|
����(ji��)�҂���Ҫȥ�v��һ����NPSOģʽԭ����ʹ�õ��v�⣬�Ñ��ɸ���(j��)���H�����`���x���|�l(f��)ģʽ��
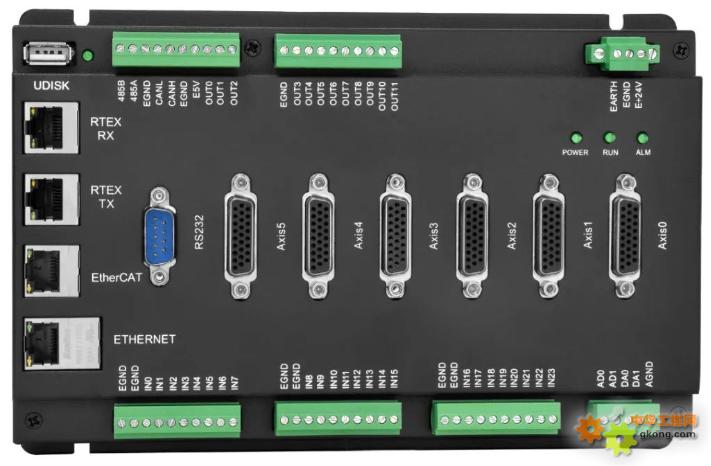
ZMC460N�p����������
һ��Ӳ���f��
Ӳ���x�͵���ҪҪ����֧��PSO���ܣ��ٷ���PSO�đ�(y��ng)�È��Ϻ��S��(sh��)���x����w����̖��������ZMC460N�p�����\�ӿ���������չ�_��B��
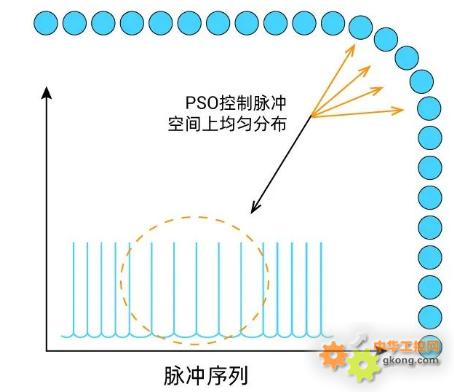
PSO�������ڿ��Ƽ�����c�z�y�ĸ����_/�P(gu��n)��ֱ�����a��ƽ��A�����a����������ɼӹ�܉�E���B�m(x��)���a����������β��a���ٶ��B�m(x��)���ṩ�ӹ���Ч�ʡ�
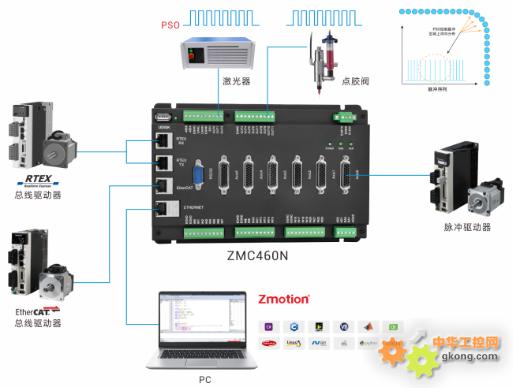
ZMC460N�p����������
ZMC460N�p���������������\�Ӽ��g(sh��)�Ƴ�����һ���W(w��ng)�j(lu��)60�S�\�ӿ�������֧��EtherCAT�����S+RTEX�����S+�}�_�S���ʹ�ã����Ԏ������}�_�S�ӿڣ���������}�_ݔ���Ͳ�־��a��ݔ�룩��ͨ��ݔ����֧�����Þ�ζ��}�_ݔ����ͨ��ݔ���֧�����óɆζ˾��a��ݔ�롣�}�_ݔ���l�������_10MHZ��EtherCAT������ͨӍ���������_250�롣
֧��12·PSOݔ����ݔ���ڪ�����֧��12·ͬ�rݔ����ÿ��ϵ�y(t��ng)���ڿɱ��^ݔ����Σ���(y��ng)�È��������S����
ZMC460N�p�����������ܘ�(g��u)�D
PSO������Ҫͨ�^“HW_PSWITCH2”Ӳ��λ�ñ��^ݔ��ָ���“HW_TIMER”Ӳ�����rָ��F(xi��n)��������v��һ���@�ɂ�ָ���Ԕ���÷���
����ָ���f��
1.HW_PSWITCH2 --Ӳ��λ�ñ��^ݔ��
��1��ָ���f��
Ӳ��λ�ñ��^ݔ�����ܱ��ʹ��֧��Ӳ�����^ݔ����ݔ���ڣ�����ZMC460N����ʹ��OUT0-11�ڡ�
֧�ֱ��^�}�_�S��λ�á����a���ķ���λ�úͿ����S��λ�á����^���S�����a��ݔ��r���Ԅ�ʹ�þ��a��λ�Á��|�l(f��)���������a���Ĉ��ϱ���^�}�_ݔ��������ʹ��MOVEOP_DELAY����(sh��)���{(di��o)��ݔ���ʴ_�r�̡�
��2��ע�����
ZMC460Nÿ��ϵ�y(t��ng)���ڃ�(n��i)���Ա��^һ�Σ���ÿ�����ڃ�(n��i)��ݔ����ֻ�ܱ��^һ�Σ�ϵ�y(t��ng)����ͨ�^“SERVO_PERIOD”��ԃ����ϵ�y(t��ng)�����^��r�������^ݔ���}�_����С��ϵ�y(t��ng)���ڕr������(d��o)��ݔ��������
“HW_PSWITCH2”�c“MOVE_OP”����ʹ��ͬ�ӵ�Ӳ���YԴ�������h��ͬһ��ͨ��ͬ�rʹ�ã������ڲ�ͬ��ͨ��ͬ�rʹ�á�
�{(di��o)��TABLEλ�Ô�(sh��)��(j��)�r�������б��^�c���ǰ��Ҫ�ġ�
ʹ���}�_��늙C�rֻ��ATYPE��4�r���DZ��^����λ��(MPOS)��Ĭ�J���S��ATYPE��1��7���^��������λ��(DPOS)��
HW_PSWITCH2�]�б��^�������c��Ԓ��һ��Ҫ�O(sh��)��modeֵ��2��ͨ�^HW_PSWITCH2(2)ָ��ֹͣ���h���]����ɵı��^�c����t�����ݔ��ͨ����������������ʹ��ǰ��Ҫ�{(di��o)�ô�ģʽ��������ܛ]�б��^��ɵĔ�(sh��)��(j��)��
��3��ָ���Z��
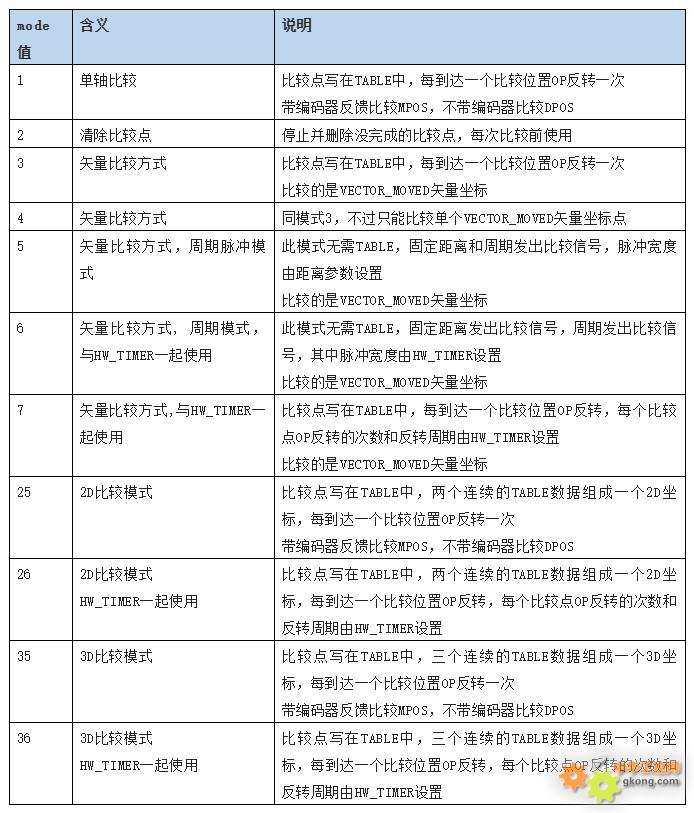
HW_PSWITCH2(mode, [...])
