|
������Ҫ��B���\�Ӽ��gEtherCAT��������VSƽ�_����C++�Z�Ԍ��F�ĸ��NPSO���ܡ����\���ṩ��NPSOģʽ���Ñ����䲻ͬ�Ĉ���ʹ�á�
�Ϲ��v���˲���TABLE�Ĵ����惦�Ĕ������|�l���^��������Ҫ�v��ʸ�����^�ɷNģʽ���Ⱦ����ڱ��^ݔ�����̶��r�g���ڱ��^ݔ����
�������ڱ��^ģʽ�����S���S���^ģʽ��Ҋ��һ���f����
01 Ӳ����B
ZMC408CE�����\���Ƴ���һ����S������EtherCAT�����\�ӿ�����������EtherCAT��EtherNET��RS232��CAN��U�P��ͨӍ�ӿڣ�ZMCϵ���\�ӿ������ɑ����ڸ��N��ҪÓ�C���C�\�еĈ��ϡ�
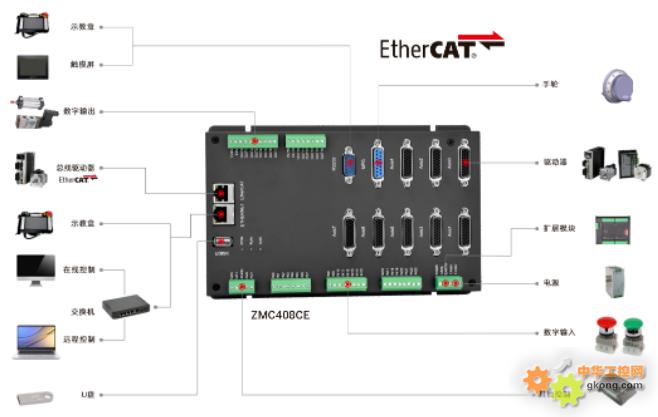
ZMC408CE֧��8�S�\�ӿ��ƣ����ɔUչ��32�S��֧��ֱ�����a������A�����a�����g�A�����������a�����݆������X݆��ͬ�����S�ȹ��ܡ�
ZMC408CE֧��8�S�\�ӿ��ƣ��ɲ����}�_�S�������a����������EtherCAT�����S��ͨ��IO����24��ݔ��ں�16��ݔ���ڣ�����IO�����IO��EtherCAT���100us��ˢ�����ڡ�
ZMC408CE֧��8��ͨ����Ӳ�����^ݔ����Ӳ�����r�����\���о���ݔ����߀֧��8ͨ��PWMݔ����������ݔ���ڞ�OUT0-7��֧��8��ͨ��ͬ�r�|�lӲ�����^ݔ�������ڶ�ͨ����ҕ�X�w�Ĉ��ϵȡ�
ZMC408CE֧��PLC��Basic��HMI�M�B���N���̷�ʽ��PC��λ�CAPI����֧��C#��C++��LabVIEW��Matlab��Qt��Linux��VB.Net��Python�Ƚӿڡ�

ZMC408CE���ø߾���PSOλ��ͬ��ݔ�����ܣ��ڼӹ��A���c�����r��ʹ�M���Мp���{�����ڸ��ټӹ��Ĉ�����Ҳ�ܿ��Ƽ���ݔ���ĵ��g��ݔ����
02 PSO���g��B
PSO��position synchronized output����λ��ͬ��ݔ�������|��ͨ�^�ɼ����r�ľ��a������λ��(�o���a����ʹ��ݔ�����}�_λ��)�c���^ģʽ�O����λ���M�б��^������OP����ͬ��ݔ����̖��PSOʾ��D���¡�
PSOһ���c������(���c�z�����y���O��)ͬ��ݔ����̖�M����λͬ�������\��܉�E�������A���Ժ㶨�Ŀ��g(��㶨�r�g)�g���|�lݔ���_�P���������١��p�ٺ̈́��ٶΣ��Ķ����F�}�_��������������ڱ��ӹ����w�ϡ�
PSO���ܵ����c���ܸ����ҷ�����ݔ����̖�����ݔ���������ߣ������܉��������\��܉�E���Թ̶��ľ��x�|�lݔ����̖�����ÿ��]���w�ٶȣ�����ֱ�������Ժܿ���ٶ��\�ӣ����ڈA�Dz��֜p�ٵ�ͬ�rҲ�ܱ��Cݔ���g��㶨��
ͨ���A�Ǽӹ������������ӹ��^����ռ�б��^С�IJ��֣��@���ڱ��C�ӹ�Ч����ͬ�r���Ϳ�������ȵ���߮a�ܡ�
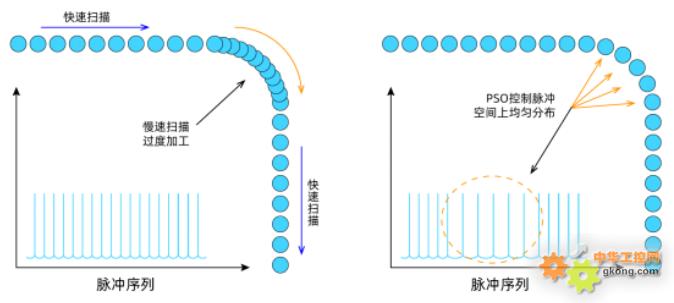
