|
���������\(y��n)�Ӽ��g(sh��)�߂䌣����݆�ӿڵ��\(y��n)�ӿ�����ZMC408CE��������B��݆����݆�����ü�ԭ������������݆�ӿڽӾ��Լ���݆�������á�
01 ��݆���ü�ԭ��
��݆Ҳ�Q�֓u�}�_�l(f��)��������Ҫ���ڔ�(sh��)�ؙC(j��)�������w�ӹ����ġ��Pʽ�ӹ����ġ����T�ӹ����ĵȔ�(sh��)���O(sh��)�䡣��(d��ng)��݆���D(zhu��n)�r(sh��)�����a���a(ch��n)���c��݆�\(y��n)��������(y��ng)����̖��ͨ�^��(sh��)��ϵ�y(t��ng)�x������(bi��o)��������(bi��o)�M(j��n)�ж�λ��
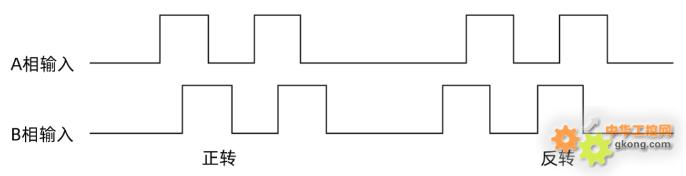
�ք��}�_�l(f��)�������������S�Ĺ�늴a�P�������Эh(hu��n)��ͨ�����Ŀ̾����u����݆���ɹ�늰l(f��)��ͽ��������xȡ���@��2�M���Ҳ���̖HA��HB��ÿ��(g��)���Ҳ����90����λ� ����HA��HB����̖���90�ȣ���ͨ�^A����ǰ߀��B����ǰ���o�����D(zhu��n)�}�_���D(zhu��n)�}�_ȥ�����ŷ�늙C(j��)���D(zhu��n)���D(zhu��n)��
02 ��݆��B
1. ͨ�^��݆�ϵ�“�S�x�����o”�x����Ҫ�Ƅӵ�����(bi��o)�S��
2. ͨ�^“�����x�����o”�x����m���Ƅӱ���×1/×10/×100����
3. ���D(zhu��n)“��݆�u��”�Ƅ�����(bi��o)�S��형r(sh��)����D(zhu��n)�������Ƅӣ���r(sh��)����D(zhu��n)��ؓ(f��)���Ƅӣ����D(zhu��n)�ٶȿ������Կ�������(bi��o)�S���\(y��n)���ٶȣ�
4. ���o“��ͣ”���o��ֹͣ��݆�\(y��n)�ӣ�
5. ��������݆ �ӿڞ��p�Ř�(bi��o)��(zh��n)DB15ĸ�^����Ҫ��݆���^�� �p�Ř�(bi��o)��(zh��n)DB15���^��


��݆�ӿڈDʾ
03 ��������݆�ӿڽӾ�
1.Ӳ����B
��������ZMC408CE�\(y��n)�ӿ��������߂䌣�õ���݆�ӿڡ�

ZMC408CE�����\(y��n)�Ӽ��g(sh��)�Ƴ���һ�������EtherCAT�����\(y��n)�ӿ����������ļ��g(sh��)���������M(j��n)��FPGA���g(sh��)����(sh��)�F(xi��n)Ӳ��λ�ñ��^ݔ��������(zh��n)ݔ�����ܣ����C�B�m(x��)܉�E�ӹ��ij�ɫ���ܺͷ�(w��n)���ԣ��Լ��ӑB(t��i)��(sh��)��(j��)���@�Č�(sh��)�r(sh��)�ԣ��Ķ���(sh��)�F(xi��n)���Ӿ���(zh��n)���ƺ�������a(ch��n)Ч�ʺ�Ʒ�|(zh��)��
ZMC408CE֧��EtherCAT�����S + �}�_�S��ϲ��a(b��)����Ó�C(j��)��(li��n)�C(j��)�\(y��n)�У��ɿ�늙C(j��)�S��(sh��)8�S��������̖�ṩ16��32�S���x��֧��ZDevelop + ��N����λ�C(j��)��Ͼ��̣����Ԍ�(sh��)�F(xi��n)�c(di��n)λ�\(y��n)�ӡ����݆��ֱ�����a(b��)���A�����a(b��)���B�m(x��)܉�E�ӹ���30+�N�C(j��)����ģ�͵Ŀ��ơ�
ZMC408CE�a(ch��n)Ʒ���c(di��n)
1.������̎�����������\(y��n)���ٶȡ�푑�(y��ng)�r(sh��)�g�͒������ڵȣ�
2.һ�S/���S/���S����ͨ��ҕ�X�w�ģ����ٸ߾���
3.λ��ͬ��ݔ��PSO���B�m(x��)܉�E�ӹ��Ќ������c(di��n)�z�z�����ƺͼ����������Ƶȣ�
4.���Sͬ�����ƣ�������(bi��o)ϵ��(d��)�����Ƶȣ�
5.EtherCATͬ�����ڿɿ���125us��
6.EtherCAT�������}�_�S��ϲ��a(b��)��
7.ֱ�����a(b��)��������g�A�����a(b��)���������a(b��)���ӗl���a(b��)�ȣ�
8.��(y��ng)���`���PC��λ�C(j��)�_�l(f��)��Ҳ��Ó�C(j��)��(d��)���\(y��n)�� ��
ZMC408CEҕ�l��B
2.��������݆�ӿ�MPG���x
3.��݆�Ӿ�����
4.ע�����(xi��ng)
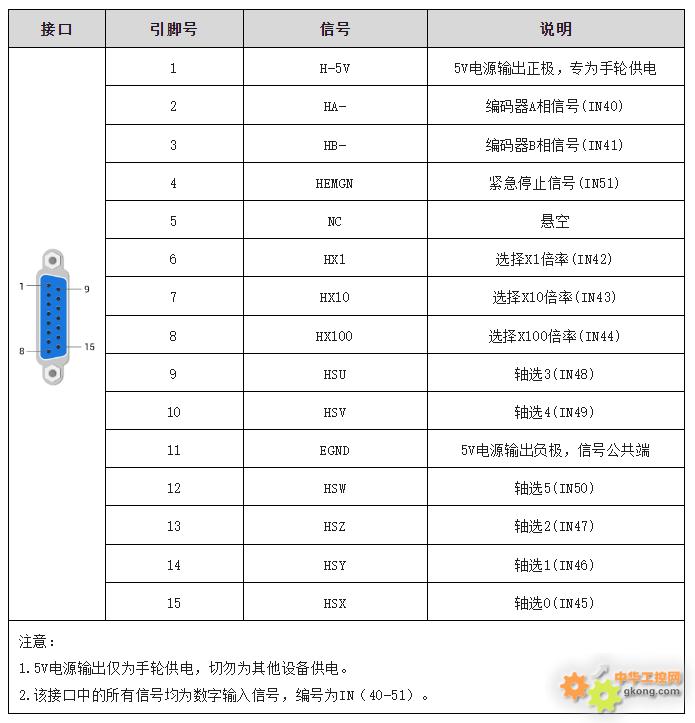
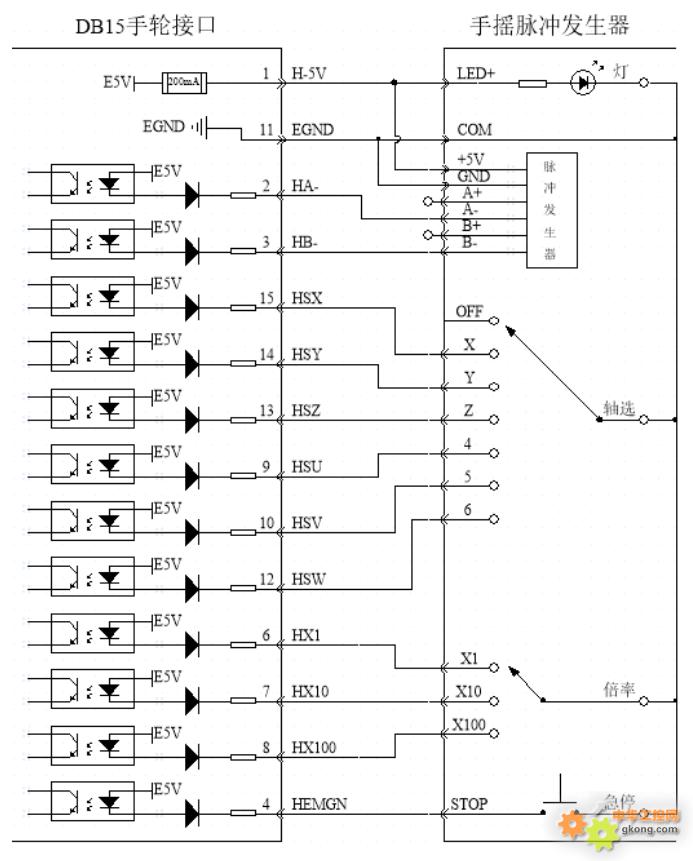
��݆���a���S�ӿڽӾ�ԭ�����ψD��ʾ����݆�S�ҵ��O(sh��)Ӌ(j��)��N���ӣ�Ո�Ȳ鿴��݆��(n��i)�����O(sh��)Ӌ(j��)�D���c�\(y��n)�ӿ������_�J(r��n)���_��֔(j��n)���Ӿ���Ոʹ���p�g���ξ��������ǭh(hu��n)�����ӵĈ��ϣ���(w��)��ʹ���Όӳ�ֽӵء�
04 ��������
1.����������݆�Ӿ�ʾ��D���_�B����݆�Ϳ�������
2.��늺�Ո�xEtherNET��RS232��RS485��һ�N�ӿ��B��ZDevelop��
3. �����S̖��ԓ��������݆�ӿڟo����Ĭ�J(r��n)AXIS�S̖��ӳ������_�}�_�S̖��������M(j��n)����ӳ�䣬�������E���£�

4. ����IO������(j��)��Ҫ�x���S�x��HSX��HSY��HSZ��HSU���ͱ��ʣ�HX1��HX10��HX100���Լ��o��ֹͣ��HEMGN�����ܣ��@Щ��̖���|(zh��)�锵(sh��)��ݔ����̖���й̶��ľ�̖����Ҋ�Ϲ�(ji��)�� �����o�̶��Ĺ��ܣ���ҪZDevelop�_�l(f��)�������Q�����]���õĹ��ܣ��S�x����CONNECTͬ���\(y��n)�ӵı��B���S�����ʼ�CONNECT���ʡ�
5.����������ü����_ʼʹ����݆��
����ʾ�����£��\(y��n)���·������Ɍ�(sh��)�F(xi��n)��݆�Ŀ��ơ�
'��ͬ��������̖����݆�S̖�����ʺ��S�x��IN��̖��һ�ӣ�����������ʹ���փԣ�������ʹ�ÿ�������̖��ZMC408CE
'��ͬ��݆�����S��(sh��)��һ�ӣ������̿����S��(sh��)��6��(g��)
'�S̖�O(sh��)��
global const axis_X = 0 'X�S
global const axis_Y = 1 'Y�S
global const axis_Z = 2 'Z�S