A.Modeģʽһ�[����
B.HW_PSWITCH2��ģʽ���Կ��Y(ji��)��ɴ��
a.����TABLE���惦�Ĕ�(sh��)��(j��)�c���M�б��^���}�_�����ɔ�(sh��)��(j��)���g�����\���ٶȹ�ͬ�Q�������Ա��^ǰ��Ҫ����(sh��)��(j��)����“TABLE”�У�Ȼ�����{(di��o)�á�
���P(gu��n)ģʽ��1��3��7��25��26��35��36��
b.�Ⱦ����ڱ��^���o�����“TABLE”��“HW_PSWITCH2”�O(sh��)�ú��|�l(f��)�ı��^��λ�á����^���ڔ�(sh��)��“HW_TIMER'�O(sh��)��ÿ���|�l(f��)���^ݔ���}�_�Č��ȣ��@�ģʽ����(sh��)�O(sh��)��������һЩ������ָ��ĽM��Ҳ�Ɍ��F(xi��n)׃�����x��ݔ����
���P(gu��n)ģʽ��6��ģʽ5�Ȳ���ҪTABLEҲ����Ҫ“HW_TIMER”��Ɍ��F(xi��n)�Ⱦ����ڱ��^��
ModeģʽԔ�Ⅲ�����ģ�modeģʽ��ͬ��������Ҫ��ą���(sh��)Ҳ��ͬ��
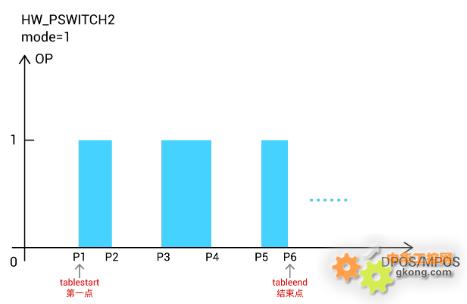
��4�� Mode=1�����S���^
HW_PSWITCH2(1,opnum,opstate,tablestart,tableend[,direction])
mode��1-���ӱ��^��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
tablestart����һ�����^�c�^����������TABLE��̖
tableend�����һ�����^�c�^����������TABLE��̖
direction����һ���c�Д��0����ؓ��1��������-1��ʹ�÷���
���f���� ���^�c����TABLE�У�ÿ���_һ�����^λ��OP���D(zhu��n)һ�Ρ�
��5�� Mode=2��������^�c
HW_PSWITCH2(2)
mode��2-ֹͣ���h���]��ɵı��^�c
���f���� ʹ��ǰ��Ҫ�{(di��o)�ô�ģʽ��������ܛ]�б��^��ɵĔ�(sh��)��(j��)��ʹ���^����Ҳ���l(f��)�ʹ����ֹͣ���^��
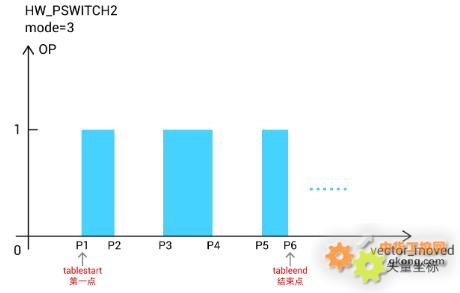
��6�� Mode=3�� ʸ�����^��ʽ
HW_PSWITCH2(3, opnum, opstate, tablestart, tableend)
mode��3-���ӱ��^��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
tablestart����һ�����^�cVECTOR_MOVED��������TABLE��̖
tableend�����һ�����^�cVECTOR_MOVED��������TABLE��̖
�� �f�������^�c����TABLE�У�ÿ���_һ�����^ʸ��λ��OP���D(zhu��n)һ�Ρ�
ʹ��ʸ�����x���^�r���c“VECTOR_MOVED”�M�б��^�����h�B�m(x��)�\��ǰ�O(sh��)��“VECTOR_MOVED”��ʼֵ��
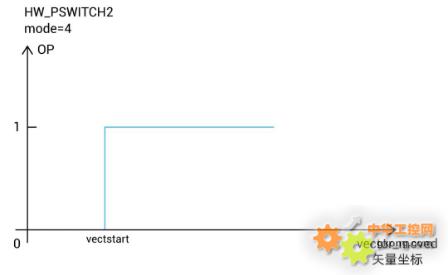
��7�� Mode=4�� ʸ�����^��ʽ,�����^�c
HW_PSWITCH2(4, opnum, opstate, vectstart)
mode��4-���ӱ��^��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
vectstart�����^�cVECTOR_MOVED��ǰ�\�Ӿ��x
�� �f���� ���_ָ���O(sh��)�õ�һ�����^ʸ��λ��OP���D(zhu��n)�����^�Y(ji��)����
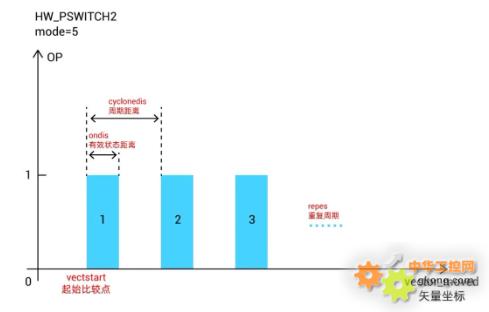
��8�� Mode=5�� ʸ�����^��ʽ, �����}�_ģʽ
HW_PSWITCH2(5,opnum, opstate, vectstart, repes, cycledis, ondis)
mode��5-���ӱ��^��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)���J������Ч��B(t��i)����֮�J��oЧ��B(t��i)
vectstart�����^�cVECTOR_MOVED��ǰ�\�Ӿ��x
repes���؏�(f��)���ڣ������ڃ�(n��i)���^�ɴΣ���ݔ����Ч��B(t��i)����ݔ���oЧ��B(t��i)
cycledis�����ھ��x��ÿ���@�����xݔ��opstate, ondis��߀ԭ��oЧ��B(t��i)
ondis��ݔ����Ч��B(t��i)�ľ��x��(cycledis- ondis)��oЧ��B(t��i)���x
���f������ģʽ�o��TABLE�����˾�����ʸ�����ˣ���vectstart��λ���_ʼ���^��ÿ��cycledis���x�|�l(f��)һ�α��^���؏�(f��)���^�����ڞ�repes��ÿ���|�l(f��)���^��̖����ondis���x���P(gu��n)�]��̖���ȴ���һ���ڵ��|�l(f��)��
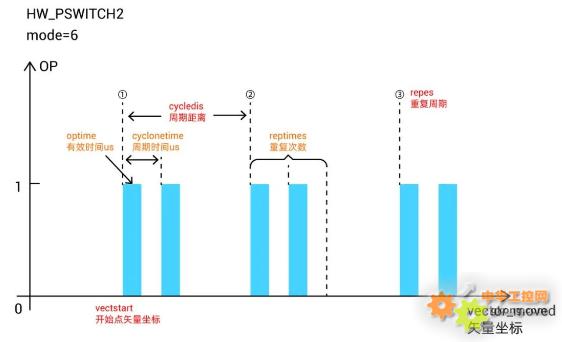
��9�� Mode=6�� ʸ�����^��ʽ, �����}�_ģʽ
