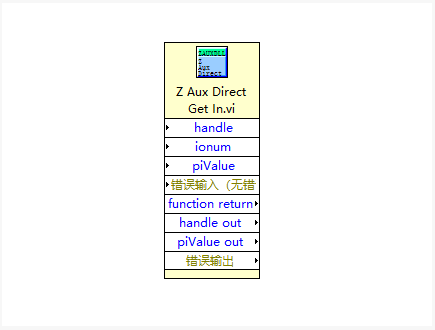
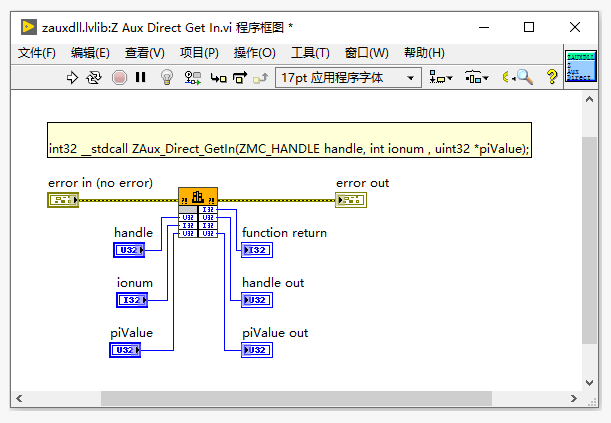
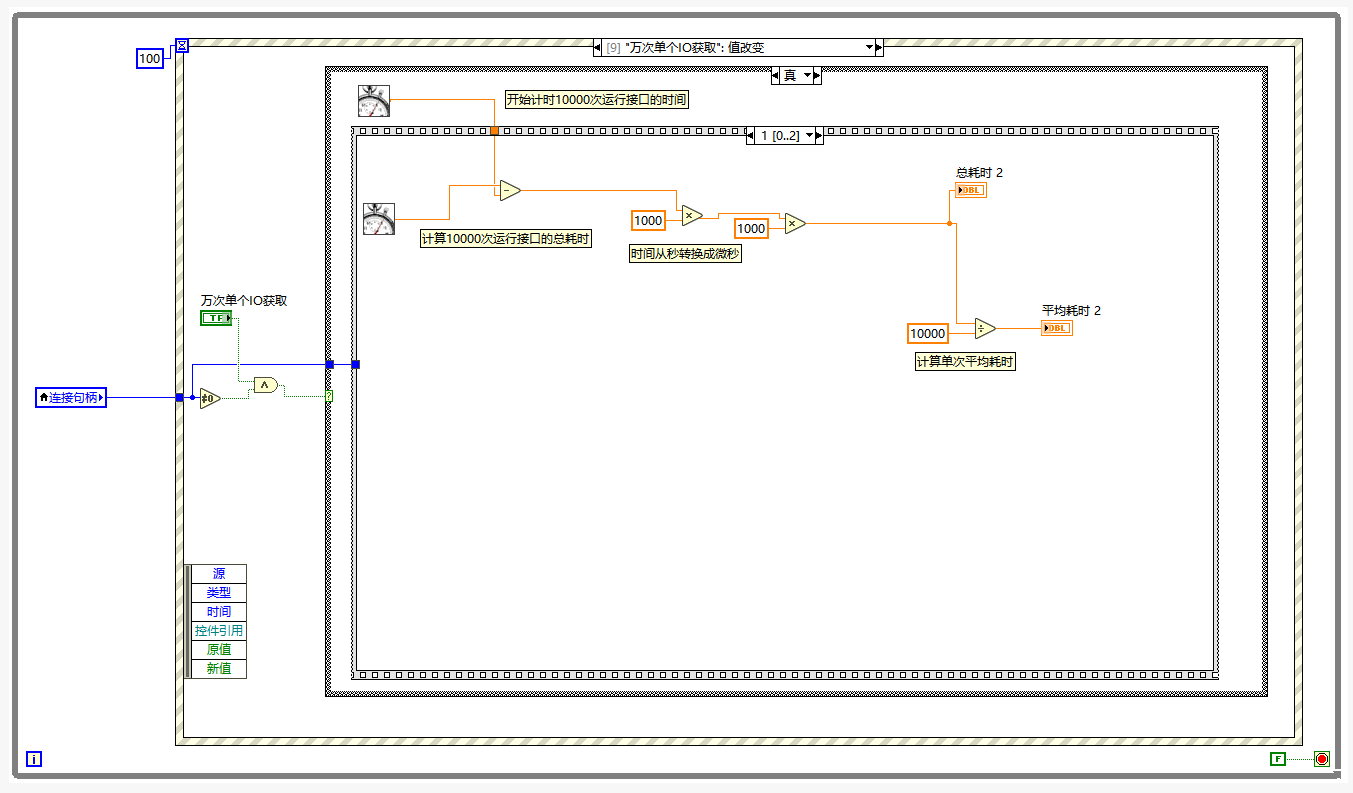
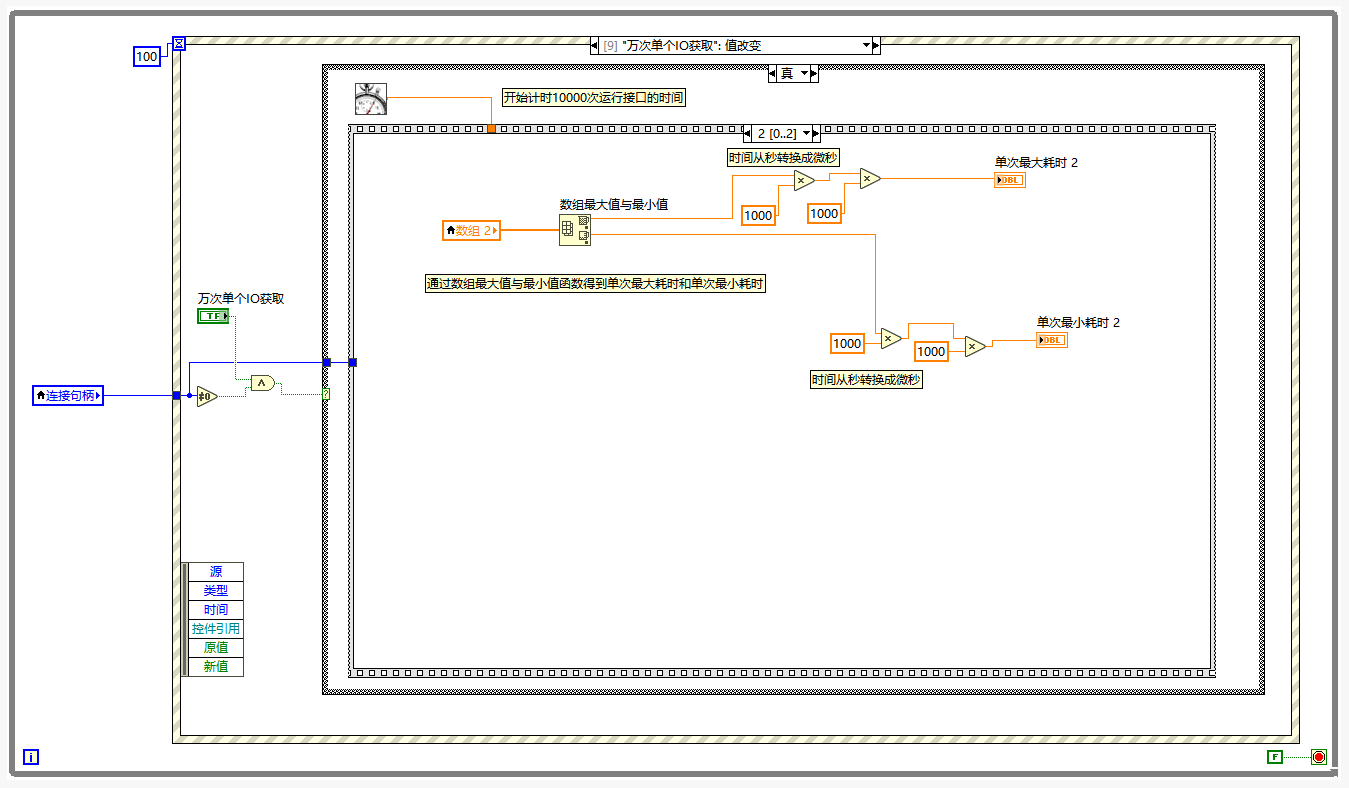
4.ͨ�^��ָ��VI����Ӌ(j��)�r(sh��)���̵õ��������ڵĺĕr(sh��)��(��ZAux_Direct_GetIn�ӿڞ�����)
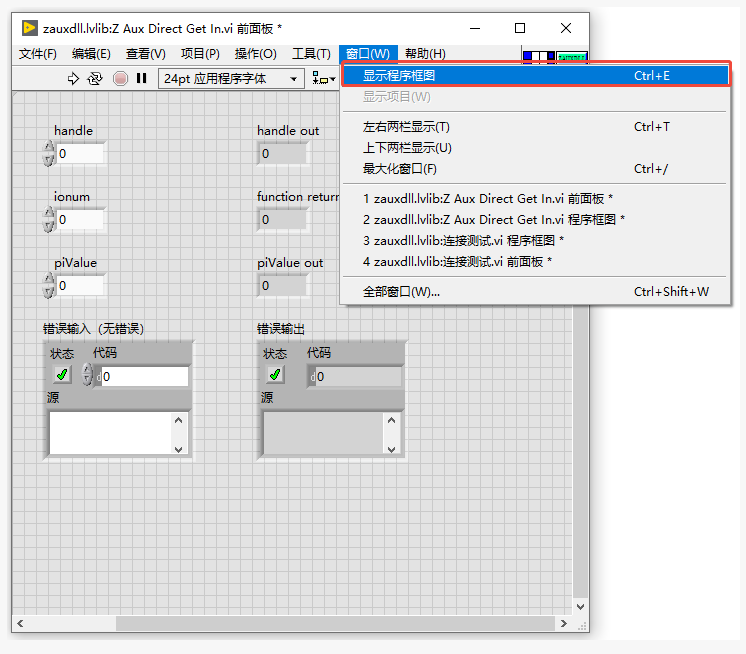
��1�����I�p��VI�ӿڣ��M(j��n)��VI�ӿ�ǰ��塣
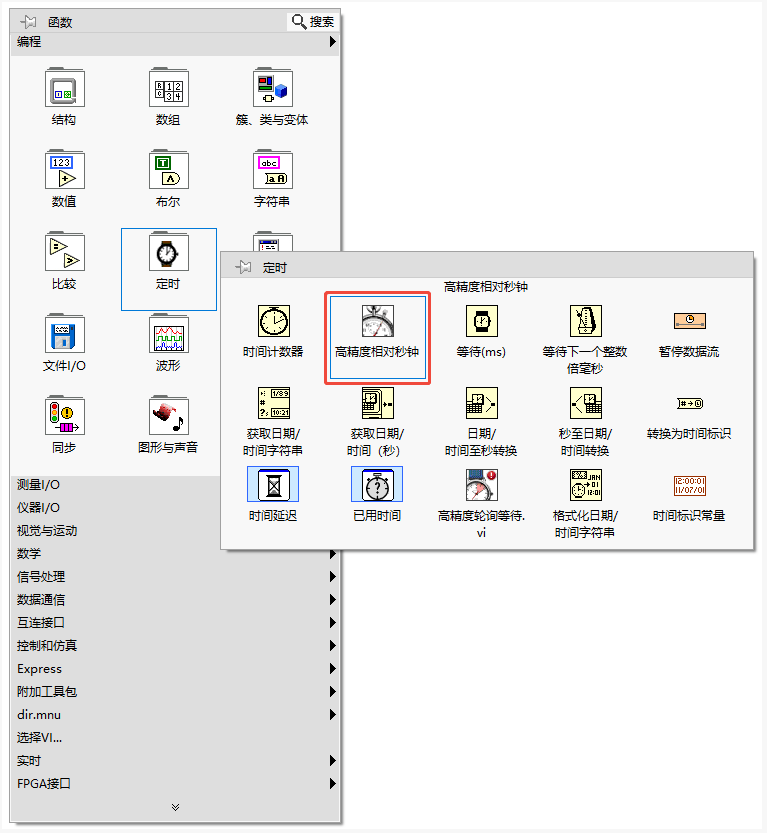
��2���c(di��n)���ӿ�VI���@ʾ�����D���M(j��n)������D��������I�c(di��n)���հ�̎���x��“�r(sh��)�g”����(sh��)������“�߾����������”����(sh��)�ɂ�(g��)���քe�����_ʼ�r(sh��)�g�ͽY(ji��)���r(sh��)�g�ī@ȡ���ߡ�
���ɂ�(g��)�r(sh��)�g����(sh��)�քe�����ڽӿ��{(di��o)�õ�ǰ��λ�ã�ͨ�^���p�õ��ӿڈ�(zh��)�еĕr(sh��)�g��Ķ��@��ԓ���{(di��o)�õĺĕr(sh��)��(sh��)ֵ��
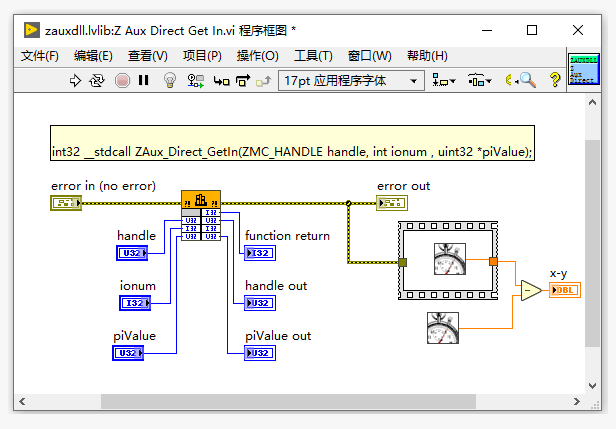
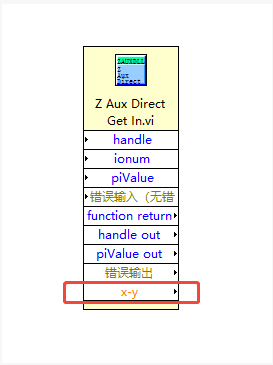
��3������VI�ӿڵ�ǰ��壬�x��ǰ������Ͻǵ���VI��(ji��)�c(di��n)ģʽ��ʹ�����(bi��o)�x��հĽӾ����Լ�x-y�@ʾ�ؼ�����(chu��ng)��x-y�@ʾ�ؼ��ĽӾ��ˡ�
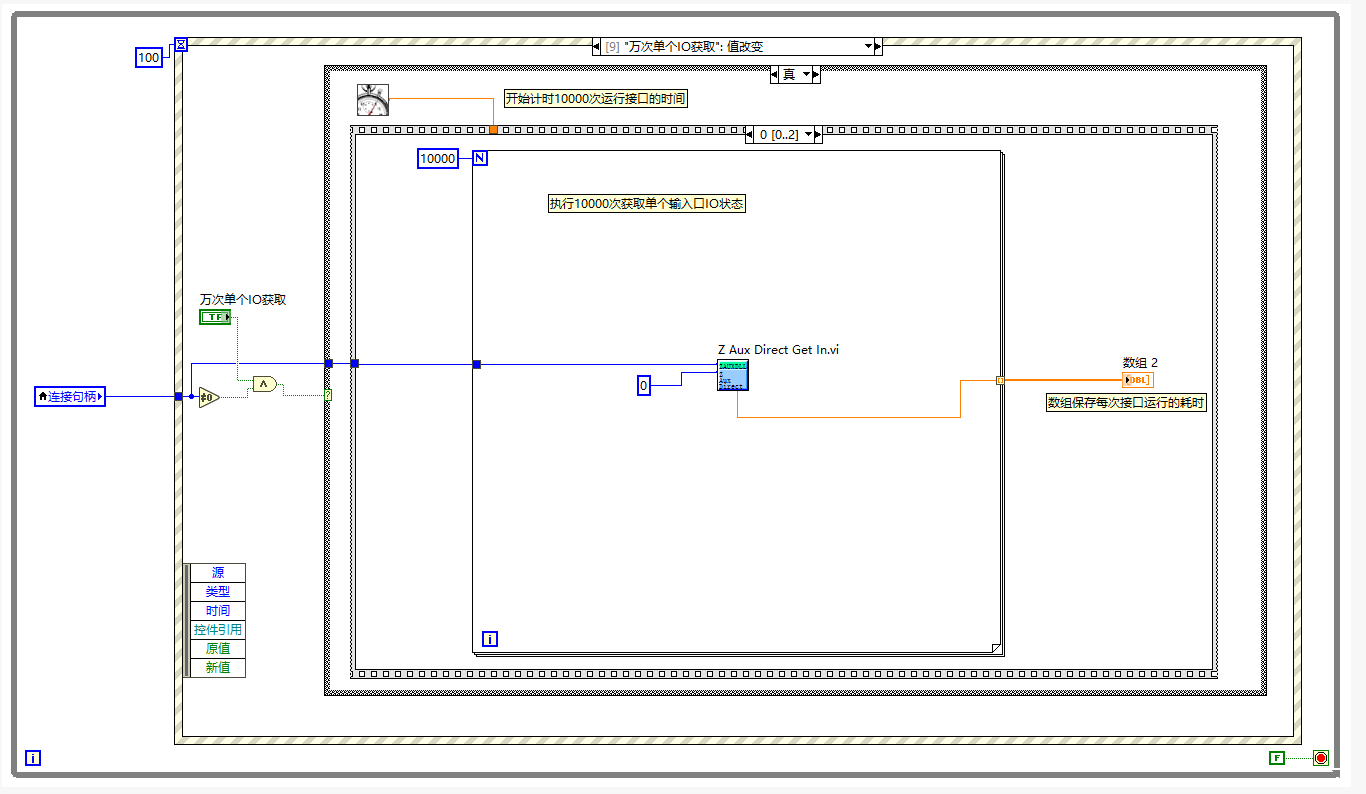
5.ͨ�^�yԇ���o���¼�̎������(sh��)��Ӌ(j��)��1W�lָ��Ŀ��ĕr(sh��)������ƽ���ĕr(sh��)���δ����ĕr(sh��)�͆δ���С�ĕr(sh��)��(��ZAux_Direct_GetIn�ӿڞ�����)
�\(y��n)����
LOCAL��PCI���W(w��ng)�����N�B�ӷ�ʽ�ĆΗlָ��Ͷ��lָ����r(sh��)�g�yԇ�Y(ji��)�����D��ʾ��

LOCAL�B�ӷ�ʽ�yԇ(1w��)