���\�ӵ�PSO�����{��ZAux_Direct_HwPswitch2�����ӿڌ��F��ԓ��������Ӳ�����FIO�ĸ��ٱ��^ݔ����푑��ٶ��_���뼉�e������Ӳ�����^ݔ����
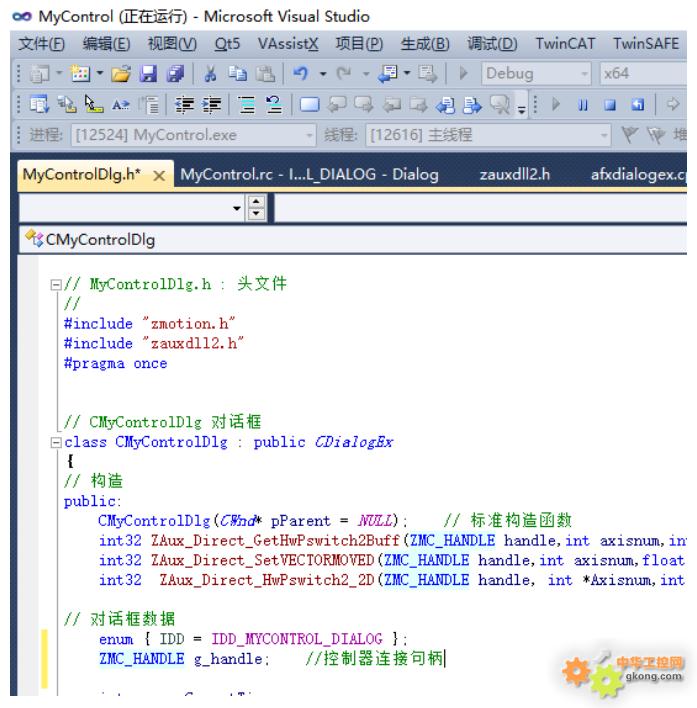
03 C++�Z��MFC�M���\�ӿ����Ŀ���_�l
��һ���½�MFC�Ŀ�����Ӻ�����
ע����������VS2010���g�h���£�����.NET Framework 4.0��܄�����MFC���w���ó���
1.���ߙڲˆ�“�ļ�”→“�½�”→“�Ŀ”�����ӄ����Ŀ��
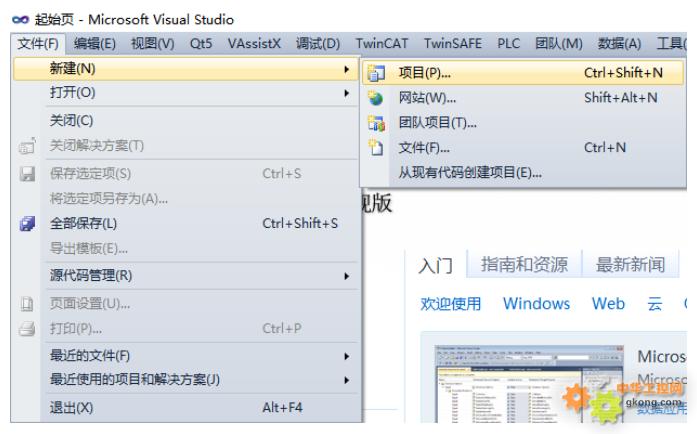
2.�x���_�l�Z�Ԟ�“Visual C++”��.NET Framework 4�Լ�MFC���ó�����ó������Լ��x��ó�����·�����c���_����
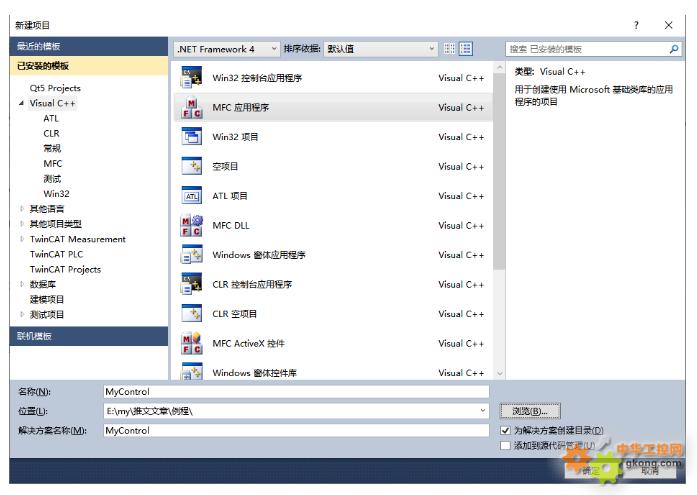
3.�c����һ����

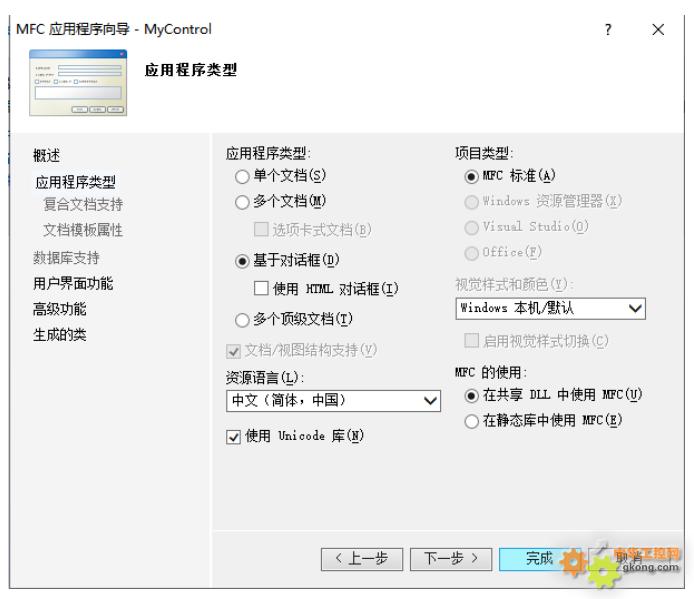
4.�x����͞�“���ڌ�Ԓ��”���c����һ��������ɼ��ɡ�
�������ҵ��S���ṩ��C++�������ļ�
1.�M��S���ṩ�Ĺ�P�Y�ϣ��ҵ�“8.PC����”�ļ��A�����c���M�룬�ҵ�C++�����죬·�����£�64λ���������

2.�x��“������2.1”�ļ��A��

3.�x��“Windowsƽ�_”�ļ��A��
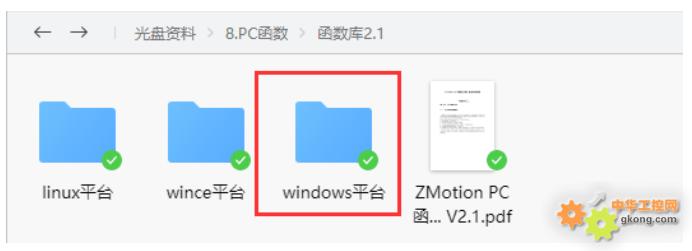
4.������Ҫ�x���ĺ����죬�@���x��“64λ��”��

5.�≺C++���s����������C++�����ĺ����졣

6.��������w·�����¡�
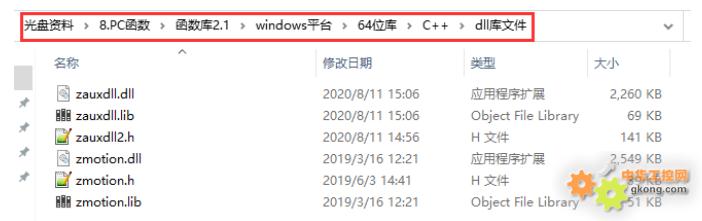
7.���S���ṩ��C++���ļ��Լ����P�ļ����Ƶ��½����Ŀ�С�
���������Ŀ�������o�B������P�^�ļ�
�o�B�죺zauxdll.lib, zmotion.lib
���P�^�ļ���zauxdll2.h, zmotion.h
1.���ғ��^�ļ������������x��:“����”→“�F���”��
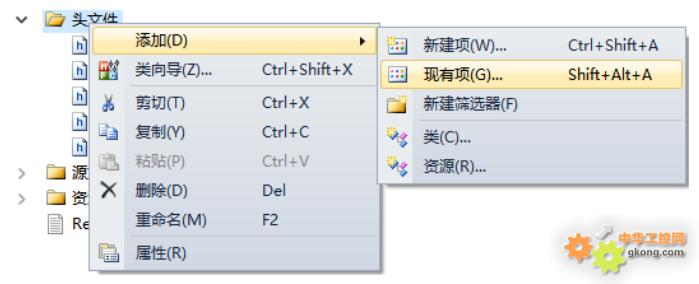
2.�ڏ����Ĵ��������������o�B������P�^�ļ���
3.���õ����^�ļ��Ͷ��x�������B�Ӿ����
���ˣ��Ŀ�½���ɡ�
���ģ��鿴PC�����փ�
�Ñ���Ҫ��PC�����փ��Ы@ȡ�\�ӿ����_�lʹ�õĺ����ӿڣ������փ��f��ʹ�ã�PC�����փ��ڹ�P�Y�ϲ鿴�����w·�����£�“��P�Y��\8.PC����\������2.1\ZMotion�����쾎���փ�V2.1.pdf”��
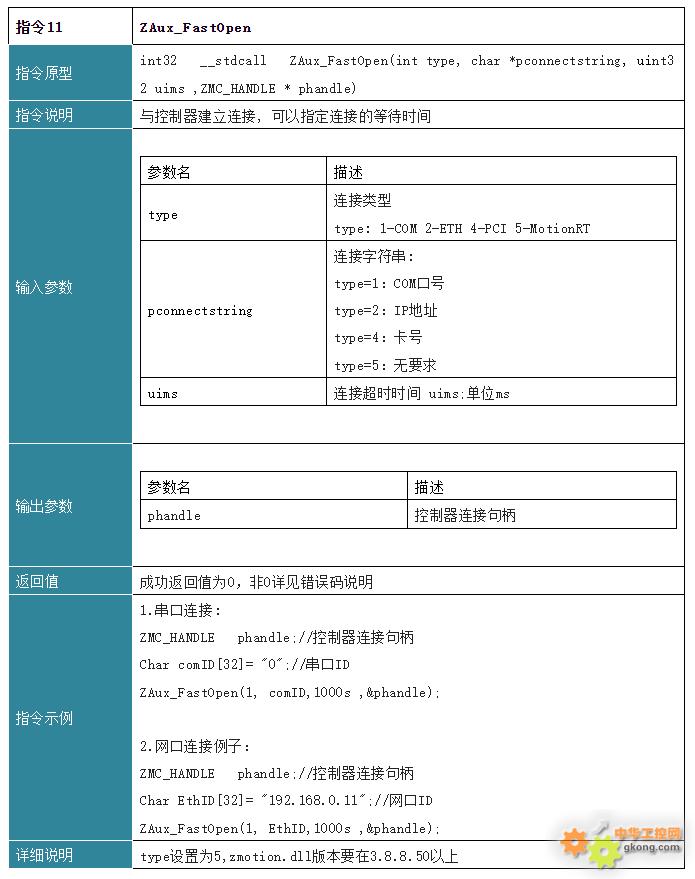
���壩�������W���B�Ӻ����ӿ�
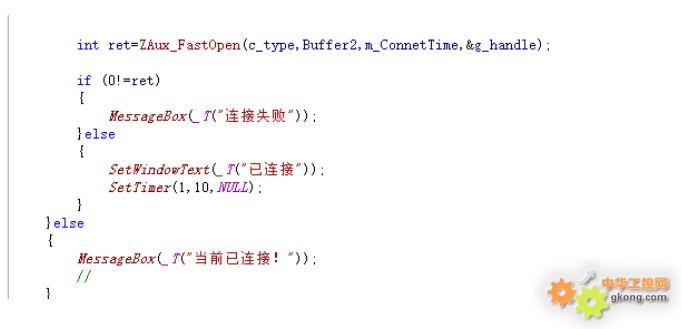
PC����һ��ʹ�þW�ڌ����������ؙC�M��朽ӡ�ZAux_FastOpen���������朽ӳɹ���ԓ�ӿڕ�����һ��朽Ӿ����ͨ�^�����@��朽Ӿ�����Ԍ��F���������Ŀ��ơ�
ZAux_OpenEth()�ӿ��f����
�Ŀ���ý؈D��
������Ӳ�����^ݔ�������ӿ�
ʹ�Ì���λ�C�Ĵ���������ָ�����朽Ӿ��“g_handle”�����������M�мĴ�������ȡֵ�����r������λ�C���P��ָ�����¡�
���rȫ��׃��ָ�ZAux_Direct_HwPswitch2Ӳ�����^ݔ��ָ�λ�ú�Ӳ���Ԅ��|�lopݔ����̖��
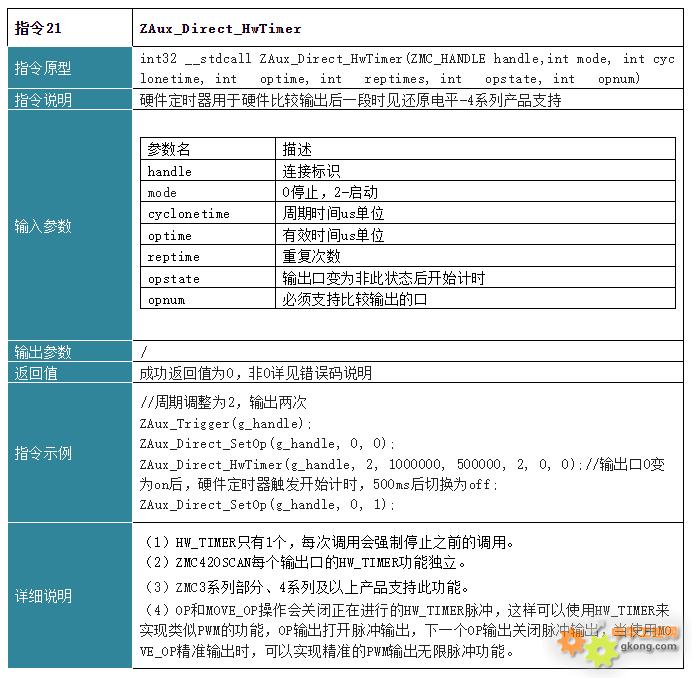
���ߣ�Ӳ�����r�������ӿ�
ZAux_Direct_HwTimerӲ�����r��Ӳ�����^ݔ����һ�Εr�g߀ԭ�ƽ��
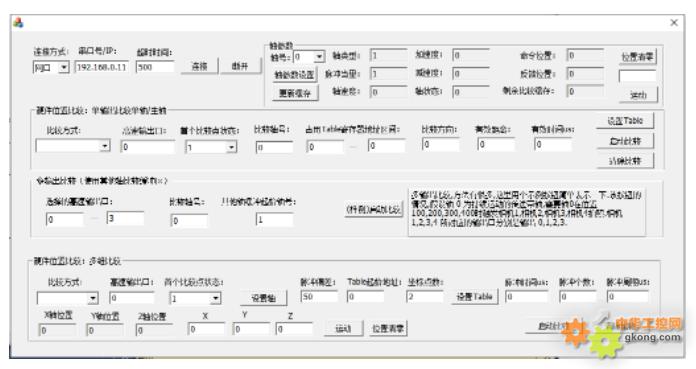
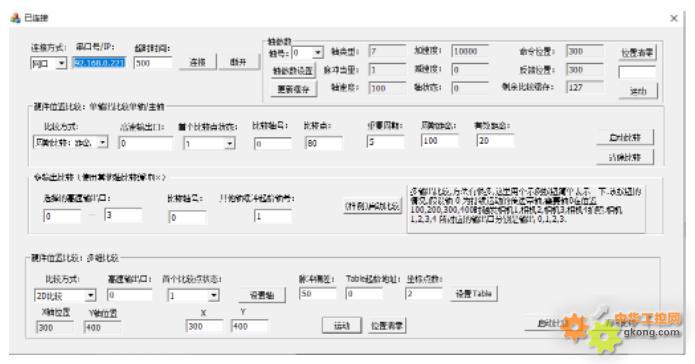
04 MFC������\��x�������_�l
��һ��Demo������������
���������̹��ܽ�B
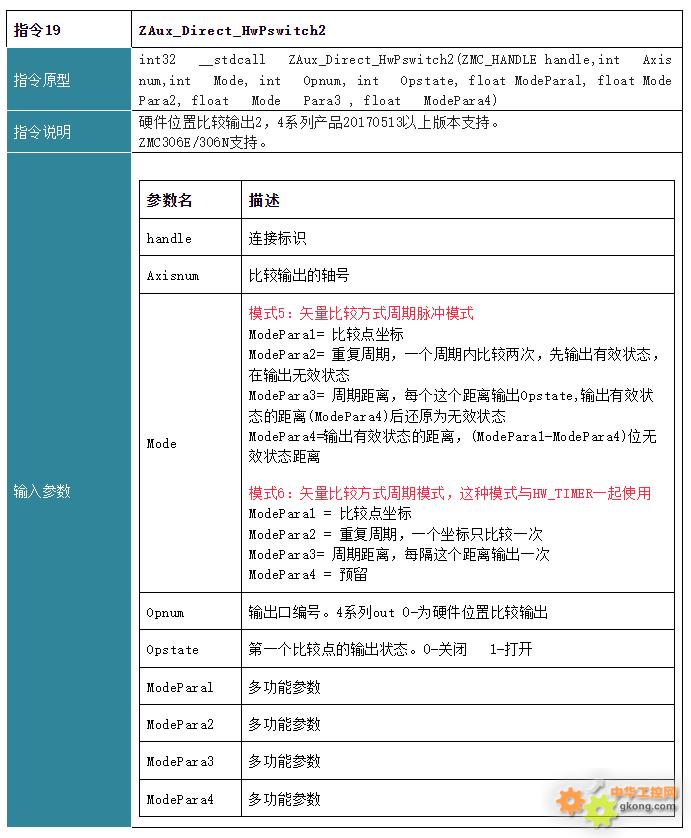
1.ʸ�����^�����ھ��x�}�_��ģʽ5��
ZAux_Direct_HwPswitch2��ZMC_HANDLE handle��int Axisnum��int Mode��int Opnum��int Opstate��float ModePara1�� float ModePara2��float ModePara3��float ModePara4��
��1��handle���������B�Ӿ��
��2��Axisnum�����^�S̖
��3��Mode��5-���ӱ��^��
��4��Opnum��������ݔ����
��5��Opstate����һ�����^�c��ݔ����B���J������Ч��B����֮�J��oЧ��B