���cHW_TIMERһ��ʹ��
HW_PSWITCH2(6, opnum, opstate, vectstart, repes, cycledis)
mode��6-���ӱ��^��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
vectstart�����^�cVECTOR_MOVED��ǰ�\�Ӿ��x
repes���؏�(f��)���ڣ�һ������ֻ���^һ��
cycledis�����ھ��x��ÿ���@�����xݔ��һ��
�� �f���� ��ģʽ�o��TABLE�����˾�����ʸ�����ˣ���vectstart��λ���_ʼ���^��ÿ��cycledis���x�|�l(f��)һ�α��^���؏�(f��)���^�����ڞ�repes��ÿ���|�l(f��)���^��̖������̖���}�_������“HW_TIMER”ָ���O(sh��)�á�
“HW_TIMER”���Կ��Ƶ��_һ���|�l(f��)�c����OP���D(zhu��n)��Σ�“HW_TIMER”������ɵȴ���һ���ڵ��|�l(f��)��
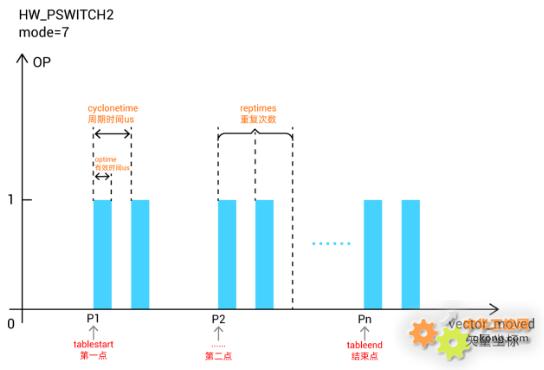
��10�� Mode=7�� ʸ�����^��ʽ
�� �cHW_TIMERһ��ʹ��
HW_PSWITCH2(7��opnum��opstate, tablestart, tableend [, optimeus, optimes, cyctimeus])
mode��7-���ӱ��^����opstate�����D(zhu��n)�������cHW_TIMER���ʹ��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
tablestart����һ�����^�cVECTOR_MOVED��������TABLE��̖
tableend�����һ�����^�cVECTOR_MOVED��������TABLE��̖
[���
���(sh��)��HW_TIMER���xһ��HW_TIMER�Ϊ������ԄӑB(t��i)�{(di��o)������(sh��)]
optimeus���ӑB(t��i)�{(di��o)��HW_TIMER����Ч�r�g
optimes���ӑB(t��i)�{(di��o)��HW_TIMER���|�l(f��)�}�_��(sh��)��0-��ݔ��
cyctimeus���ӑB(t��i)�{(di��o)��HW_TIMER���}�_���ڕr�g
�� �f���� ���^�c����TABLE�У����˾�����ʸ�����ˣ�ÿ���_һ��TABLE���^ʸ��λ���|�l(f��)OP���˕rOP���}�_���Ⱥ�ÿ���|�l(f��)�ı��^�Δ�(sh��)��HW_TIMER���ƣ����_��һ��TABLEλ�ã�OP�ٴ��|�l(f��)��
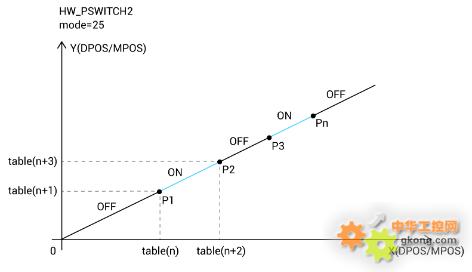
��11�� Mode= 25��26��2D���^
2D���^�� ÿ2���B�m(x��)table�惦һ��XY�����c�����F(xi��n)���c���^��ÿ�����^�cݔ����B(t��i)���D(zhu��n)��
25��35ģʽ��ƣ�26��36ģʽ��ƣ����cHW_TIMER���ʹ�á�
A.HW_PSWITCH2(25, opnum, opstate, maxerr, num, tablepos)
mode��25�����S�ı��^ģʽ
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
maxerr�����^λ��ÿ���S���ҵ��}�_ƫ��M��ƫ������_ʼ���^���˅���(sh��)���܌�0
num��table����惦�ı��^�c���˂���(sh��)
tablepos����һ�����^�c��������table��̖
�� �f�������^�c����TABLE�У��ɂ��B�m(x��)��TABLE��(sh��)��(j��)�M��һ��2D���ˣ�ÿ���_һ�����^λ��OP���D(zhu��n)һ�Ρ�
ʾ�����{ɫ�α�ʾOP�_��������ò��a�\�Ӿ�֧�ֱ��^�����^�c����һ����Ҫ�ʴ_����t��Ӱ푺����c�ı��^��
B.HW_PSWITCH2(26, opnum, opstate, maxerr, num, tablepos, [ophwtimeus, ophwtimes, hwcyctimeus])
mode��26�����S�ı��^ģʽ
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
maxerr�����^λ��ÿ���S���ҵ��}�_ƫ��M��ƫ������_ʼ���^���˅���(sh��)���܌�0
num��table����惦�ı��^�c���˂���(sh��)
tablepos����һ�����^�c��������table��̖
[���
���(sh��)��HW_TIMER���xһ��HW_TIMER�Ϊ������ԄӑB(t��i)�{(di��o)������(sh��)]
ophwtimeus���}�_�r�g
ophwtimes���}�_����(sh��)
hwcyctimeus���}�_����
�� �f�������^�c����TABLE�У��ɂ��B�m(x��)��TABLE��(sh��)��(j��)�M��һ��2D���ˣ�ÿ���_һ�����^λ���|�l(f��)OP��ÿ�����^�cOP���D(zhu��n)�ĴΔ�(sh��)�ͷ��D(zhu��n)������HW_TIMER�O(sh��)�ã����_��һ��TABLEλ�ã�OP�ٴ��|�l(f��)�����ģʽ7��ģʽ36��

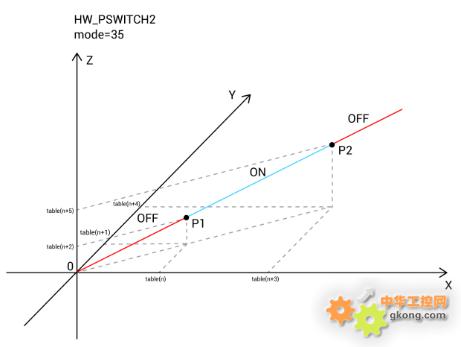
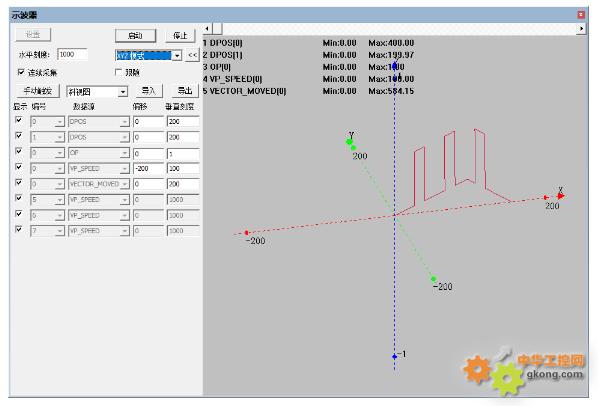
��12�� Mode= 35��36��3D���^
3D���^�� ÿ3���B�m(x��)TABLE�惦һ��XYZ�����c�����F(xi��n)���c���^��ÿ�����^�cݔ����B(t��i)���D(zhu��n)��
25��35ģʽ��ƣ�26��36ģʽ��ƣ����cHW_TIMER��(f��)�á�
A.HW_PSWITCH2(35, opnum, opstate, maxerr, num, tablepos)
mode��35�����S�ı��^ģʽ
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
maxerr�����^λ��ÿ���S���ҵ��}�_ƫ��M��ƫ������_ʼ���^���˅���(sh��)���܌�0
num��table����惦�ı��^�c���˂���(sh��)
tablepos����һ�����^�c��������table��̖
�� �f�������^�c����TABLE�У������B�m(x��)��TABLE��(sh��)��(j��)�M��һ��3D���ˣ�ÿ���_һ�����^λ��OP���D(zhu��n)һ�Ρ� ���ģʽ25��
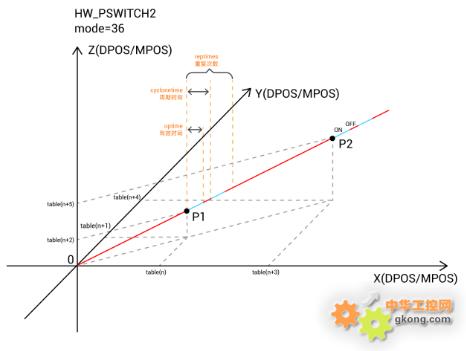
B.HW_PSWITCH2(36, opnum, opstate, maxerr, num, tablepos, [ophwtimeus, ophwtimes, hwcyctimeus])
mode��35��36�����S�ı��^ģʽ
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
maxerr�����^λ��ÿ���S���ҵ��}�_ƫ��M��ƫ������_ʼ���^���˅���(sh��)���܌�0
num��table����惦�ı��^�c���˂���(sh��)
tablepos����һ�����^�c��������table��̖
[���
���(sh��)��HW_TIMER���xһ��HW_TIMER�Ϊ������ԄӑB(t��i)�{(di��o)������(sh��)]
ophwtimeus���}�_�r�g
ophwtimes���}�_����(sh��)
hwcyctimeus���}�_����
�� �f�������^�c����TABLE�У������B�m(x��)��TABLE��(sh��)��(j��)�M��һ��3D���ˣ�ÿ���_һ�����^λ���|�l(f��)OP��ÿ�����^�cOP���D(zhu��n)�ĴΔ�(sh��)�ͷ��D(zhu��n)������HW_TIMER�O(sh��)�ã����_��һ��TABLEλ�ã�OP�ٴ��|�l(f��)�����ģʽ26��ģʽ7��
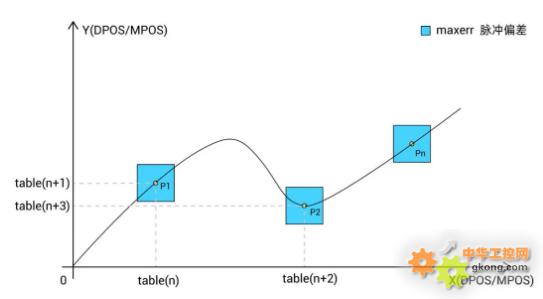
→maxerr�}�_ƫ�� �f��
2Dģʽ���O(sh��)��XY������Ҫ�ʴ_���S�\�Ӳ����ʴ_��TABLE���^�c�r���o���|�l(f��)��3Dģʽͬ�����ʶ�S���^ģʽ����һ�����Ⅲ��(sh��)maxerrλ�÷���ƫ����ҷ�������Ч��
�����Hλ�������c�cTABLE�ı��^�c�IJ�ֵ��maxerr������(n��i)����Ч���|�l(f��)�r�̞鮔ǰλ���M����^�c���|�l(f��)������(n��i)���|�l(f��)���^�����^����ʾ��D���£�ע�⣺maxerr�Ć�λ���}�_��(sh��)��ƫ����Ǿ��x��ƫ�
2. HW_TIMER -- Ӳ�����r
Ӳ�����r��������Ӳ�����^ݔ����һ�Εr�g��߀ԭ�ƽ��“HW_TIMER”ֻ��1����ÿ���{(di��o)�Õ�����ֹ֮ͣǰ���{(di��o)�á�
��ʹ�û���^��ɕrʹ��“HW_TIMER(0)”�P(gu��n)�]��
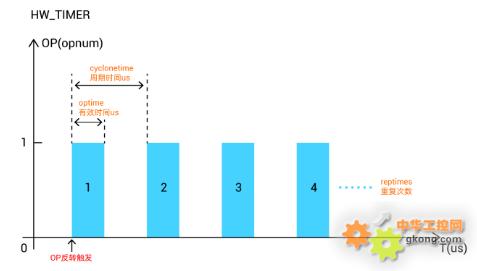
HW_TIMER(mode, cyclonetime, optime, reptimes, opstate, opnum )
mode��0ֹͣ��2-����
cyclonetime�����ڕr�g��us��λ
optime����Ч�r�g��us��λ
reptimes���؏�(f��)�Δ�(sh��)������ģʽ��reptimes =0�r��ܛ�P(gu��n)�]HW_TIMER��ԭ�����}�_�]����ɵģ����^�m(x��)ݔ�����
opstate��ݔ��ȱʡ��B(t��i)��ݔ����׃?y��u)�Ǵˠ�B(t��i)���_ʼӋ�r
opnum��ݔ���ھ�̖�������Ӳ�����^ݔ���Ŀ�
�� �f��������(sh��)�O(sh��)�ÿɅ����·�ʾ��D����ָ���Ч���ǹ̶��r�g����ݔ�����O(sh��)��ÿ�����ڵ���Чݔ���ĕr�g���؏�(f��)ݔ���ĴΔ�(sh��)��
→��ͬģʽ���c�ı��^��

���“HW_TIMER”ʹ�õ�ģʽ���}�_ݔ���Č�����“HW_TIMER”ָ��ָ����
�^��������ָ��ǰλ��������ԭ�c�����ˣ�ʸ��������ָ���S��ԭ�c֮���\�ӵ���ǰλ�õĿ����x��ʸ������ֻ��������Ӌ��ʹ��ǰ����ք����㡣
