|
���죬���\(y��n)��С���ֽo��ҷ���һ���\(y��n)�ӿ��ƿ�֮ECI3808��Ӳ���Ӿ�������M(j��n)��MFC����λ�C(j��)�_�l(f��)��
����һ��ECI3808Ӳ����B
����1.���ܽ�B
����ECI3808ϵ�п��ƿ�֧������_(d��) 12 �Sֱ�����a(b��)������A�����a(b��)�����g�A�����������a(b��)�����݆������X݆��ͬ�����S��̓�M�S���C(j��)е��ָ���;���Ã�(y��u)���ľW(w��ng)�j(lu��)ͨӍ�f(xi��)�h���Ԍ�(sh��)�F(xi��n)��(sh��)�r���\(y��n)�ӿ��ơ�
����ECI3808ϵ���\(y��n)�ӿ��ƿ�֧����̫�W(w��ng)��RS232 ͨӍ�ӿں���X���B��������X��ָ���\(y��n)�У�����ͨ�^CAN����ȥ�B�Ӹ����U(ku��)չģ�K���Ķ��U(ku��)չݔ��ݔ���c(di��n)��(sh��)���\(y��n)���S��
����ECI3808ϵ���\(y��n)�ӿ��ƿ��đ�(y��ng)�ó������ʹ�� VC,VB��VS��C++��C#��ܛ�����_�l(f��)�������\(y��n)�Еr��Ҫ�ӑB(t��i)�� zmotion.dll���{(di��o)ԇ�r����ZDevelopܛ��ͬ�r�B�ӵ����������Ķ������{(di��o)ԇ�������^�졣
����
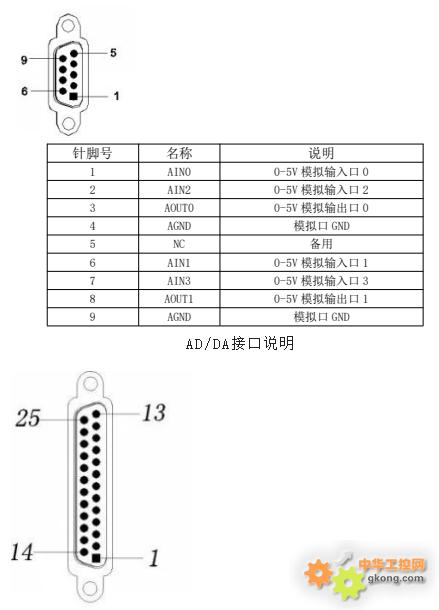
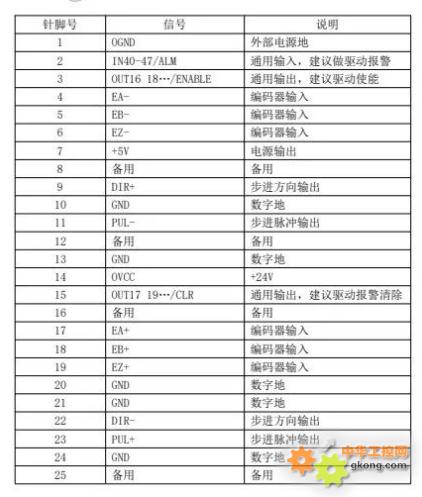
����2.Ӳ���ӿ�
����
����
����3.������������Ϣ
����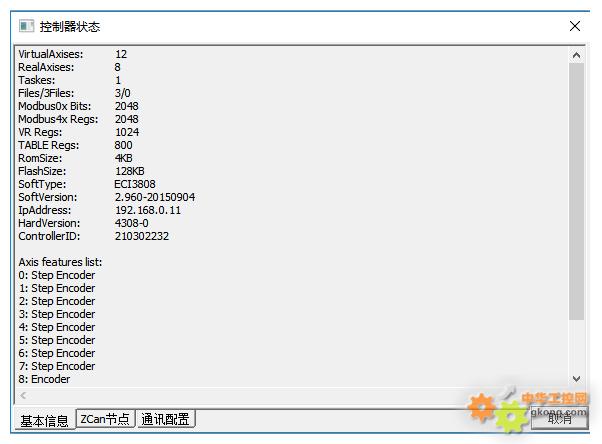
����
��������C++�M(j��n)���\(y��n)�ӿ����_�l(f��)
����1.�½�MFC�(xi��ng)Ŀ�����Ӻ���(sh��)��
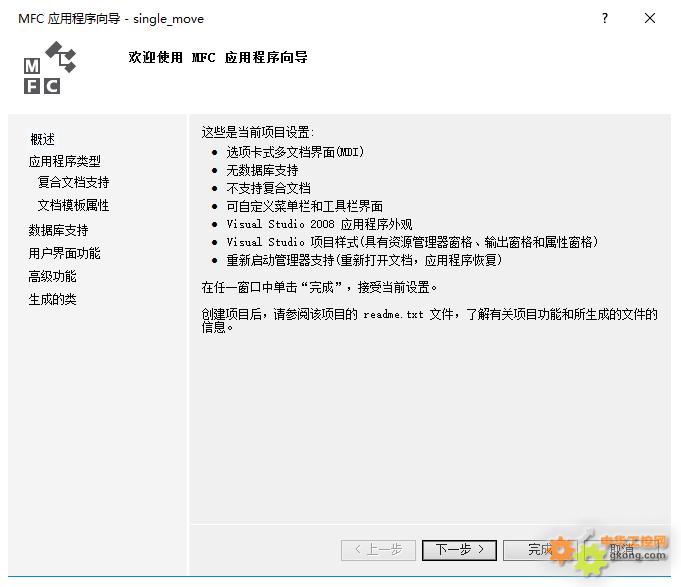
����(1)��VS2015�ˆ�“�ļ�”→“�½�”→ “�(xi��ng)Ŀ”�����ӄ�(chu��ng)���(xi��ng)Ŀ��?q��)��?/p>
����
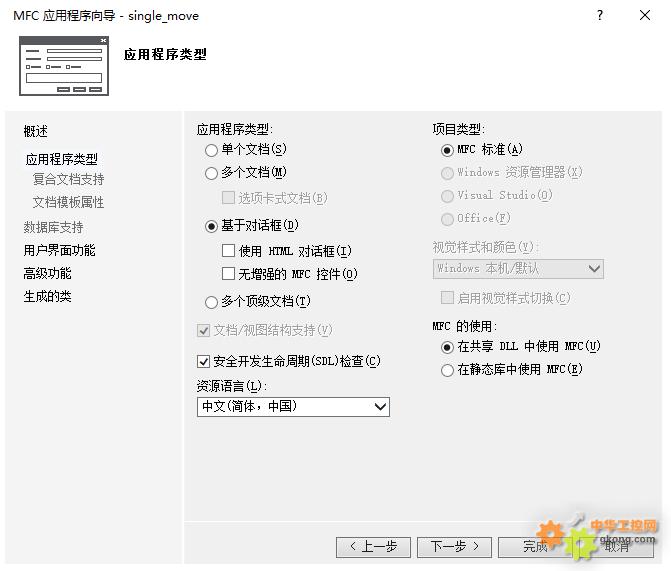
����(2)�x���_�l(f��)�Z�Ԟ�“Visual C++”�ͳ������“MFC��(y��ng)�ó���”��
����
����(3)�c(di��n)����һ�����ɡ�
����
����(4)�x����͞�“���ڌ�Ԓ��”����һ��������ɡ�
����
����(5)�ҵ��S���ṩ�Ĺ�P�Y�ϣ�·������(64λ�����)��
����A.�M(j��n)��S���ṩ�Ĺ�P�Y���ҵ�“8.PC����(sh��)”�ļ��A�����c(di��n)���M(j��n)�롣
����
����B.�x��“����(sh��)��2.1”�ļ��A��
����
����C.�x��“Windowsƽ�_”�ļ��A��
����
����D.����(j��)��Ҫ�x��(y��ng)�ĺ���(sh��)���@���x��64λ�졣
����
����E.�≺C++�ĉ��s��,������C++����(y��ng)�ĺ���(sh��)�졣
����
����F.����(sh��)����w·�����¡�
����
����(6)���S���ṩ��C++�Ď��ļ������P(gu��n)�^�ļ���(f��)�Ƶ��½����(xi��ng)Ŀ���档
����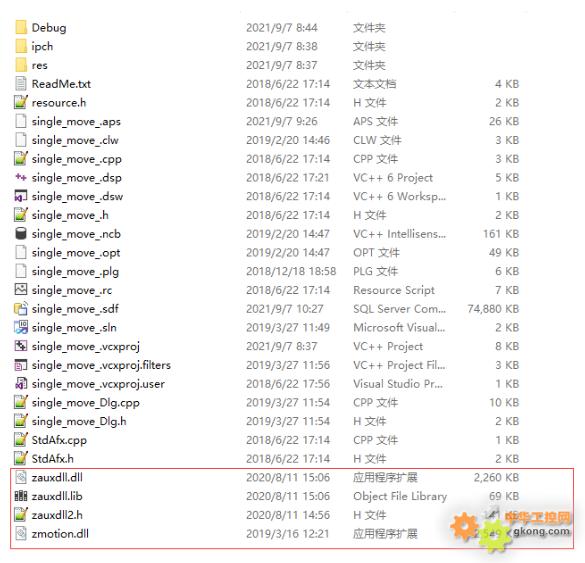
����(7)���(xi��ng)Ŀ�������o�B(t��i)������P(gu��n)�^�ļ���
����A.���ғ��(xi��ng)Ŀ�ļ������������x��:“����”→“�F(xi��n)���(xi��ng)”��
����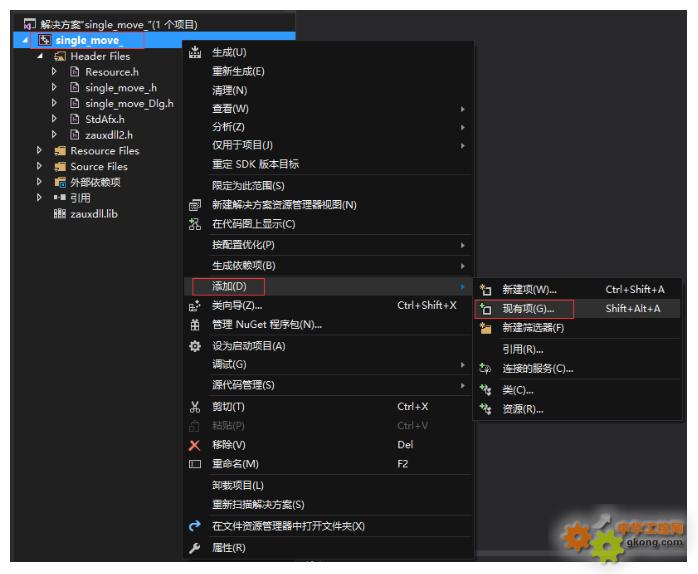
����B.�ڏ����Ĵ��������������o�B(t��i)������P(gu��n)�^�ļ���
����(8)���õ����^�ļ��Ͷ��x�������B�Ӿ����
����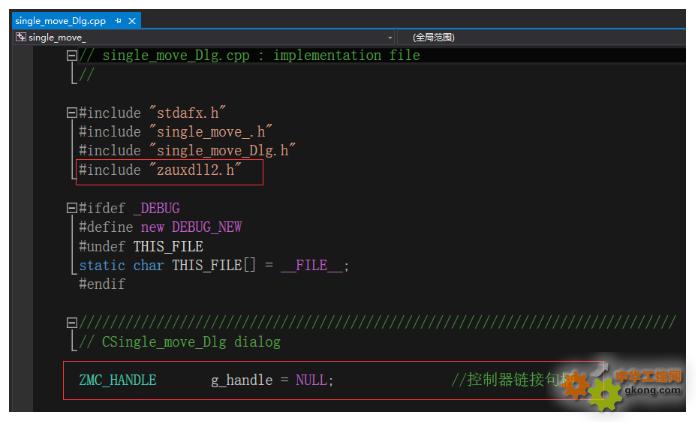
�������ˣ��(xi��ng)Ŀ�½���ɣ����M(j��n)��MFC�(xi��ng)Ŀ�_�l(f��)��
�� ��2.�鿴PC����(sh��)�փԣ���Ϥ���P(gu��n)����(sh��)�ӿڡ�
����(1)PC����(sh��)�փ�Ҳ�ڹ�P�Y�����棬���w·�����£�“��P�Y��\8.PC����(sh��)\����(sh��)��2.1\ZMotion����(sh��)�쾎���փ� V2.1.pdf”
����
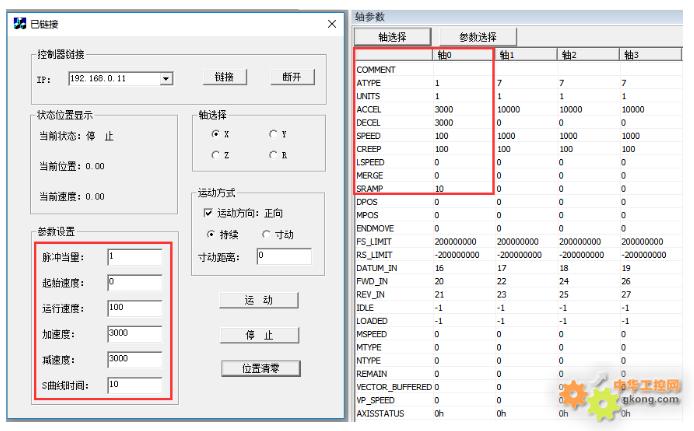
����(2)朽ӿ��������@ȡ朽Ӿ����
����
����(3)ʹ���S����(sh��)�O(sh��)�����P(gu��n)��ָ�����朽Ӿ��“g_handle”�����������M(j��n)���S����(sh��)���O(sh��)�ã��S����(sh��)�O(sh��)�����P(gu��n)��ָ�����¡�
����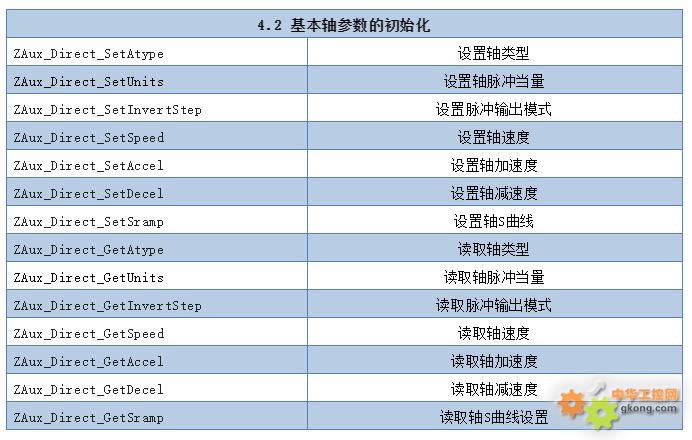
����(4)���S�\(y��n)�ӽӿڡ�
�� ��3.MFC�_�l(f��)���S�\(y��n)�����̡�
����(1)���̽������¡�
����
����(2)朽Ӱ��o���¼�̎������(sh��)���{(di��o)��朽ӿ������Ľӿں���(sh��)ZAux_OpenEth()���c�������M(j��n)��朽�,朽ӳɹ��Ӷ��r��1�O(ji��n)�ؿ�������B(t��i)��
//�W(w��ng)��朽ӿ�����
void CSingle_move_Dlg::OnOpen()
{
char buffer[256];
int32 iresult;
//����ѽ�(j��ng)朽ӣ��t�Ȕ��_朽�
if(NULL != g_handle)
{
ZAux_Close(g_handle);
g_handle = NULL;
}
//��IP���������x��@ȡIP��ַ
GetDlgItemText(IDC_IPLIST,buffer,255);
buffer[255] = '\0';
//�_ʼ朽ӿ�����
iresult = ZAux_OpenEth(buffer, &g_handle);
if(ERR_SUCCESS != iresult)
{
g_handle = NULL;
MessageBox(_T("朽�ʧ��"));
SetWindowText("δ朽�");
return;
}
//朽ӳɹ��_�����r��1
SetWindowText("��朽�");
SetTimer( 1, 100, NULL );
}
����(3)ͨ�^���r��1�O(ji��n)�ؿ�������B(t��i)��
void CSingle_move_Dlg::OnTimer(UINT_PTR nIDEvent)
{
//����]��朽ӿ�����
if(NULL == g_handle)
{
MessageBox(_T("朽Ӕ��_"));
return ;
}
//���r��1
if(1 == nIDEvent)
{
CString string;
float position = 0;
//�@ȡ��(d��ng)ǰ�Sλ��
ZAux_Direct_GetDpos( g_handle,m_nAxis,&position);
string.Format("��(d��ng)ǰλ�ã�%.2f", position );
GetDlgItem( IDC_CURPOS )->SetWindowText( string );
//�@ȡ��(d��ng)ǰ�S�ٶ�
float NowSp = 0;
ZAux_Direct_GetVpSpeed( g_handle,m_nAxis,&NowSp);