global const axis_U = 3 'U�S
global const axis_V = 4 'V�S
global const axis_W = 5 'W�S
global const def_R = 8 '��݆Ĭ�J(r��n)�S̖
global const axis_R = 10 '��݆����ӳ���S̖
'����IN��̖�O(sh��)��
const io_Handlow = 42 '1����
const io_Handmid = 43 '10����
const io_Handhigh = 44 '100����
'�S�x��IN��̖�O(sh��)��
const io_HandX = 45 '��݆X�S
const io_HandY = 46 '��݆Y�S
const io_HandZ = 47 '��݆Z�S
const io_HandU = 48 '��݆U�S
const io_HandV = 49 '��݆V�S
const io_HandW = 50 '��݆W�S
'�o��ֹͣ��̖IN��̖�O(sh��)��
const io_HandEMGN = 51 '��ͣ
global dim conflag '��݆�B���S��(bi��o)ӛ
conflag = -1
ATYPE(def_R) = 0 '߀ԭ�S 8 �S���
ATYPE(axis_R) = 0 '߀ԭ�S 10 �S���
AXIS_ADDRESS(axis_R) = (-1<<16)+ def_R '�� MPG ���}�S��ַӳ�䵽�S 10
ATYPE(axis_R) = 3 '�O(sh��)�����}�S�S��͞��������a�����
UNITS(axis_R) = 1 '�O(sh��)�����}�S�}�_��(d��ng)���}�_���λ
While 1
if in(io_handX) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_X) '朽ӵ��SX, ���� 1
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_X) '朽ӵ��SX, ���� 10
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_X) '朽ӵ��SX, ���� 100
endif
conflag = axis_X
elseif in(io_handY) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_Y)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_Y)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_Y)
endif
conflag = axis_Y
elseif in(io_handZ) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_Z)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_Z)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_Z)
end if
conflag = axis_Z
elseif in(io_handU) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_U)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_U)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_U)
endif