PCI�B�ӷ�ʽ�yԇ(1w��)

�W(w��ng)���B�ӷ�ʽ�yԇ(1w��)
�Y(ji��)Փ�c����
һ��LabVIEW��(sh��)��(j��)����
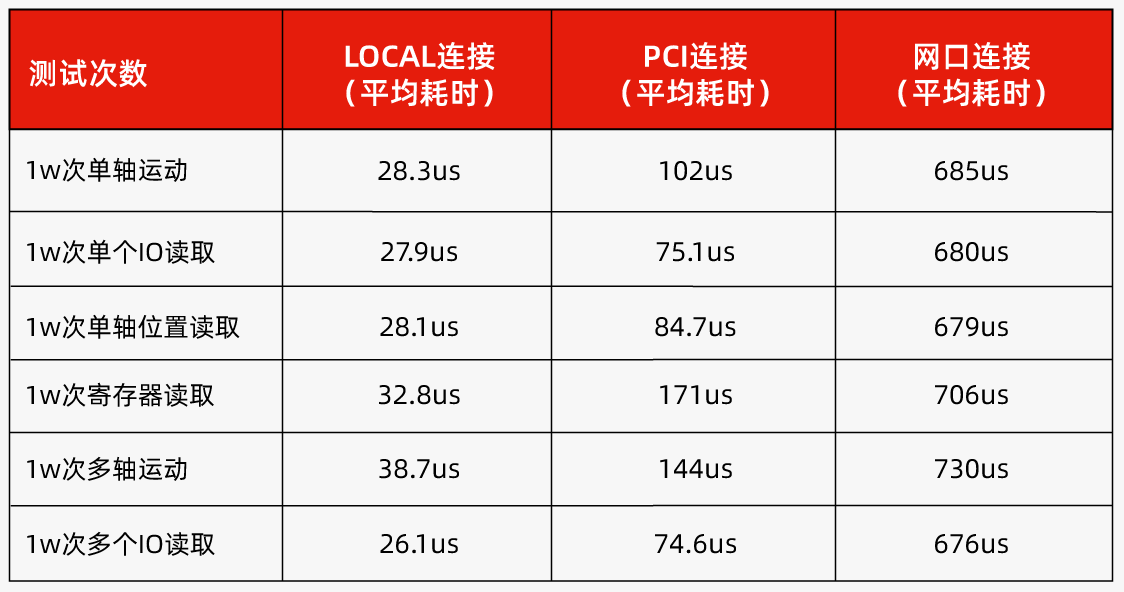
����LOCAL��ʽ�B�ӡ�PCI��ʽ�B���Լ��W(w��ng)�ڷ�ʽ�B�ӕr(sh��)��ָ����r(sh��)�g�yԇ��LabVIEW������������\(y��n)��Ч���D�Ĕ�(sh��)��(j��)�@ʾ���������Կ�����
��(d��ng)LabVIEW�M(j��n)��1w�ε�ָ����ĕr(sh��)��LOCAL�B�ӷ�ʽ�M(j��n)��ָ�������Ҫ�ĕr(sh��)�g����Ҫ��PCI�B�Ӻ�IP�B�ӵķ�ʽ���졣
����C#��(sh��)��(j��)����
��“��(qi��ng)��(sh��)�r(sh��)�\(y��n)�ӿ��ƃ�(n��i)��MotionRT750(��)��us�����ٽ���֮C#���������b������”�����еĔ�(sh��)��(j��)��֪��
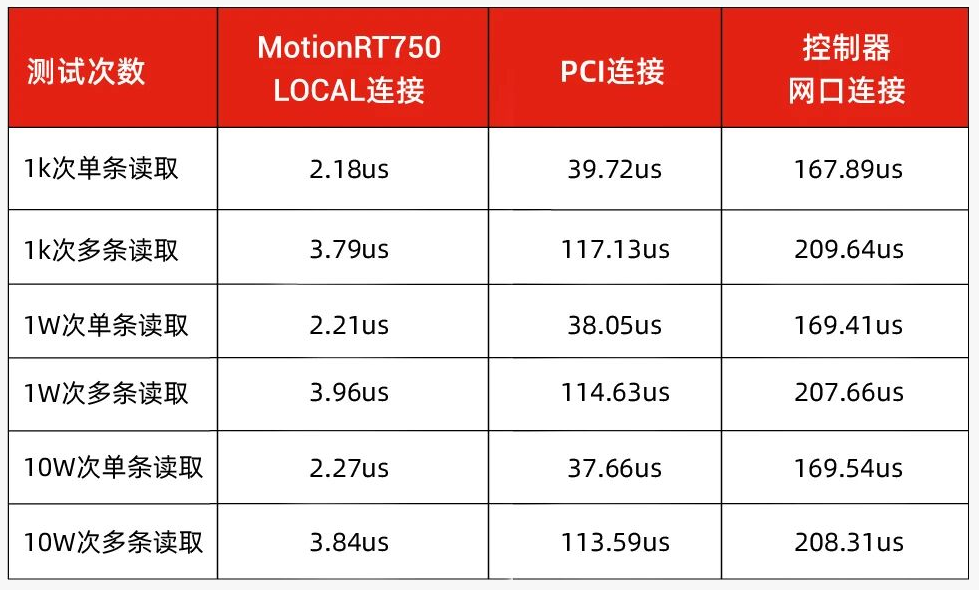
