һ��XPLC006E���ܽ�B
XPLC006E�����\(y��n)���\(y��n)�ӿ������Ƴ���һ����S��(j��ng)��(j��)��EtherCAT�����\(y��n)�ӿ�������XPLCϵ���\(y��n)�ӿ������ɑ�(y��ng)���ڸ��N��ҪÓ�C(j��)��(li��n)�C(j��)�\(y��n)�еĈ��ϡ�
XPLC006E�Ԏ�6��늙C(j��)�S�����12�S�\(y��n)�ӿ��ƣ���̓�M�S��(sh��)����֧��12�Sֱ�����a(b��)�����݆������X݆��ͬ�����S��̓�M�S�O(sh��)�õȹ��ܡ�
XPLC006E֧�ֶ��΄�(w��)ͬ�r�\(y��n)�У�ͬ�r������PC��ֱ�ӷ����\(y��n)�У����̷�ʽ��N���x��֧��ZDevelopܛ����Basic/PLC���ΈD/HMI�M�B(t��i)�ͳ�����λ�C(j��)ܛ�����̡�
XPLC006Eֻ֧��EtherCAT�����S����֧���}�_�S�;��a���S������EtherCAT�����c�(q��)����ͨӍ��1ms��ˢ�����ڡ�
XPLC006E֧��PLC��Basic��HMI�M�B(t��i)���N���̷�ʽ��PC��λ�C(j��)API����֧��C#��C++��LabVIEW��VB��matlab��Qt��Linux��.Net��iMAC��Python�� ROS�Ƚӿڡ�
→�˿�a(ch��n)Ʒ��XPLC004E��XPLC006E��XPLC008E������ͬ�S��(sh��)����̖���x��
����XPLC864E2���ܽ�B
XPLC864E2��XPLC006E�Ĺ��ܻ��A(ch��)���������������Ϲ�(ji��)��B��XPLC006E�Ĺ��ܶ�֧�֣��������YԴ���g��(y��u)��XPLC006E��ʹ�÷�������һ�£���֮ͬ̎����XPLC864E2��Ӳ��֧��32�c(di��n)ݔ�롢32�c(di��n)ݔ����2��ADC��2��DAC��֧���}�_�S�Ϳ����S���ʹ�ã�����(sh��)�S�S��(sh��)��8�����ˎ�EtherCAT�ӿ�֮�⣬ݔ����Ӳ���Ͽ����Þ�8���S���}�_������̖ݔ�����펧��·���a��ݔ�룬����ݔ������á�
XPLC864E2֧��PLC��Basic��HMI�M�B(t��i)���N���̷�ʽ��PC��λ�C(j��)API����֧��C#��C++��LabVIEW��VB��matlab��Qt��Linux��.Net��iMAC��Python�� ROS�Ƚӿڡ�
XPLCϵ�н�(j��ng)��(j��)��EtherCAT�����\(y��n)�ӿ�����֧�ֶ�N���̷�ʽ��֧��ʹ�����\(y��n)�Ӽ��g(sh��)�����аl(f��)��ZDevelop�_�l(f��)�h(hu��n)����basic�Z�Ժ�PLC���ΈD��ͬ�r߀֧�������ϳ��õ���λ�C(j��)�_�l(f��)�h(hu��n)���c����ϵ�y(t��ng)������������C��C++��C#��LabView��Matlab��Linux��ROS�ȡ�
����(ji��)��(n��i)����Ҫ�v��Basic�Z������_�l(f��)����������
����ǰ�ڜ�(zh��n)�乤��
�����\(y��n)�Ӽ��g(sh��)�پW(w��ng)���d�°澎��ܛ��ZDevelop V3.10.06����(zh��n)��һ�_XPLCϵ�н�(j��ng)��(j��)��EtherCAT�����\(y��n)�ӿ������������Ϸ���XPLC006E�����ܘ�(g��u)��ɽӾ���
�]�п������Ĉ���Ҳ�����ZBasic���_�l(f��)���������d���������\(y��n)�м��ɣ���������ZDevelopܛ�����b���Ԏ��ġ�
�ġ����dBasic��������
1. �½������(xi��ng)Ŀ�������d�����ļ����������\(y��n)�ӵ��������D��
���_���е��(xi��ng)Ŀ�ļ��\(y��n)�У���Ҫ���_“.zpj”�ļ������B�ӿ����������d�����\(y��n)�ӡ�
2. Ԕ��(x��)���������f����
(1)�½��(xi��ng)Ŀ���ˆΙ�“�ļ�”--“�½��(xi��ng)Ŀ”��
�c(di��n)��“�½��(xi��ng)Ŀ”��“�����”���棬�x��һ���ļ��A���_��ݔ���ļ������(xi��ng)Ŀ����Y��“.zpj”��
(2)�½��ļ����ˆΙ�“�ļ�”--“�½��ļ�”��
�c(di��n)��“�½��ļ�”���F(xi��n)�D�������x���½����ļ���͞�Basic���c(di��n)���_�J(r��n)��֧��Basic/Plc/Hmi��Ͼ��̡�
(3)�O(sh��)���ļ��Ԅ��\(y��n)�У��p���ļ���߅�Ԅ��\(y��n)�е�λ�ã�ݔ���΄�(w��)̖“0”��
(4)����������ɣ��c(di��n)�������ļ�����ֹ���õĴ��a�Gʧ���½���Basic�ļ����Ԅӱ��浽�(xi��ng)Ŀ“.zpj”���ڵ��ļ��¡�
(5)�B�ӵ����������ڳ���ݔ�봰�ھ��ó����c(di��n)��“������”--“�B��”���]�п������ǿ��x���B�ӵ������������\(y��n)�У��c(di��n)��“�B��”--“�B�ӵ�������”��
�c(di��n)��“�B��”����“�B�ӵ�������”���ڣ����x���B�ӻ�W(w��ng)���B�ӣ��x��ƥ��Ĵ��څ���(sh��)��W(w��ng)��IP��ַ���c(di��n)���B�Ӽ��ɡ��D��W(w��ng)���B�ӣ�������IP��192.168.0.36��
�B�ӳɹ������cݔ�����ڴ�ӡ��Ϣ��Connected to Controller:ZMC432 Version:4.93-20190128.������ُ�I��XPLC006Eϵ�п��������B��IP��192.168.0.11�����SĬ�J(r��n)IP��ַ�����oՓ�Ŀ����������������������ͬ�ġ�
(6)���d�����c(di��n)���ˆΙڰ��o“���d��RAM”���o“���d��ROM”�����d�ɹ������ݔ�����ڕ�����ʾ��ͬ�r�������d�����������Ԅ��\(y��n)�С�
�ɹ����d��RAM�ͳɹ����d��ROM����ʾ��Ϣ��
RAM���d��늺�����棬ROM���d��늺���档���d��ROM�ij����´��B���Ͽ�����֮�������ԄӰ����΄�(w��)̖�\(y��n)�С�
ע�⣺��(d��ng)��ӡ������ʾ�tɫ����Ϣerror�r������o�������\(y��n)�У����D��ָ���e�`���e��
�塢 �����\(y��n)�в鿴
1�������{(di��o)ԇ���c(di��n)���ˆΙ�“�{(di��o)ԇ”-“����/ֹͣ�{(di��o)ԇ”�{(di��o)���΄�(w��)�c�O(ji��n)ҕ���ڡ�
�΄�(w��)�������ڲ鿴���΄�(w��)���\(y��n)�Р�B(t��i)�Լ��΄�(w��)��̖���O(ji��n)ҕ�������ڱO(ji��n)���S����(sh��)���Զ��x׃����ݔ��ݔ����B(t��i)����Ϣ��
2���S����(sh��)�鿴���S����(sh��)�����ǂ��dz���Ҫ�Ĺ��ߣ������Ñ����٫@֪�����S����(sh��)�Į�(d��ng)ǰ��(sh��)��(j��)���^������\(y��n)���Ƿ���Ԕ�酢ҊZDevelop�����փ��S����(sh��)���ڵ�������
3��ʾ�����ɘӣ��ڲˆΙ�“ҕ�D” --“ʾ����”���_ʾ�������ڣ����ݰ��o�����D��
���_“�O(sh��)��”�x��Ҫ�ɼ���ͨ����(sh��)����ȡ��g���ȅ���(sh��)��_�J(r��n)���@���x��ɘ�����ͨ�����քe���S0�S1�S2��DPOS���O(sh��)������c(di��n)��“����”���o��
�����Ќ���TRIGGERָ���|�l(f��)ʾ�����ɘӣ������c(di��n)���ք��|�l(f��)���o������(zh��)���\(y��n)�ӳ���ɘӳ����²��Δ�(sh��)��(j��)��
(1)�����@ʾ�����Nģʽ���x
A.XTģʽ��������(sh��)��(j��)Դ��ֵ�S�r�g׃����������
B.XYģʽ��2Dģʽ�������S�ĺϳɲ��a(b��)܉�E��
C.XYZģʽ��3Dģʽ�������S�ڿ��g�ĺϳɲ��a(b��)܉�E��
(2)���a(b��)�����f��
XPLC006E�������Ԏ�6���S��֧��2-6�S(li��n)�ϲ��a(b��)��������(y��ng)����Ҫ�O(sh��)��2-6���S���S����(sh��)���\(y��n)��ǰ���x���S̖���ٰl(f��)�Ͳ��a(b��)����@�Ӳ������a(b��)������l(f��)�e�S��
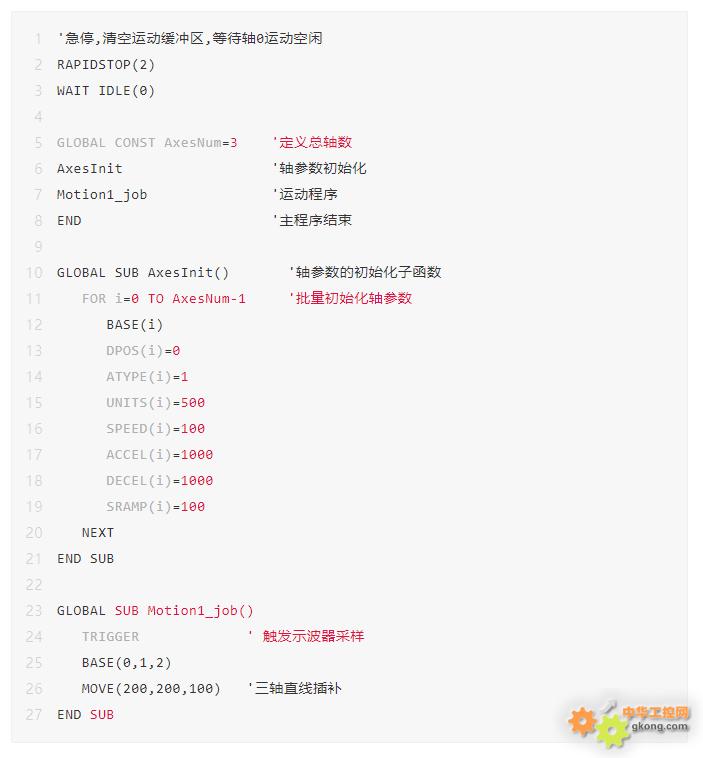
(3)���Sֱ�����a(b��)
BASE(0,1,2,3,4,5) '�x���S̖����Ҫ�Ďׂ��S�\(y��n)�Ӿ��x���Ďׂ�
MOVE(200,200,100,80,75,100) '�l(f��)��ֱ�����a(b��)����
4���M(j��n)�� ���Sֱ�����a(b��)�\(y��n)�ӺͱO(ji��n)��ʾ������N�\(y��n)��ģʽ��܉�E��
(1)�������Sֱ�����a(b��)�\(y��n)�ӳ���
(2)ʾ����XTģʽ�µ��\(y��n)��܉�E
(3)ʾ����XYģʽ�µ��\(y��n)��܉�E
(4)ʾ����XYZģʽ�µ��\(y��n)��܉�E
���Σ����\(y��n)�Ӽ��g(sh��)��(j��ng)��(j��)��EtherCAT�\(y��n)�ӿ�����(��)��ZBasic��(sh��)�F(xi��n)���Sֱ�����a(b��)�\(y��n)�ӣ��ͷ������@�
���ྫ�ʃ�(n��i)��Ո�P(gu��n)ע“���\(y��n)��С����” ����̖����Ҫ���P(gu��n)�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\(y��n)�Ӽ��g(sh��)�N�۹��̎���400-089-8936��
���������\(y��n)�Ӽ��g(sh��)ԭ��(chu��ng)���gӭ����D(zhu��n)�d����ͬ�W(xu��)��(x��)��һ������Ї���������ˮƽ�����°��(qu��n)�w���\(y��n)�Ӽ��g(sh��)���У������D(zhu��n)�dՈע������Դ��
���\(y��n)�Ӽ��g(sh��)��ע���\(y��n)�ӿ��Ƽ��g(sh��)�о���ͨ���\(y��n)�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g(sh��)��I(y��)�����\(y��n)�Ӽ��g(sh��)�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈ�(ji��n)��������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\(y��n)�ӿ��ƻ��A(ch��)���g(sh��)���о����LJ���(n��i)�����I(l��ng)��l(f��)չ������I(y��)֮һ��Ҳ�LJ���(n��i)���С����������\(y��n)�ӿ��ƺ��ļ��g(sh��)�͌�(sh��)�r����ܛ��ƽ�_���g(sh��)����I(y��)����Ҫ�I(y��)��(w��)�У��\(y��n)�ӿ��ƿ�_�\(y��n)�ӿ�����_EtherCAT�\(y��n)�ӿ��ƿ�_EtherCAT������_�\(y��n)�ӿ���ϵ�y(t��ng)_ҕ�X������__�\(y��n)�ӿ���PLC_�\(y��n)�ӿ���_�C(j��)���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\(y��n)�ӿ��ƿ��ȵȡ