conflag = axis_U
elseif in(io_handV) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_V)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_V)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_V)
endif
conflag = axis_V
elseif in(io_handW) = on then
if in(io_handlow) = on then
connect(1, axis_R) axis(axis_W)
elseif in(io_handmid) = on then
connect(10, axis_R) axis(axis_W)
elseif in(io_handhigh) = on then
connect(100, axis_R) axis(axis_W)
endif
conflag = axis_W
elseif conflag <> -1 then 'ȡ���B��
cancel(2) axis(conflag)
conflag = -1
elseif in(io_HandEMGN) = off then
RAPIDSTOP(2)
endif
Wend
���Σ����\(y��n)�Ӽ��g(sh��) EtherCAT�\(y��n)�ӿ������ڔ�(sh��)�ؼӹ���݆�S���еđ�(y��ng)�ã� �ͷ������@�� ��
���ྫ�ʃ�(n��i)��Ո�P(gu��n)ע“ ���\(y��n)��С���� ”����̖����Ҫ���P(gu��n)�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\(y��n)�Ӽ��g(sh��)�N�۹��̎���400-089-8936��
���������\(y��n)�Ӽ��g(sh��)ԭ��(chu��ng)���gӭ����D(zhu��n)�d����ͬ�W(xu��)��(x��)��һ������Ї���������ˮƽ�����°��(qu��n)�w���\(y��n)�Ӽ��g(sh��)���У������D(zhu��n)�dՈע������Դ��
���\(y��n)�Ӽ��g(sh��)��ע���\(y��n)�ӿ��Ƽ��g(sh��)�о���ͨ���\(y��n)�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g(sh��)��I(y��)�����\(y��n)�Ӽ��g(sh��)�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈ�(ji��n)��������(chu��ng)�µ�ͬ�r(sh��)���e�O(li��n)�ϸ����У�f(xi��)ͬ�\(y��n)�ӿ��ƻ��A(ch��)���g(sh��)���о����LJ���(n��i)�����I(l��ng)��l(f��)չ������I(y��)֮һ��Ҳ�LJ���(n��i)���С����������\(y��n)�ӿ��ƺ��ļ��g(sh��)�͌�(sh��)�r(sh��)����ܛ��ƽ�_���g(sh��)����I(y��)����Ҫ�I(y��)��(w��)�У��\(y��n)�ӿ��ƿ�_�\(y��n)�ӿ�����_EtherCAT�\(y��n)�ӿ��ƿ�_EtherCAT������_�\(y��n)�ӿ���ϵ�y(t��ng)_ҕ�X������__�\(y��n)�ӿ���PLC_�\(y��n)�ӿ���_�C(j��)���˿�����_ҕ�X��λ_XPCIe/XPCIϵ���\(y��n)�ӿ��ƿ��ȵȡ�
|