����MotionRT750��LOCAL��ʽ�B�ӡ�PCI��ʽ�B�ӺͿ������W(w��ng)�ڷ�ʽ�B�ӕr(sh��)�ĆΗl����lָ����r(sh��)�g�yԇ��C#����������ı���(sh��)��(j��)�@ʾ���������Կ�����
��(d��ng)C#�M(j��n)��1k��1w�κ�10w�εĆ�ָ�������lָ����ĕr(sh��)��MotionRT750��LOCAL�B�ӷ�ʽ�M(j��n)�ІΗlָ�������Ҫ�ĕr(sh��)�g��ƽ��2.2us���ң���һ�����xȡ12��(g��)��B(t��i)�Ķ��lָ�������Ҫ�ĕr(sh��)�g��ƽ��3.9us���ң�������Ҫ��PCI�B�ӺͿ������W(w��ng)���B�ӵķ�ʽ���죨PCI�Ηlƽ��38us���ҡ����lƽ��115us���ң��W(w��ng)�چΗlƽ��169us�����lƽ��208us���ң���
����C++��(sh��)��(j��)����
��“��(qi��ng)��(sh��)�r(sh��)�\(y��n)�ӿ��ƃ�(n��i)��MotionRT750(��)��us�����ٽ���֮C++���������b������”�����еĔ�(sh��)��(j��)��֪��
����MotionRT750��LOCAL��ʽ�B�ӡ�PCI��ʽ�B�ӺͿ������W(w��ng)�ڷ�ʽ�B�ӕr(sh��)�ĆΗl����lָ����r(sh��)�g�yԇ��C++����������ı���(sh��)��(j��)�@ʾ���������Կ�����
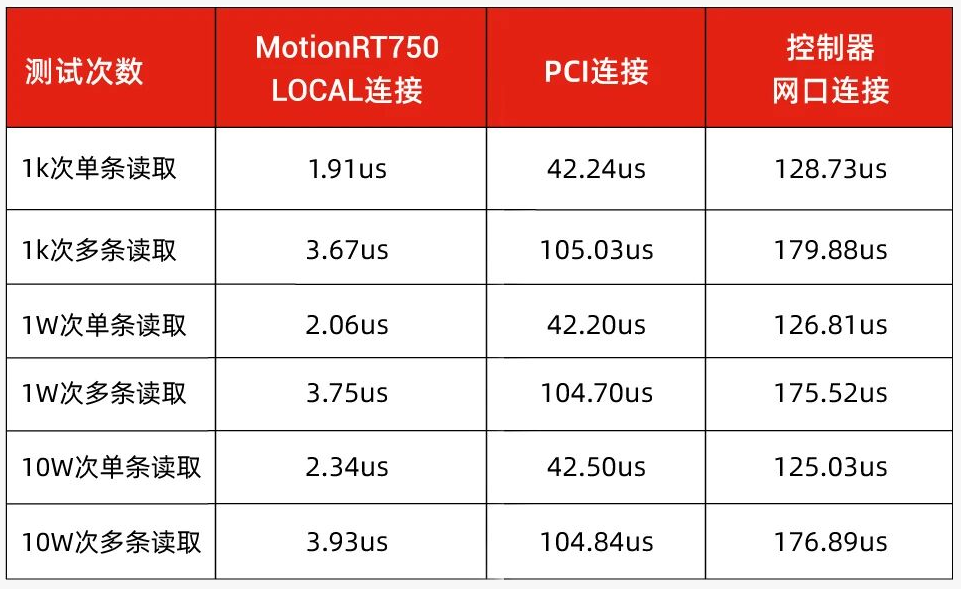
��(d��ng)C++�M(j��n)��1k��1w�κ�10w�εĆ�ָ�������lָ����ĕr(sh��)��MotionRT750��LOCAL�B�ӷ�ʽ�M(j��n)�ІΗlָ�������Ҫ�ĕr(sh��)�g��ƽ��2.1us���ң���һ�����xȡ12��(g��)��B(t��i)�Ķ��lָ�������Ҫ�ĕr(sh��)�g��ƽ��3.8us���ң�������Ҫ��PCI�B�ӺͿ������W(w��ng)���B�ӵķ�ʽ���죨PCI�Ηlƽ��42us���ҡ����lƽ��105us���ң��W(w��ng)�چΗlƽ��127us�����lƽ��177us���ң���
������ᘌ��yԇ��(sh��)��(j��)�ķ������Y(ji��)���Y(ji��)�ϲ�ͬ�B�ӷ�ʽ��LOCAL��PCI���W(w��ng)�ڣ���LabVIEW�cC#��C++�еĶ�N����ָ���е����ܱ��F(xi��n)��
��1��LOCAL�B�ӷ�ʽ�ڴ����(sh��)��r�¾�չ�F(xi��n)����͵�ָ����ĕr(sh��)���@����������ٵĔ�(sh��)��(j��)��ݔͨ���͵����t���ԡ������چ��S�\(y��n)�ӡ���(g��)IO�xȡ�����Sλ���xȡ���Ĵ����xȡ�Լ�����(g��)IO�xȡ��ָ���(zh��)���У�LOCAL�B�ӵ�ƽ���ĕr(sh��)�@����(y��u)��PCI�;W(w��ng)���B�ӷ�ʽ����������̎�����١��߾��ȵ��\(y��n)�ӿ����΄�(w��)�r(sh��)�����@����(y��u)�ݡ�
��2��PCI�B�ӷ�ʽ�������Ͻ���LOCAL�;W(w��ng)��֮�g���mȻ��ָ����ĕr(sh��)�^LOCAL�B���������ӣ������h(yu��n)���ھW(w��ng)���B�ӡ�
��3���W(w��ng)���B�ӷ�ʽ�mȻָ����ĕr(sh��)���L�����ڌ�(sh��)�H��(y��ng)�����Ծ����䪚(d��)�صăr(ji��)ֵ���e�����h(yu��n)�̱O(ji��n)�ء��ֲ�ʽ����ϵ�y(t��ng)�Լ���Ҫ��W(w��ng)�j(lu��)ͨ�ŵĈ����У��W(w��ng)���B�ӑ{����V���ļ����Ժ��`���ԣ��ɞ鲻�ɻ�ȱ��ͨ���ֶΡ�
��4��C#��C++���x���ٶȿ���LabView���x���ٶȣ�LabView�ķ�������ռ����һЩ��(zh��)��Ч�ʣ��Ñ����Ը���(j��)��(sh��)�H�����x��ͬ�ľ����Z�ԡ�
�C���������҂����ԏĜyԇ�Y(ji��)��������MotionRT750��LOCAL�B�ӷ�ʽչ�F(xi��n)Խ�Č�(sh��)�r(sh��)���ܣ�ָ�����Ч��Ҳ�dz��ķ�(w��n)����ָ����r(sh��)�g���Ӳ��������t����(w��n)������ȫ�惞(y��u)��PCI�;W(w��ng)�ڵ��B�ӣ������m�ϸ߾��ȡ��ߌ�(sh��)�r(sh��)�ԡ��߷�(w��n)���ԵĹ��I(y��)�\(y��n)�ӿ��ƈ�����(y��ng)�á�
LabVIEW�����v��ҕ�l���c(di��n)��→“��(qi��ng)��(sh��)�r(sh��)�\(y��n)�ӿ��ƃ�(n��i)��MotionRT750(��)��us�����ٽ���֮LabVIEW���������b������_��������_bilibili”�鿴��
���Σ����\(y��n)�Ӽ��g(sh��)��(qi��ng)��(sh��)�r(sh��)�\(y��n)�ӿ��ƃ�(n��i)��MotionRT750(��)��us�����ٽ���֮LabVIEW���������b�����٣��ͷ������@�
���ྫ�ʃ�(n��i)��Ո�P(gu��n)ע“���\(y��n)��С����”����̖����Ҫ���P(gu��n)�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\(y��n)�Ӽ��g(sh��)�N�۹��̎���400-089-8936��
���������\(y��n)�Ӽ��g(sh��)ԭ��(chu��ng)���gӭ����D(zhu��n)�d����ͬ�W(xu��)��(x��)��һ������Ї���������ˮƽ�����°��(qu��n)�w���\(y��n)�Ӽ��g(sh��)���У������D(zhu��n)�dՈע������Դ��
|

