|
XPLC006E���ܺ���
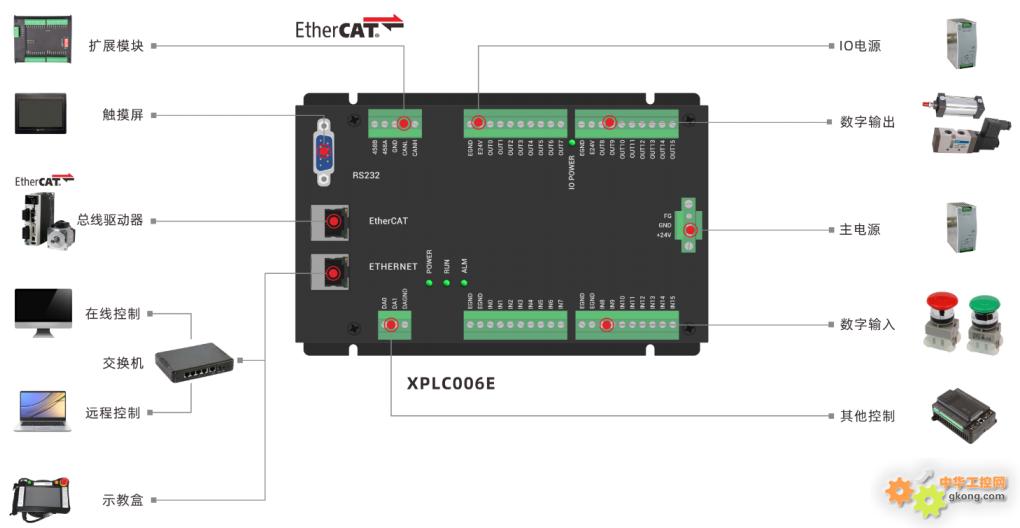
XPLC006E�����\���\�ӿ������Ƴ���һ����S������EtherCAT�����\�ӿ�������XPLCϵ���\�ӿ������ɑ����ڸ��N��ҪÓ�C��(li��n)�C�\�еĈ��ϡ�

XPLC006E�Ԏ�6��늙C�S�����12�S�\�ӿ��ƣ���̓�M�S��(sh��)����֧��12�Sֱ�����a�����݆������X݆��ͬ�����S��̓�M�S�O�õȹ��ܡ�
XPLC006E֧�ֶ��΄�ͬ�r�\�У�ͬ�r������PC��ֱ�ӷ����\�У����̷�ʽ��N���x��֧��ZDevelopܛ����Basic/PLC���ΈD/HMI�M�B(t��i)�ͳ�����λ�Cܛ�����̡�
XPLC006Eֻ֧��EtherCAT�����S����֧���}�_�S�;��a���S������EtherCAT�����c����ͨӍ��1ms��ˢ�����ڡ�
XPLC006E֧��PLC��Basic��HMI�M�B(t��i)���N���̷�ʽ��PC��λ�CAPI����֧��C#��C++��LabVIEW��VB��matlab��Qt��Linux��.Net��iMAC��Python�� ROS�Ƚӿڡ�

→�˿�aƷ��XPLC004E��XPLC006E��XPLC008E������ͬ�S��(sh��)����̖���x��
XPLC864E2���ܺ���
XPLC864E2��XPLC006E�Ĺ��ܻ��A���������������Ϲ�(ji��)��B��XPLC006E�Ĺ��ܶ�֧�֣��������YԴ���g��(y��u)��XPLC006E��ʹ�÷�������һ�£���֮ͬ̎����XPLC864E2��Ӳ��֧��32�cݔ�롢32�cݔ����2��ADC��2��DAC��֧���}�_�S�Ϳ����S���ʹ�ã������S�S��(sh��)��8�����ˎ�EtherCAT�ӿ�֮�⣬ݔ����Ӳ���Ͽ����Þ�8���S���}�_������̖ݔ�����펧��·���a��ݔ�룬����ݔ������á�
XPLC864E2֧��PLC��Basic��HMI�M�B(t��i)���N���̷�ʽ��PC��λ�CAPI����֧��C#��C++��LabVIEW��VB��matlab��Qt��Linux��.Net��iMAC��Python�� ROS�Ƚӿڡ�


һ��Ӳ������(sh��)�f��
1. ��������(sh��)

→ע��XPLCϵ�п�������Ҫ�p�Դ��늣����������Դ֮�⣬߀��Ҫһ��IO�Դ�oIO���ӹ�늣���tIO�o�����������dIOָʾ���鿴IO�Ƿ�ͨ늳ɹ���
2. ��������B(t��i)�鿴
�B�Ӻÿ��������������ͨ�^“������”→“��������B(t��i)”�鿴��ǰ�B�ӵĿ�������B(t��i)��
“��������B(t��i)”���@ʾ����������B(t��i)��Ϣ������������������Ϣ��ZCan��(ji��)�c��B(t��i)����λ��(ji��)�c��B(t��i)��ͨӍ���á���(ji��)�c��B(t��i)���@ʾ�B�ӵ��O����S��(sh��)����ʼIO��̖����Ϣ��

XPLC006E��������B(t��i)ʾ���D

XPLC864E2��������B(t��i)ʾ���D
������Ϣ�������̓�S��(sh��)�����늙C�S��(sh��)���΄Ք�(sh��)���ļ���(sh��)������Ĵ������g��С������������С���惦����С������������̖��ܛ���汾̖�c�r�g��IP��ַ��Ӳ���汾̖��������Ӳ��ID�Լ����S�Ͽ����õĵ���ͼ�ӳ��ȡ�
A.��������B(t��i)������Ϣ
- VirtualAxises��֧�����̓�M�S��(sh��)
- RealAxises��֧�����늙C�S��(sh��)
- Taskes������΄Ք�(sh��)
- Files/3Files������ļ�/�����ļ���(sh��)
- Modbus0x Bits��Modbusλ�Ĵ����Ñ����ÿ��g��С
- Modbus4x Regs��Modbus�ּĴ����Ñ����ÿ��g��С
- VR Regs��VR�Ĵ����Ñ����ÿ��g��С
- TABLE Regs��TABLE��(sh��)�M�Ñ����ÿ��g��С
- RomSize��Rom����
- FlashSize��Flash����
- SoftType��ܛ����̖
- SoftVersion��ϵ�y(t��ng)ܛ���汾+�̼��汾
- IpAddress��������IP��ַ
- HardVersion��Ӳ���汾
- ControllerID��������ΨһID
- Axis features list���S����б�
B.ZCan��(ji��)�c��Ϣ
�B�ӔUչģ�K֮���ڴ˴��ڲ鿴CAN�����ϵ����й�(ji��)�c��Ϣ����CAN����ʹ�ÿɲ鿴С�M���������£���Ԕ���f����
C.��λ0��(ji��)�c��Ϣ
ʹ��EtherCAT�����B�������O��֮������������Uչģ�K�����ڴ˴��ڲ鿴EtherCAT�����ϵ����й�(ji��)�c��Ϣ����EtherCAT����ʹ�ÿɲ鿴С�M���������£���Ԕ���f����
D.������ͨӍ����
�鿴CAN��Ϣ�cRS232/RS485/RS422��Ϣ��

E.ͨӍ�O���@ʾ��������
�˕rCANͨӍ���O�ã�CANIO_ADDRESS = 32,CANIO_ENABLE=1
�Y��CANIO_ADDRESS�cCANIO_ENABLE����Ϣ����֪�ԣ��˕r��������ZCAN Master��վģʽ��CAN����ͨӍ����500kbps��CANʹ�ܠ�B(t��i)��
������CANͨӍ���O�ã���CANIO_ADDRESS�cCANIO_ENABLE���P����(sh��)���ɡ�
Port0��RS232��ModbusSlave��B(t��i)����ַ1��VR�cMODBUS�Ĵ����ǃ�Ƭ�����^(q��)�g��
Port1��RS485��ModbusSlave��B(t��i)����ַ1��VR�cMODBUS�Ĵ����ǃ�Ƭ�����^(q��)�g��
��Ԕ���Ľ��Ո�鿴SETCOMָ�����P�ą���(sh��)�f����
3. Ӳ������(sh��)��ԃ
��������B(t��i)������ֱ�ӿ������Å���(sh��)���ھ�����ݔ��?*max�ܲ鿴ȫ��Ӳ������(sh��)��������XPLC006E������������̖��ԃ�����c��һ�¡�

- max_axis:12 �����S������S��(sh��)
- max_motor:6 �ɿص����늙C�S��(sh��)
- max_movebuff: 1024 ÿ���S�����S�M������\�Ӿ��_
- max_in:16,528 �������Ԏ�INݔ�낀��(sh��)�����֧��INݔ�낀��(sh��)
- max_out:16,528�������Ԏ�OUTݔ������(sh��)�����֧��OUTݔ������(sh��)
- max_ain:0,128 �������Ԏ�ģ�M��ݔ�낀��(sh��)�����֧��ģ�M��ݔ�낀��(sh��)
- max_aout:2,64 �������Ԏ�ģ�M��ݔ������(sh��)�����֧��ģ�M��ݔ������(sh��)
- max_pwm:0 PWMݔ������(sh��)
- max_slot:1 ��������(sh��)
- max_comport:2 ���ڂ���(sh��)
- max_ethport:3 �cPC��API����(sh��)�ľW��ͨӍ�B��
- max_ethcustom:2 �Զ��x�W��ͨӍ���B��
- max_ethiport:1 ���\�ӿ�������(li��n)��ͨ�ľW��ͨӍ�B��
- max_flashnum:128 FLASH�K��(sh��)
- max_flashsize:16384 ÿ��FLASH���g��С
- max_pswitch:32 ܛ��λ�ñ��^ݔ�����������(sh��)
- max_file:31 ϵ�y(t��ng)���֧�ֵ��ļ���(sh��)
- max_3file:0 ϵ�y(t��ng)���֧�ֵ������ļ���(sh��)
- max_task:10 �΄Ք�(sh��)
- max_timer:256 ���r������(sh��)
- max_loopnest:8 �Ȳ�ѭ�h(hu��n)�����x��ĴΔ�(sh��)
- max_callstack:8 �ӳ����{�õĶї��Ӕ�(sh��)
- max_local of one sub:16 SUB�ľֲ�׃����(sh��)
- max_vr:1024 VR�Ĵ������g����(sh��)
- max_table:160000 TABLE��(sh��)�M���g����(sh��)
- max_modbusbit:8000 MODBUS_BITλ�Ĵ������g��С
- max_modbusreg:8000 MODBUS_REG�ּĴ������g��С
- max_var:4096 ���֧��׃������(sh��)(��ȫ��׃���c�ļ�׃��)
- max_array:1024 ���֧�֔�(sh��)�M����(sh��)(��ȫ�֔�(sh��)�M�c�ļ���(sh��)�M)
- max_arrayspace:320000 ���Д�(sh��)�M�����Ŀ��g��С
- max_sub:1500 ���֧��SUB�ӳ���Ă���(sh��)
- max_edgescan:1024 ����֧�ֵ�������/�½��ؒ��肀��(sh��)
- max_lablelength:17 ��(sh��)�M�c׃�����Զ��x�ַ�������L��
- max_hmi:2,x:1024 y:800 ֧��2���h��HMI,���ߴ��1024*800
- SERVO_PERIOD:1000 min:1000 max:4000 ����������
- function support:Cam MultiMove ֧�ֵ��\�ӿ��ƹ���
�������̷�ʽ
XPLCϵ���\�ӿ�������Ҫ�Ñ������_�l(f��)���_�l(f��)�h(hu��n)���ɷ֞���һ��ʹ�����\�������аl(f��)��ZDevelop����ܛ���_�l(f��)������ʹ�ó��õ���λ�Cܛ���_�l(f��)��
1. ZDevelop����ܛ��
XPLCϵ���\�ӿ�����֧��ʹ��ZDevelop����ܛ�������N�����Z�ԣ�Basic/PLC���ΈD/HMI�M�B(t��i)�����N�Z��֮�g���Ի�Ͼ��̣������{�ã����N�Z�Եľ����փ���ZDevelop�ˆΙڵ�“����”���ٴ��_�ęn��
ʹ��ZDevelop����ܛ���ă�(y��u)���dz���������d��������Ó�C�\�У���(ji��)ʡ��λ�C�ɱ���ͬ�rZDevelop�ṩ���桢�{ԇ������(sh��)�O(ji��n)�صȹ��ܣ��o���͑��_�l(f��)���ӿ��Ŀ�M�ȡ�

2. ��λ�Cܛ��
������֧��Windows��Linux��Mac��Android��WinCE���N����ϵ�y(t��ng)�µ��_�l(f��)���ṩVC��C#��VB.net��LabVIEW�ȸ��N�h(hu��n)����dll�졣��λ�Cܛ�����̅�����ZMotion PC����(sh��)�쾎���փԡ���

ʹ��PC��λ�Cܛ���_�l(f��)�ij���o�����d����������ͨ�^dll�ӑB(t��i)���B�ӵ���������
ʹ��PC��λ�C���̷�ʽ�r��ͬ�r���Ԍ��������B��ZDevelop�M�бO(ji��n)���{ԇ�Ȳ�����
����Ӳ���Ӿ�
XPLC006E��ϵ�y(t��ng)�ܘ����£�

→ֻ֧��EtherCAT�����S���ƣ��}�_�S���ƽ��h�x��������̖��
�ġ�������ʹ������
��һ����Ӳ���Ӿ�
����������ϵ�y(t��ng)�ܘ��D���������Դ������������24Vֱ���Դ��늣������O�䡢IO�O�䡢�|�������Uչģ�K�ȡ�
�ڶ�����ϵ�y(t��ng)����
�O���ŷ������ą���(sh��)������PC�c�������B������Ĵ��ڻ�W�څ���(sh��)�ȡ�
���������B�ӿ�����
���ô��ڻ�W���B��PC�c������������ͨӍ�B�ӡ�
���IJ��������_�l(f��)
�x��һ�N�_�l(f��)��ʽ��ZDevelop����ܛ������λ�C�_�l(f��)�����������ľ����փԺ����̣�������
���岽�������{ԇ
���������d���������{ԇ�����ܣ����B��ZDevelop�^���{ԇ��r���]�п������Ĉ����B�ӵ��������{ԇ��
���������\���
�\�г����^��Ч����ʹ��ZDevelop����ܛ�������d����������ʹ��������λ�Cܛ���_�l(f��)�ij���ͨ�^�ӑB(t��i)���B�ӵ�������ʹ�ã��������յ�������(zh��)���\�ӿ��ơ�
�塢���È���
XPLCϵ���\�ӿ������V�������c����Ӱ댧�w�O�䣨�z�y��O�䡢�M�b��O�䡢�i����O�䡢���a�C�����c�z�O�䡢�ǘ��O�䡢ӡˢ���b�O�䡢�������b�O�䡢�t(y��)���O�䡢��ˮ���ȑ��È��ϡ�

���Σ����\�Ӽ��g������EtherCAT�\�ӿ�����(һ)�����ܺ����c���È������ͷ������@�
���ྫ�ʃ���Ո�Pע“���\��С����”����̖����Ҫ���P�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ��(chu��ng)���gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���aƷ���аl(f��)���LJ��Ҽ����¼��g��I(y��)�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈԳ�������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\�ӿ��ƻ��A���g���о����LJ��ȹ����I��l(f��)չ������I(y��)֮һ��Ҳ�LJ������С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I(y��)����Ҫ�I(y��)���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y(t��ng)_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\�ӿ��ƿ��ȵȡ�
|