string.Format("��(d��ng)ǰ�ٶȣ�%.2f", NowSp );
GetDlgItem( IDC_CURSPEED)->SetWindowText( string );
//�Дஔ(d��ng)ǰ�S��B(t��i)
int status = 0;
ZAux_Direct_GetIfIdle(g_handle, m_nAxis,&status);
if (status == -1)
{
GetDlgItem( IDC_CURSTATE )->SetWindowText( "��(d��ng)ǰ��B(t��i)��ͣ ֹ" );
}
else
{
GetDlgItem( IDC_CURSTATE )->SetWindowText( "��(d��ng)ǰ��B(t��i)���\(y��n)����" );
}
}
CDialog::OnTimer(nIDEvent);
}
����(4)ͨ�^���Ӱ��o���¼�̎������(sh��)ȥ�O(sh��)���S����(sh��)���_ʼ�S�\(y��n)�ӡ� ����
//���Ӱ��o�¼�̎������(sh��)
void CSingle_move_Dlg::OnStart()
{
//����]��朽ӿ�����
if(NULL == g_handle)
{
MessageBox(_T("朽Ӕ��_��B(t��i)"));
return ;
}
UpdateData(true);
//�Дஔ(d��ng)ǰ�S��B(t��i)
int status = 0;
ZAux_Direct_GetIfIdle(g_handle, m_nAxis,&status);
if(status == 0)
{
return; //����ѽ�(j��ng)���\(y��n)��
}
//�O(sh��)���S��� 1-�}�_�S���
ZAux_Direct_SetAtype(g_handle, m_nAxis, 1);
//�O(sh��)���}�_ģʽ��߉�����}�_+����
ZAux_Direct_SetInvertStep(g_handle, m_nAxis, 0);
//�O(sh��)���}�_��(d��ng)�� 1��ʾ��һ���}�_���λ ���O(sh��)�Þ�1MM���}�_����(sh��)
ZAux_Direct_SetUnits(g_handle, m_nAxis, m_units);
//�O(sh��)���ٶȣ��Ӝp��
ZAux_Direct_SetLspeed(g_handle, m_nAxis, m_lspeed);
ZAux_Direct_SetSpeed(g_handle, m_nAxis, m_speed);
ZAux_Direct_SetAccel(g_handle, m_nAxis, m_acc);
