|
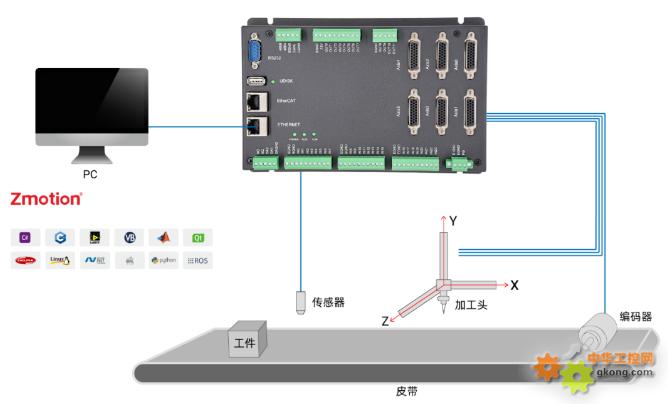
������Ҫ��B���ʹ��MOVESYNCָ����ٌ��F���S/���Sͬ�����S���ܣ��m����XYZ��R����SCARA��DELTA�ȳ�Ҋ�Cе�Y��������ˮ���c�z����ˮ���aƷ�֒�����ˮ���aƷ���\�Ȉ����ЏV�����á�
��x���ģ��W��ͬ�����S��ԭ���͌��F��������߹���Ч�ʣ�
01 ͬ�����S���ܽ�B
ͬ�����S����Ҫ�����ǿ��ٿ����\�әC�������F�a���ϮaƷ��ͬ�����S�����o�������\��ָ��F�a���aƷ��ץȡ���֒����c�z�ȹ�������
ͬ�����S�Ĺ�����Ҫ��MOVESYNCָ��F��ԓָ����Ñ�ͨ�^������ٌ��F���S����Sͬ�����S���ܣ����F��Ƥ��ץȡ�[�ţ�����ָ݆���һ�N��
1�����È����飺 ��ˮ���c�z����ˮ���aƷ�֒�����ˮ���aƷ���\�ȡ�
2����Ҋ�Cе�Y���� XYZ (R)��SCARA��DELTA�ȡ�

02 MOVESYNCָ���f��
1��ָ���B
ͬ�����S��ָ�c�ĸ��S�����S����λ�ã�Ƥ���c���S�S��λ��֮�g������ȥ�f�{λ���Pϵ����Ҫ̎���ăH�H�ǵ�һ�����S�r�̵�λ�á�
MOVESYNCָ�����Ҫ�����ǽo��Ƥ����λ�ú��S�S��λ�ã�ֻ��Ҫ�Ѹ��S�c���S���@��“�r��”�o�B��̎�����У�����������ɮ�Ƥ�������w���˂�����markλ�Õr��Ƥ��ֹͣ�ˡ�
���S�S�@���r���Ƅӵ��_�aƷmark�c���@���r�̵õ��˃ɽM����λ�ã�
��һ�M�� Ƥ����λ��syncposition��
�ڶ��M�� ���S�S��λ��pos1��ֻ��Ҫ���@�ɂ�λ�Ì������Mָ��ȼ��ɣ����ӕ��Ԅ�Ӌ��Ҏ������λ�ã����C���������oֹ��
2��ָ����Z��
MOVESYNC(mode,synctime,syncposition,syncaxis,pos1[,pos2, pos3…])
֧�ֆ��S����Sͬ�����S��
3��һ��ʹ����ʽ
base(0,1,2) //ָ�����cͬ�����S�S̖���@����0,1,2����
MOVESYNC (mode,���ٕr�g,syncposition,syncaxis,pos1,pos2, pos3) //���ٶ�
MOVESYNC(mode,ͬ���r�g,syncposition,syncaxis,pos1,pos2, pos3) //ͬ����
MOVESYNC(mode,�p�ٕr�g,syncposition,syncaxis,pos1,pos2, pos3) //�p�ٶΣ���λ�Σ�
һ�������ĸ��S�^�̷֞��������ӹ��^�ȼ����_���cƤ����ͬ���ٶȣ����F��ͬ���\�ӣ���ͬ������ɼӹ�������Ȼ��ӹ��^�ٻص��ȴ�λ�ã��ȴ���һ���|�l�ӹ����|�l�l�����Â������z�y���ϣ�ӛ䛁��ϵ�λ�ã�����MOVESYNCָ�
4��ָ����f��
��1��mode��ģʽ
���ٶκ�ͬ����һ��ʹ��ģʽ0��һ������X�S������S���p�ٶ�һ��ʹ��ģʽ-2�����ԏ��ƽY��ǰ��ĸ��S�\�ӣ���
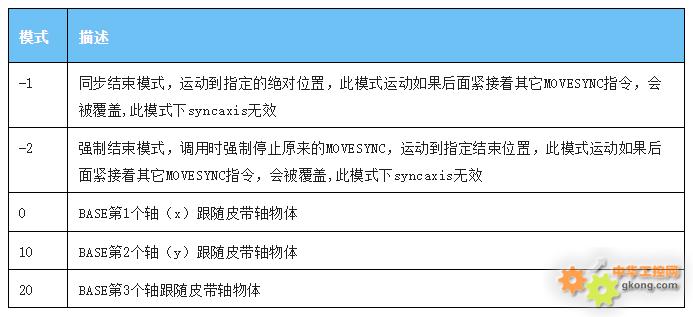
�e�f���� �����S�Įa���c�C�_���ڊA�Ǖrʹ��ģʽ0�����Ҽ��ϙC�_�c�a���ĊA�ǵĻ���ֵ���F���Sƫб�a��������
mode=0+angle��angle��Ƥ�����D�Ƕȣ��Ƕ�=Ƥ���cBASE��1/2�S���������D�A�ǡ����磺
�� Mode=PI/4��Ƥ����45�ȵķ���
�� Mode=PI/2��Ƥ����y����
�� Mode=PI��Ƥ����xؓ��
�� Mode=(PI*1.75)��Ƥ����-45�ȵķ���
��2��synctime��ͬ���r�g���r�g��λms��ͬ���r�gһ��֞�����
���ٶΕr�g��ô���C�_���S�S�����_���a���ٶȣ����Ҹ���Ŀ�ˮaƷ��0��ʾ�����\���S���ٶȼ��ٶȁ���Ӌͬ���r�g�����ܲ��ʴ_��һ�������O���L�c���_���܌��Fͬ����
ͬ���Εr�g��ʾ���S�aƷ�\�Ӷ��L�r�g��ץȡ�Ȅ����ڴ����g��ɣ�һ�������O���^�L�����C������ɣ�
�p�ٶΕr�g��ʾ��ûص�ָ��λ�ã�һ��p�ٶΕr�g�ͼ��ٶ�һ�ӣ����]ʹ��-2ģʽ��
��3��syncposition��Ƥ���S���w���Б����rƤ���S��λ��
�e�f���� ��ָ��֧��Ƥ���S����ѭ�h��������ָ��{�Õr�_���˅���λ�úͮ�ǰƤ���Sλ��֮�g�]�аl�������Ļ�ѭ�h��������˴�ָ���{�Õr��Ҫ������ѭ�h�c������
��4��syncaxis��Ƥ���S�S̖��-1��ʾ�]��Ƥ���S��������늙C�S��Ҳ�����Ǿ��a��
��5��pos1��Ƥ���S���w���Б����r��BASE��1���S��һ���Ǹ��S�S���Ľ^��λ��
��6��posn��Ƥ���S���w���Б����r��BASE��n���S�Ľ^��λ��
5��ָ��ʹ�ÈD�⣨���S������
movesyncָ��ֻ��Ҫ�o��ͬ�����S�|�l�r�Ďׂ��S��λ�Å������ɣ����醢��ͬ�����S�ėl�����ټ����_��ͬ��֮����мӹ���
���Ș�˼�һ�����Sģ�ͣ����£�
���O���aƷ��������λ�Õr���F���S����������������̖���FƤ��λ���i�棬�����aƷ���_�������i���λ�Õr�������i��ӛ���Ƥ�����ˣ�syncposition���������˕r�����S�SX�S�\�е��aƷ�i���cλ�ã��õ����S�SX�Sλ�Þ飨pos1����
�@�Ӿ͵õ���MOVESYNCָ�����������λ�ã���ͬ���r��Ƥ����λ�ã�syncposition�������S�S��λ�ã�pos1�����ٸ������H�\����rҎ�������ٶεĕr�g��ͬ���εĕr�g�͜p�ٶεĕr�g��ָ���\�м��Ɍ��Fһ��ͬ�����S�^�̡�
03 �����a
����ʾ���Ԇ��S���S�����ӣ��o���ԸБ�������λ��ӛ䛗l����
�ڛ]�ЙC�_����r�£����քӽo�i����̖��ģ�M�z�y�����ϣ�ӛ�ͬ���\��ָ��Ҫ���λ����Ϣ����HMI�������c���_ʼ����ͬ���\�ӣ��������Ҫ�����{���Pϵ���D��
����HMI������ڲ�����֧�����S�������`���{��ͬ�����S���A�εĕr�g��ͨ�^�ք��\�Ӳ������S�S���ȴ��|�lͬ���\�ӵ�λ�ã���ӛ������S�S�Į�ǰλ�ã�Ȼ��Ƥ���S���\�ӣ����\�����քӽo��������̖���|�lͬ���\�ӣ����S�S��MOVESYNCָ��Ŀ��������һ��ͬ�����S������
�����@ʾ��Ƥ���S���S�S��λ����Ϣ�����ҷ��������S�Ļ��A������ͬ���\�Ӽ��٣�ͬ���͜p�ٶεĕr�g��
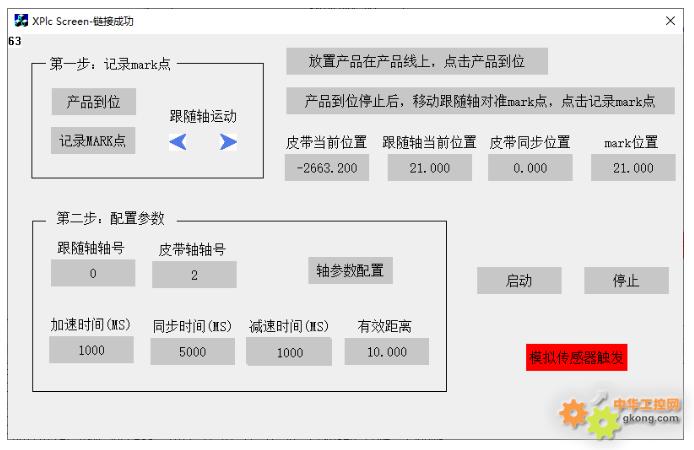
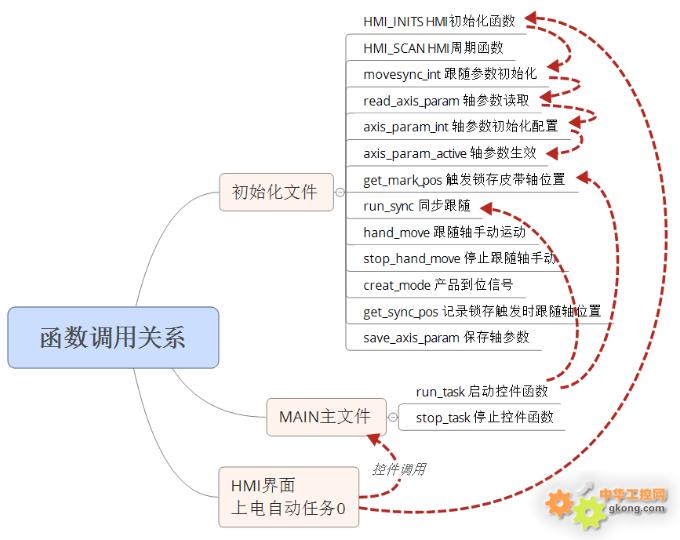
HMI�������E��
�� ��һ���\�У���Ҫ�M�Ќ�λ�������_�J���S�S��λ�ã��c���aƷ��λ��ģ�M�aƷ�ŵ��˂��͎����_ʼ�\�ӣ����_�i��λ��ֹͣ�������S�S�Ƅӵ��aƷλ��̎ͣ�¡�ӛ��¸��S�S�˕r�����ˣ�������MOVESYNCָ����õ� ��
�� �����S̖���S���\�Ӆ����������O�������\�ӵĕr�g ��
�� �c�ӣ����͎��\�У�ͨ�^ģ�M��̖�o���ϙz�y��̖���|�l�i��ó�Ƥ���S���ˣ��|�lͬ�����S�_ʼ��
ע�⣺ ����������õ���Ӳ���i�湦�ܣ���Ҫ�ڿ�����ƽ�_�\�У��]�Ђ������r�����Ԍ�OUT�ڶ̽ӵ�IN�ڣ�ͨ�^OPָ��ģ�M�������i����̖��ݔ�룬ʾ����OUT0����IN0��
�i�溯���� �����i��������z�y���ϣ��|�lͬ�����S�\�ӣ��i�湦��ӛ��_ʼ���S�r���i��Ƥ���Sλ�ã�ӛ��®�ǰͬ���S��λ����Ϣ������MOVESYNCָ�����
global sub get_mark_pos(mode) 'ʹ��3����4��������ʽ�ĵȴ��l���ͫ@ȡ�Ĕ����Ĵ�����reg_pos
REG_INPUTS(belt_axis) = $0000 'ӳ��Ƥ���i��ݔ��
reg_count = 0
DMSET mark_flag(0,100,-1) 'ÿ���_ʼǰ���־�������`��
WHILE 1
base(belt_axis)REGIST(mode)axis(belt_axis)
wait until mark
if reg_count >= 100 then 'λ�Ô��Mѭ�h�惦ֵ�Д�
reg_count = 0
endif
mark_pos(reg_count) = REG_POS
?REG_POS
mark_flag(reg_count) = 1
reg_count = reg_count + 1
wend
endsub
ͬ�����S������ �����i�溯���o�ą������O�ø��S�r�g������ͬ�����S�������֞���١�ͬ���͜p�ٻ�ԭλ�������A�Σ�ע��ÿ���A�εĕr�gҎ�����������һ�����S���E֮��ȴ��|�l��һ�θ��S��
global sub run_sync()
base(sync_axis)
move_count = 0 '�\��Ӌ����0
TABLE(10) = -1 '��table 10 ��ֵ������ͬ���Y����־
WHILE 1
if move_count >= 100 then 'ѭ�h
move_count = 0
endif
if mark_flag(move_count) = 1 then '�Д��Ƿ��ЮaƷ�|�l
if abs(sync_star_dis + mark_pos(move_count)) >= abs(mpos(belt_axis)) then '������Ч�|�l���x�ȣ������Ը��S
'�_ʼ���S
'��һ�Σ����ٶΣ��s�Σ� ���Sģʽ���C�����w������һ��Ƥ�����a�������c���S�S�\�ӷ���һ�¾���0 ��������� 0 + pi/2
MOVESYNC(0, accel_time, mark_pos(move_count), belt_axis, sync_pos)
'�ڶ��Σ�ͬ�����c���ٶ�Ψһ��ͬ�Ǖr�g
MOVESYNC(0, sync_time, mark_pos(move_count), belt_axis, sync_pos)