�����S0������������\��200���ڷ����\��100���˕r�Ľ^�����˞�100����ʸ�����˞�300�����(zh��)�Ѓ��S���a�\�ӣ��tʸ�����˞鮔ǰ���a�\�ӵĺϳ�܉�E��ʸ������ʸ�����^��ģʽ��֧�ֶ��S�Ĉ��ϡ�
�ю����a�������Ԅӱ��^MPOS���������a�����^DPOS��
�����{(di��o)ԇ����
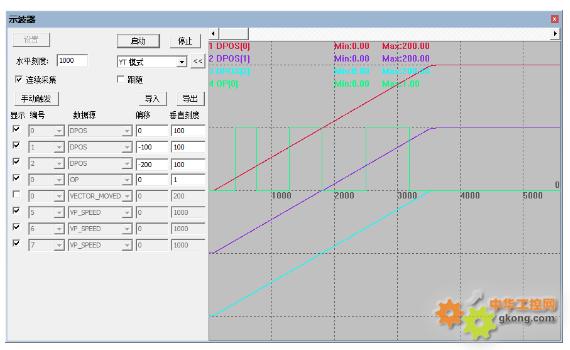
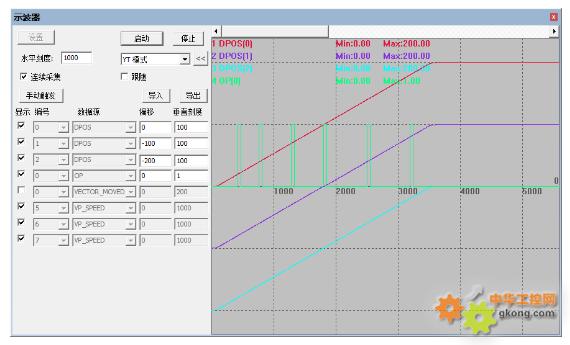
����ģʽ�Č��F(xi��n)�������£����������|�l(f��)��ͬ��ģʽ�������_ʾ������ֱ�^���^��PSO��ݔ���S�\�ӵ�׃����r��
��ע�⣺ �{(di��o)��“HW_PSWITCH2”�|�l(f��)���^ݔ��ǰ���Ȱl(f��)��“HW_PSWITCH2(2)”ֹͣ���h���]����ɵı��^�c����ֹ���ε�ݔ������������ʹ����Ӳ�����r��“HW_TIMER”֮���h�l(f��)��“HW_TIMER(0)”�P(gu��n)�]���r����
�������£�
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
WAIT IDLE(2)
'���A(ch��)�S����(sh��)�O(sh��)��
BASE(0,1,2) '�x��XY�S
ATYPE=1,1,1 '1-�}�_�S��ͣ����^DPOS��4-�����a�������S��ͣ����^���a���ķ���λ��MPOS
UNITS=100,100,100
SPEED=100,100,100
ACCEL=1000,1000,1000
DECEL=1000,1000,1000
MERGE=ON,ON,ON
SRAMP=50,50,50 's�����ٶ�ƽ��
OP(0,OFF) '��ʼ���P(gu��n)�]PSOʹ�õ�ݔ����
VECTOR_MOVED = 0 '���aʸ�����x��0
global g_cmd '���^ģʽ�x��
g_cmd = 0
while 1 '�yԇ���б��^ģʽ
if g_cmd = 1 THEN
g_cmd = 0
Clean_Pos() '�����
Test_Mode1() '�{(di��o)�ñ��^
elseif g_cmd = 3 THEN
g_cmd = 0
Clean_Pos()
Test_Mode3()
elseif g_cmd = 4 THEN
g_cmd = 0
Clean_Pos()
Test_Mode4()
elseif g_cmd = 5 THEN
g_cmd = 0
Clean_Pos()
Test_Mode5()
elseif g_cmd = 6 THEN
g_cmd = 0
Clean_Pos()
Test_Mode6()
elseif g_cmd = 7 THEN
g_cmd = 0
Clean_Pos()
Test_Mode7()
elseif g_cmd = 25 THEN
g_cmd = 0
Clean_Pos()
Test_Mode25()
elseif g_cmd = 26 THEN
g_cmd = 0
Clean_Pos()
Test_Mode26()
elseif g_cmd = 35 THEN
g_cmd = 0
Clean_Pos()
Test_Mode35()
elseif g_cmd = 36 THEN
g_cmd = 0
Clean_Pos()
Test_Mode36()
endif
wend
GLOBAL SUB Clean_Pos()
RAPIDSTOP(2) '�Sֹͣ
WAIT IDLE(0)
WAIT IDLE(1)
WAIT IDLE(2)
DPOS=0,0,0 '����ǰλ���O(sh��)�Þ�0
MPOS=0,0,0
OP(0,OFF) 'ݔ���P(gu��n)�]
END SUB
GLOBAL SUB Test_Mode1()
TABLE(0,100,150,250,300,400,450)
BASE(0)
'hw_pswitch2���Լ��ľ��_�^(q��), ��ǰ�SĿǰ߀ʣ���ľ��_�^(q��)����ͨ�^?hw_pswitch2(n)��ԃ
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(1, 0, 1, 0, 5,1) '���ӱ��^ݔ����ģʽ1��ݔ����0����һ�����^�cݔ��ON��table��ַ0-5�������\�ӱ��^
TRIGGER '�|�l(f��)ʾ����
MOVE(500)
END SUB
GLOBAL SUB Test_Mode3()
TABLE(0,100,150,250,300,400,450)
HW_TIMER(0)
BASE(0)
VECTOR_MOVED(0) = 0 '�O(sh��)�î�ǰ��ʸ��λ��
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
'ʸ����׃�����ÿ��]��늙C�����׃��, ʸ�����h�������
HW_PSWITCH2(3, 0, 1, 0, 5) '���ӱ��^ݔ����ģʽ3��ݔ����0����һ�����^�cݔ��ON��table��ַ0-5��ʸ�����ˣ�
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(300,200)
MOVEABS(400,0)
END SUB
GLOBAL SUB Test_Mode4()
HW_TIMER(0)
BASE(0)
VECTOR_MOVED(0) = 0 '�O(sh��)�î�ǰ��ʸ��λ��
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(4, 0, 1, 100) '���ӱ��^ݔ����ģʽ4��ݔ����0����һ�����^�cݔ��ON����ʸ��λ��100�_ʼ���^���H���^1�ξͽY(ji��)��
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(100,120)
END SUB
GLOBAL SUB Test_Mode5()
HW_TIMER(0)
BASE(0)
VECTOR_MOVED(0) = 0 '�O(sh��)�î�ǰ��ʸ��λ��, ֻ����늙Cidle����r���O(sh��)��
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(5, 0, 1, 50, 8, 30, 5) '���ӱ��^ݔ����ģʽ5��ݔ����0����һ�����^�cݔ��ON����ʸ��λ��50�_ʼ���^�����^8�Σ��g��
���x30�|�l(f��)���^�����^�|�l(f��)���\�Ӿ��x5�P(gu��n)�]
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(100,100)
MOVEABS(0, 200)
END SUB
GLOBAL SUB Test_Mode6()
HW_TIMER(0)
BASE(0)
VECTOR_MOVED(0) = 0 '�O(sh��)�î�ǰ��ʸ��λ��, ֻ����늙Cidle����r���O(sh��)��
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(6, 0, 1, 50, 15, 30) '���ӱ��^ݔ����ģʽ6��ݔ����0����һ�����^�cݔ��ON����ʸ��λ��50�_ʼ���^�����^15�Σ��g�����x30�|�l(f��)���^
HW_TIMER(2, 100000, 60000, 1, OFF, 0) '��Ч�ƽ�r�g60000us��ÿ���|�l(f��)ݔ��1��
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(100,100) '��һ������
MOVEABS(0, 200)
MOVEABS(-100,100)
MOVEABS(0, 0)
WAIT IDLE
HW_TIMER(0) 'ֹͣӲ�����r��
END SUB
GLOBAL SUB Test_Mode7()
TABLE(0,100,150,250,300,400,450)
BASE(0)
VECTOR_MOVED(0) = 0 '�O(sh��)�î�ǰ��ʸ��λ��, ֻ����늙Cidle����r���O(sh��)��
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(7, 0, 1, 0, 5) '���ӱ��^ݔ��,ģʽ7��ݔ����0����һ�����^�cݔ��ON��table��ַ0-5��ʸ�����ˣ�
HW_TIMER(2, 50000, 30000, 2, OFF, 0) '��Ч�ƽ�r�g30000us��ÿ���|�l(f��)ݔ��2��
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(200,200)
MOVEABS(300,0)
WAIT IDLE
HW_TIMER(0) 'ֹͣӲ�����r��
END SUB
GLOBAL SUB Test_Mode25()
TABLE(0, 0,0, 50,50, 100,100, 50,150, 0,200, -50,150, -100,100, -50,50)
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(25, 0, 0, 10, 8, 0) '���ӱ��^ݔ��,ģʽ25��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-15��8������
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(100,100) '��һ������
MOVEABS(0, 200)
MOVEABS(-100,100)
MOVEABS(0, 0)
END SUB
GLOBAL SUB Test_Mode26()
TABLE(0, 0,0, 50,50, 100,100, 50,150, 0,200, -50,150, -100,100, -50,50)
HW_TIMER(0)
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(26, 0, 1, 10, 8, 0) '���ӱ��^ݔ��,ģʽ26��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-15��8������
HW_TIMER(2, 100000, 50000, 2, OFF, 0) '��Ч�ƽ�r�g50000us��ÿ���|�l(f��)ݔ��2��
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(100,100) '��һ������
MOVEABS(0, 200)
MOVEABS(-100,100)
MOVEABS(0, 0)
WAIT IDLE
HW_TIMER(0) 'ֹͣӲ�����r��
END SUB
GLOBAL SUB Test_Mode35()
TABLE(0, 20,20,20, 40,40,40, 70,70,70, 100,100,100, 140,140,140, 180,180,180)
BASE(0,1,2)