ZAux_Direct_SetDecel(g_handle, m_nAxis, m_dec);
//�O(sh��)��S�����r�g �O(sh��)�Þ�0��ʾ���μӜp��
ZAux_Direct_SetSramp(g_handle, m_nAxis, m_sramp);
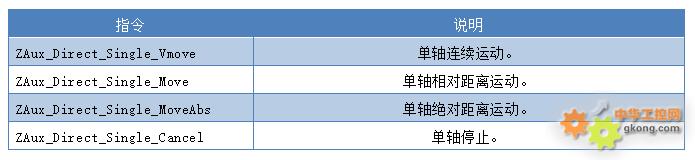
//�Д��\(y��n)��ģʽ
if(m_mode == 0 )
{
//���(λ��ģʽ)
ZAux_Direct_Single_Vmove(g_handle, m_nAxis, m_bLogic?1:0);
}
else
{
//���m(x��)�(q��)��(�ٶ�ģʽ)
ZAux_Direct_Single_Move(g_handle, m_nAxis, m_step*(m_bLogic?1:-1));
}
UpdateData(false);
}
������ �{(di��o)ԇ�c�O(ji��n)��
�������g�\(y��n)�����̣�ͬ�rͨ�^ZDevelopܛ���B�ӿ���������������B(t��i)�M(j��n)�бO(ji��n)�ء�
�� ��1.ZDevelopܛ���B�ӿ������O(ji��n)�ؿ������Ļ�������(sh��)��
����
���� 2.ͨ�^ZDevelopܛ����ʾ�������܌��S�\(y��n)�ӵIJ����M(j��n)��ץȡ��
����A.����\(y��n)�ӛ]�O(sh��)��S�����r�g�������D��ʾ��
����
����B.����\(y��n)���O(sh��)��S�����r�g�������D��ʾ��
����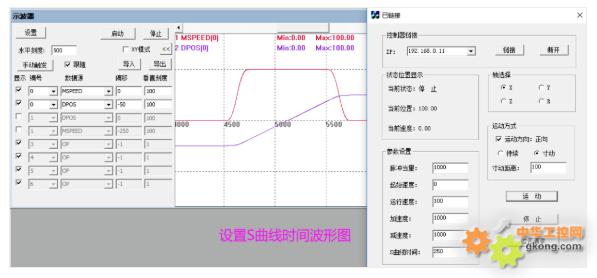
���� 3.ZDevelopܛ���{(di��o)ԇҕ�l��
�������Σ����\(y��n)�Ӽ��g(sh��)�������õ��\(y��n)�ӿ��ƿ�(һ)��Ӳ���Ӿ�����λ�C(j��)�_�l(f��)���ͷ������@�
�������ྫ�ʃ�(n��i)��Ո�P(gu��n)ע“���\(y��n)��С����”����̖����Ҫ���P(gu��n)�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\(y��n)�Ӽ��g(sh��)�N�۹��̎���400-089-8936��
�������������\(y��n)�Ӽ��g(sh��)ԭ��(chu��ng)���gӭ����D(zhu��n)�d����ͬ�W(xu��)��(x��)��һ������Ї���������ˮƽ�����°��(qu��n)�w���\(y��n)�Ӽ��g(sh��)���У������D(zhu��n)�dՈע������Դ��
|