��6��Vectstart:���^�cVECTOR_MOVED��ǰ�\�Ӿ��x
��7��Repes���؏����ڣ�һ�����ڃȱ��^�ɴΣ���ݔ����Ч��B����ݔ���oЧ��B
��8��Cycledis�����ھ��x��ÿ���@�����xݔ��opstate,ondis��߀ԭ��oЧ��B
��9��Ondis��ݔ����Ч��B�ľ��x��Cycledis-Ondis��oЧ��B���x
��10��ModePara1��ʸ�����x���^�c���ˣ���ǰ�\�Ӿ��x��
��11��ModePara2���؏����ڣ�����Ч��B����
��12��ModePara3�����ھ��x��ÿ��һ����Ч��B���x
��13��ModePara4����Ч��B���x�����ܴ������ھ��x��
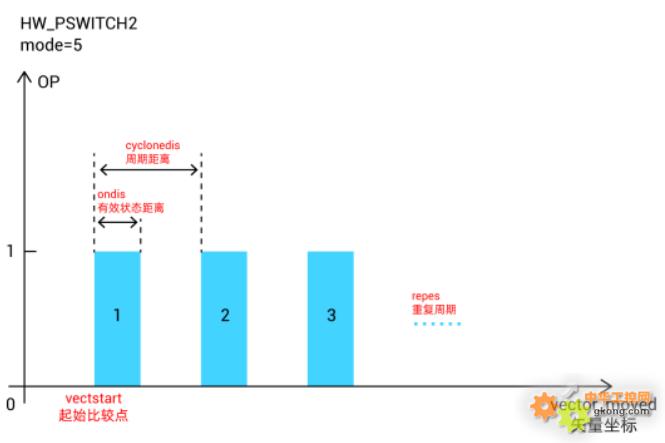
ԓģʽ��Ҫ���ܞ飺ModePara1���������^�c�O�ú�֮�������O�Æ��Sʸ�����x���^�c���tݔ��һ���O�úõ����ھ��x�}�_��
ԓģʽʹ�Õr��Ҫָ������ݔ���ڣ����ׂ����^�c��ݔ����B�ͱ��^�S�O�ú�֮�����O�ñ��^�c��ʸ�����x���^�c���ˣ���ǰ�\�Ӿ��x�����O�ú����ھ��x���؏����ڣ���Ч��B���x�ȡ���ӱ��^���o�������S�\�Ӽ��ɡ�
���D��ʾ���O�ø��ٱ��^ݔ���ڞ�0���ׂ����^�c��ݔ����B��1���O�ñ��^�S��0�����^�c��80���؏����ڞ�5�����ھ��x��100����Ч���x��20�������Sʸ�����x�\�ӵ�80֮��ÿ�\��100�ľ��x���͕�ݔ���O�úõ�����λ���}�_��
ʾ����������D��ʾ���ɈD�ɵî��S0�c�S1���M��300��400�IJ��a�\�ӕr����ʸ��λ��80��180��280��380��480�r��ݔ���O�úõ�����λ���}�_��

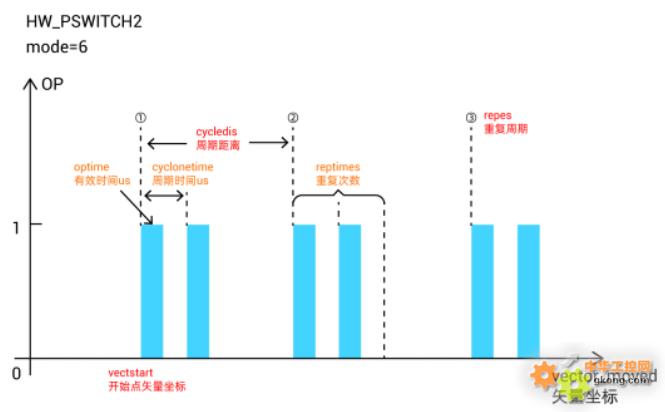
2.ʸ�����^�����ڕr�g�}�_��ģʽ6��
ZAux_Direct_HwPswitch2��ZMC_HANDLE handle��int Axisnum��int Mode��int Opnum��int Opstate��float ModePara1��float ModePara2��float ModePara3��float ModePara4��
��1��handle���������B�Ӿ��
��2��Axisnum�����^�S̖
��3��Mode��6-���ӱ��^��
��4��Opnum��������ݔ����
��5��Opstate����һ�����^�c��ݔ����B���J������Ч��B����֮�J��oЧ��B
��6��Vectstart:���^�cVECTOR_MOVED��ǰ�\�Ӿ��x
��7��Repes���؏����ڣ�һ�����ڃȱ��^�ɴΣ���ݔ����Ч��B����ݔ���oЧ��B
��8��Cycledis�����ھ��x��ÿ���@�����xݔ��opstate,ondis��߀ԭ��oЧ��B
��9��Ondis��ݔ����Ч��B�ľ��x��Cycledis-Ondis��oЧ��B���x
��10��ModePara1��ʸ�����x���^�c���ˣ���ǰ�\�Ӿ��x��
��11��ModePara2���؏����ڣ�����Ч��B����
��12��ModePara3�����ھ��x��ÿ��һ���@�����xݔ��һ�ζ��r��
��13��ModePara4��ģʽ6���棬ԓ�����o���x����0����������ֵ
ԓģʽ��Ҫ���ܞ飺ModePara1�����O�úñ��^�c֮�������O�Æ��Sʸ�����x���^�c֮�tݔ��һ���O�úõĶ��r�}�_��
ԓģʽʹ�Õr��Ҫָ������ݔ���ڣ��O�ú��ׂ����^�c��ݔ����B�ͱ��^�S�����O�ñ��^�c��ʸ�����x���^�c���ˣ���ǰ�\�Ӿ��x�����O�ú����ھ��x���؏����ڣ��O�ú�Ӳ�����r��������ӱ��^���o�������S�\�Ӽ��ɡ�
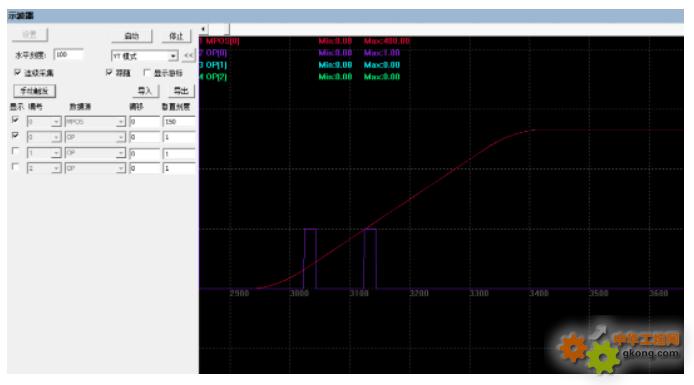
���D��ʾ���O�ø��ٱ��^ݔ���ڞ�0���ׂ����^�c��ݔ����B��1���O�ñ��^�S��0�����^�c��50���؏����ڞ�2�����ھ��x��100�����ڕr�g��40����Ч�r�g��20�������Sʸ�����x�\�ӵ�50֮��ÿ�\��100�ľ��x���͕�ݔ��һ���O�úõĶ��r�}�_��

ʾ����������D��ʾ���ɈD�ɵ�ݔ����OP(0)��ʸ�����x50��150�r��ݔ��һ���O�úõĶ��r�}�_��
���Σ����\�Ӽ��g�\�ӿ�����PSOҕ�X�w���c����ݔ����C++�_�l�����������SPSO�Ⱦ�/����ݔ�����ͷ������@�
���ྫ�ʃ���Ո�Pע“���\��С����”����̖����Ҫ���P�_�l�h���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
|