'��̎�����_������ȥ������������
'ʹ�� move_task ָ�����
'��table 10 ��ֵ�����������\�ӵĽY����־,�@��ʹ��move_table���Ǟ���ʹͬ����ȫ�Y���������_�l�r���Ԍ�MOVE_TABLE���������\�ӵľ�������ʹ��
MOVE_TABLE(10,10)
elseif abs(sync_star_dis + mark_pos(move_count)) < abs(mpos(belt_axis)) then '����������ֱ�����^��
TABLE(10) = 10
?"���^"
'?abs(sync_star_dis + mark_pos(move_count)) , abs(mpos(belt_axis))
endif
'��Y��
wait UNTIL table(10) = 10
'�����Σ���λ�� �Ԯ�ǰλ�Þ�ֹͣλ�ã���������׃���O�ô��Cλ��
MOVESYNC(-1, decel_time, mark_pos(move_count),-1, sync_pos)
move_table(10,-1) '�Y����־��λ
mark_flag(move_count) = -1 'ͬ���l����־��λ
move_count = move_count + 1 'Ӌ��+ 1
endif
wend
endsub
04 �\����
���S�S���S0�����SƤ�����S2���\�ӵ��ٶ����������ٶΣ�ͬ���Σ��p�ٻ����c��
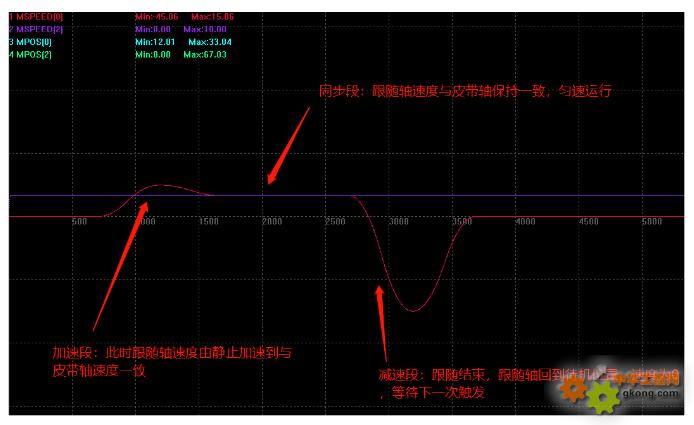
���S�S���S0�����SƤ�����S2���\�ӵ�λ��������
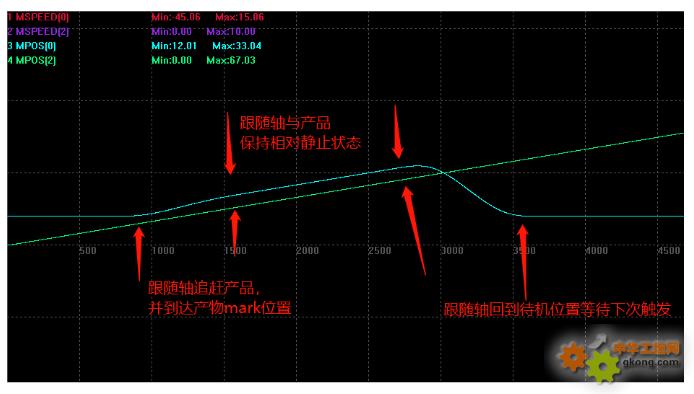

���Σ����\�Ӽ��g�\�ӿ����� ��ο��ٌ��F���S/���Sͬ�����S���ܣ� �ͷ������@�� ��
���ྫ�ʃ���Ո�Pע“ ���\��С���� ”����̖����Ҫ���P�_�l�h���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���aƷ���аl���LJ��Ҽ����¼��g��I�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă����˲ţ��ڈԳ��������µ�ͬ�r���e�O�ϸ����У�fͬ�\�ӿ��ƻ��A���g���о����LJ��ȹ����I��lչ������I֮һ��Ҳ�LJ������С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I����Ҫ�I���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\�ӿ��ƿ��ȵȡ�
|