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_PSWITCH2(35, 0, 1, 10, 6, 0) '���ӱ��^ݔ��,ģʽ35��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-18��6������
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(200,200,200) '��ֱ��
END SUB
GLOBAL SUB Test_Mode36()
TABLE(0, 20,20,20, 40,40,40, 70,70,70, 100,100,100, 140,140,140, 180,180,180)
BASE(0,1,2)
HW_PSWITCH2(2) 'ֹͣ���h���]����ɵı��^�c
HW_TIMER(2, 100000, 50000, 1, OFF, 0) '��Ч�ƽ�r�g50000us��ÿ���|�l(f��)ݔ��1��
HW_PSWITCH2(36, 0, 1, 10, 6, 0) '���ӱ��^ݔ��,ģʽ36��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-18��6������
TRIGGER '�|�l(f��)ʾ����ץ�D
MOVEABS(200,200,200) '��ֱ��
WAIT IDLE
HW_TIMER(0) 'ֹͣӲ�����r��
END SUB
�ġ���ͬģʽ����
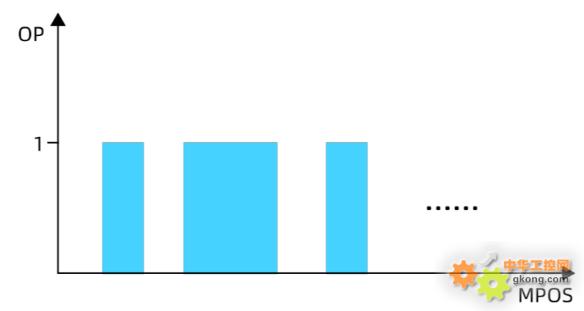
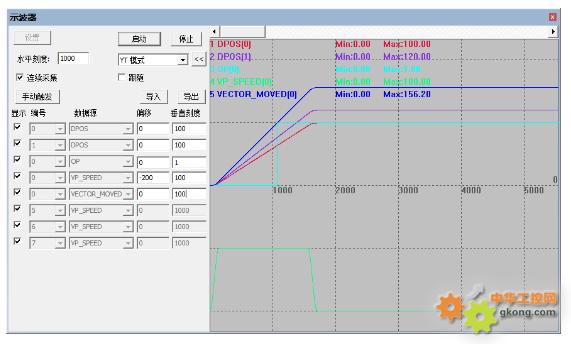
1.Mode=1
��1�����^�c���ˣ� 6��
TABLE(0, 100��150��250��300��400��450)
��2�����ӱ��^ݔ���� ģʽ1��ݔ����0����һ�����^�cݔ��ON��table��ַ0-5�������\�ӱ��^��
HW_PSWITCH2(1, 0, 1, 0, 5, 1)
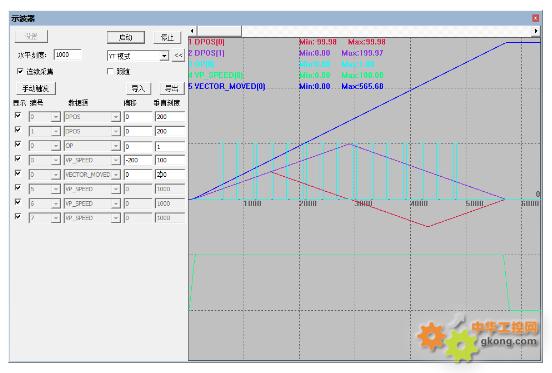
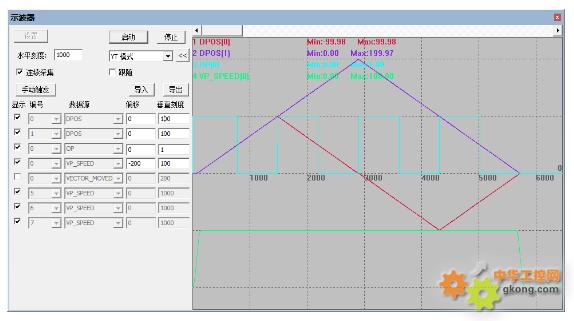
��3��ʾ�����ɘӲ��Σ� �S0ÿ���_һ�����^��λ�ã�OP(0)�|�l(f��)���D(zhu��n)һ�Σ�ֱ�����е�TABLE�ı��^��ɣ�OP�������һ�η��D(zhu��n)�Ġ�B(t��i)��
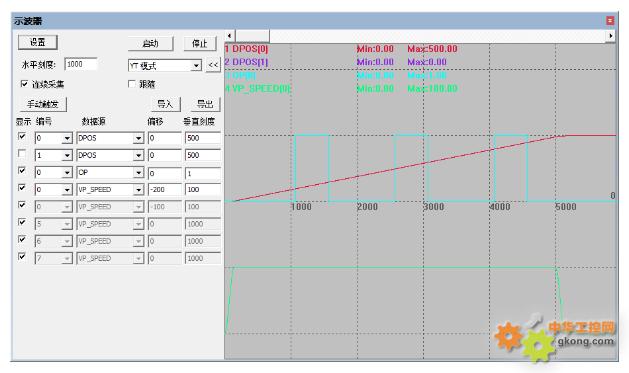
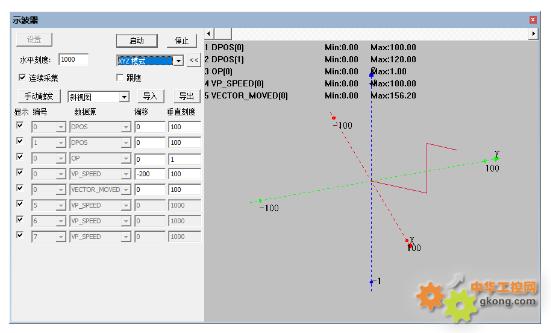
XYģʽ�������@����ݔ���S�S0�\��λ�õ�׃����
2.Mode=3
��1�����^�c���ˣ� 6��ʸ��λ��
TABLE(0, 100��150��250��300��400��450)
��2�����ӱ��^ݔ���� ģʽ3��ݔ����0����һ�����^�cݔ��ON��table��ַ0-5��ʸ�����ˣ���
HW_PSWITCH2(3, 0, 1, 0, 5)
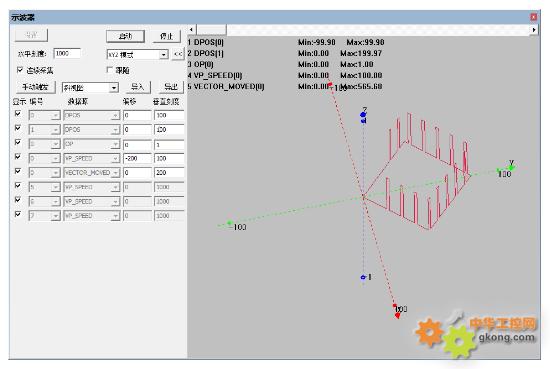
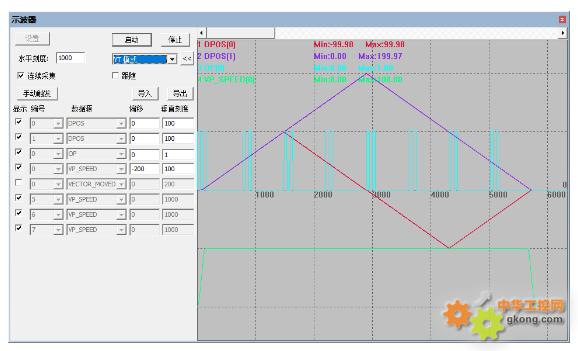
��3��ʾ�����ɘӲ��Σ� �S0�S1���a��ʸ���ϳ�λ��VECTOR_MOVED(0)ÿ���_һ�����^��λ�ã�OP(0)�|�l(f��)���D(zhu��n)һ�Σ���ֱ�����е�TABLE�ı��^��ɣ�OP�������һ�η��D(zhu��n)�Ġ�B(t��i)��
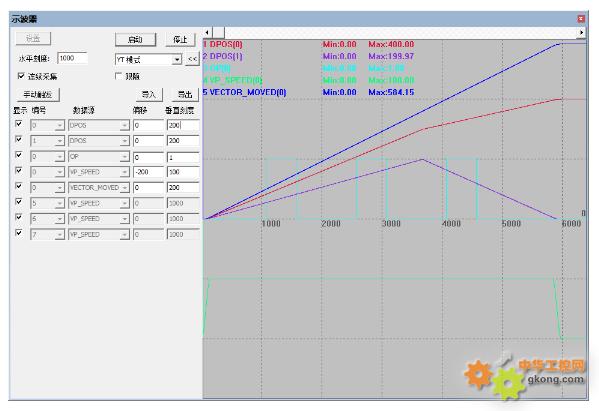
XYZģʽ�������@����ݔ���S���a�\��λ�õ�׃����
3.Mode=4
��ʹ��TABLE��
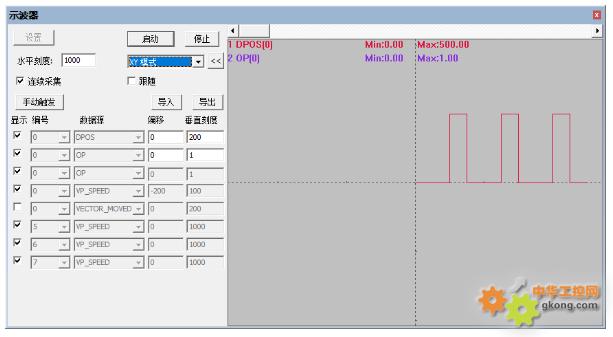
��1�����ӱ��^ݔ���� ģʽ4��ݔ����0����һ�����^�cݔ��ON�����^�cʸ������100��
HW_PSWITCH2(4, 0, 1, 100)
��2��ʾ�����ɘӲ��Σ� �S0�S1���a��ʸ���ϳ�λ��VECTOR_MOVED(0)���_100ʸ�����^λ�ã�OP(0)�|�l(f��)���D(zhu��n)һ�Σ����^��ɡ�
XYZģʽ�������@����ݔ���S���a�\��λ�õ�׃����
4.Mode=5
��ʹ��TABLE��
��1�����ӱ��^ݔ���� ģʽ5��ݔ����0����һ�����^�cݔ��ON����ʸ��λ��50�_ʼ���^�����^8�Σ��g�����x30�|�l(f��)���^�����^�|�l(f��)���\�Ӿ��x5�P(gu��n)�]��
HW_PSWITCH2(5, 0, 1, 50, 8, 30, 5)
��2��ʾ�����ɘӲ��Σ� �S0�S1���a��ʸ���ϳ�λ��VECTOR_MOVED(0)���_һ��ʸ�����^λ��50��OP(0)�|�l(f��)���D(zhu��n)һ�Σ����m(x��)ÿ�g��30���^һ�δ��_OP�����\��5�����x�P(gu��n)�]OP���؏�(f��)���^8�κ�Y(ji��)�����^��
XYZģʽ�������@����ݔ���S���a�\��λ�õ�׃����
5.Mode=6
��ʹ��TABLE��
��1�����ӱ��^ݔ���� ģʽ6��ݔ����0����һ�����^�cݔ��ON����ʸ��λ��50�_ʼ���^�����^15�Σ��g�����x30�|�l(f��)���^
HW_PSWITCH2(6, 0, 1, 50, 15, 30)
��2��ݔ���}�_���ȣ� Ӳ�����r����100000us��ݔ���}�_�Č��Ȟ�60000us��ÿ�α��^ݔ��1���}�_��
HW_TIMER(2, 100000, 60000, 1, OFF, 0)
��3��ʾ�����ɘӲ��Σ� �S0�S1���a��ʸ���ϳ�λ��VECTOR_MOVED(0)���_һ��ʸ�����^λ��50��OP(0)�|�l(f��)���D(zhu��n)һ�Σ����m(x��)ÿ�g��30���^һ�δ��_OP��60000us���P(gu��n)�]OP���؏�(f��)���^15�κ�Y(ji��)�����^��
XYZģʽ�������@����ݔ���S���a�\��λ�õ�׃����
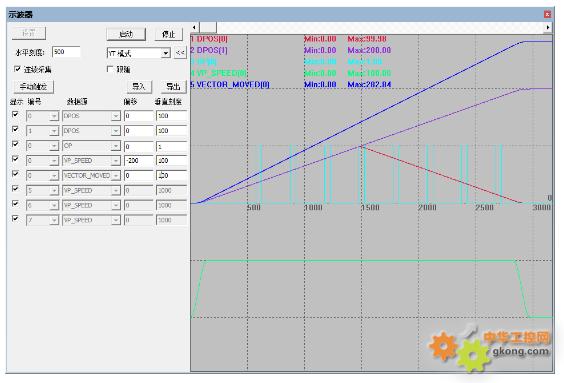
6.Mode=7
��1�����^�c���ˣ� 6��ʸ��λ��
TABLE(0 , 100��150��250��300��400��450)
��2�����ӱ��^ݔ���� ģʽ7��ݔ����0����һ�����^�cݔ��ON��TABLE��ַ0-5��ʸ�����ˣ�
HW_PSWITCH2(7, 0, 1, 0, 5)
��3��ݔ���}�_���ȣ� Ӳ�����r����50000us��ݔ���}�_�Č��Ȟ�30000us��ÿ�α��^ݔ��2���}�_��
HW_TIMER(2, 50000, 30000, 2, OFF, 0)
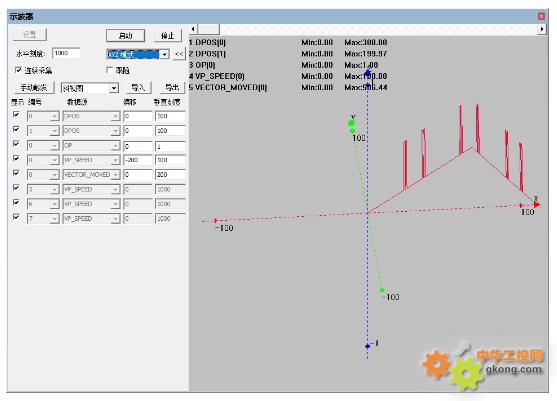
��4��ʾ�����ɘӲ��Σ� �S0�S1���a��ʸ���ϳ�λ��VECTOR_MOVED(0)ÿ���_һ��TABLEλ��OP(0)�|�l(f��)һ�Σ�ÿ���|�l(f��)ݔ�� 2������50000us����Чݔ��30000us���}�_�����P(gu��n)�]OP��ֱ�����е�TABLE�c�����^��ɡ�
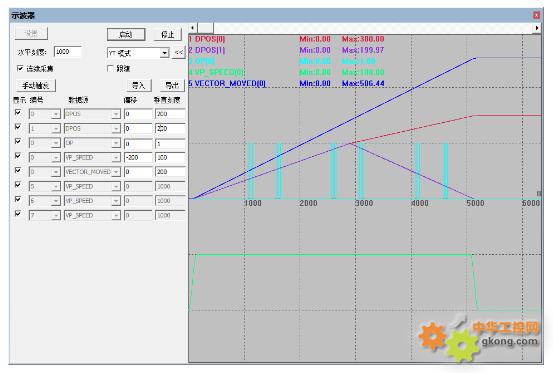
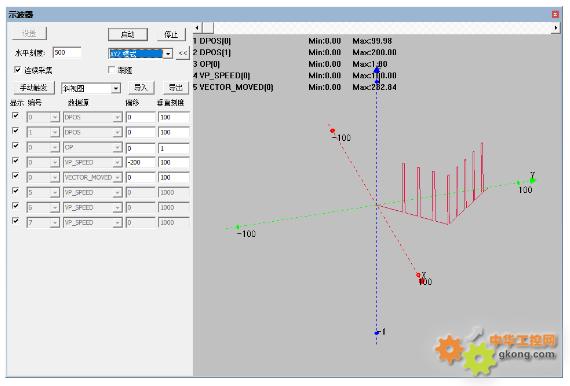
XYZģʽ�������@����ݔ���S���a�\��λ�õ�׃����
7.Mode=25
��1�����^�c���ˣ� 8����ռ��16��TABLE
TABLE(0, 0��0��50��50��100��100��50��150��0��200��-50��150��-100��100��-50��50)
��2�����ӱ��^ݔ���� ģʽ25��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-15��8�����ˡ�
HW_PSWITCH2(25, 0, 1, 10, 8, 0)
��3��ʾ�����ɘӲ��Σ� �S0�S1ÿ���_һ�����^��XYλ�ã�OP(0)�|�l(f��)���D(zhu��n)һ�Σ�ֱ�����е�TABLE�c���^��ɣ�OP�������һ�η��D(zhu��n)�Ġ�B(t��i)��
XYZģʽ�������@����ݔ���S���a�\��λ�õ�׃����
8.Mode=26
��1�����^�c���ˣ� 8����ռ��16��TABLE
TABLE(0, 0�� 0�� 50�� 50�� 100��100�� 50 �� 150 �� 0 �� 200 �� -50 �� 150 �� -100 �� 100 �� -50 �� 50)
��2�����ӱ��^ݔ���� ģʽ26��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-15��8�����ˡ�
HW_PSWITCH2(26, 0, 1, 10, 8, 0)
��3��ݔ���}�_���ȣ� Ӳ�����r����100000us��ݔ���}�_�Č��Ȟ�50000us��ÿ�α��^ݔ��2���}�_��
HW_TIMER(2, 100000, 50000, 2, OFF, 0)
��4��ʾ�����ɘӲ��Σ� �S0�S1ÿ���_һ��TABLE�ı��^XYλ�ã�OP(0)�|�l(f��)��ÿ���|�l(f��)ݔ��2������100000us��ݔ���}�_�Č��Ȟ�50000us���}�_����ֱ�����е�TABLE�c���^��ɣ�OP�������һ�η��D(zhu��n)�Ġ�B(t��i)��
XYZģʽ�������@����ݔ���S���a�\��λ�õ�׃����
9.Mode=35
��1�����^�c���ˣ� 6����ռ��18��TABLE
TABLE(0��20 ��20 ��20��40 ��40 ��40��70 ��70 ��70��100 ��100 ��100��140��140��140�� 180��180��180)
��2�����ӱ��^ݔ���� ģʽ35��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-18��6������
HW_PSWITCH2(35, 0, 1, 10, 6, 0)
��3��ݔ���}�_���ȣ� Ӳ�����r����100000us��ݔ���}�_�Č��Ȟ�50000us��ÿ�α��^ݔ��1���}�_��
HW_TIMER(2, 100000, 50000, 1, OFF, 0)
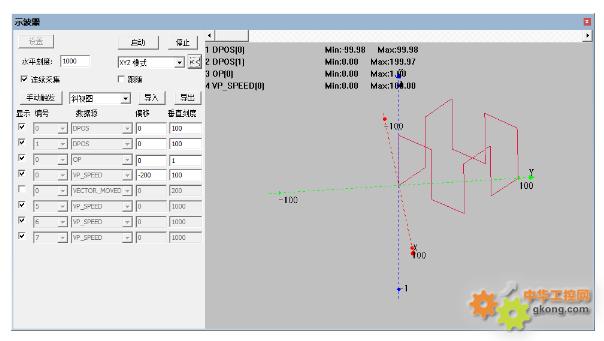
��4��ʾ�����ɘӲ��Σ� �S0�S1�S2ÿ���_һ��TABLE�ı��^XYZλ�ã�OP(0)�|�l(f��)���D(zhu��n)һ�Σ�ֱ�����е�TABLE�c���^��ɣ�OP�������һ�η��D(zhu��n)�Ġ�B(t��i)��
10.Mode=36
��1�����^�c���ˣ� 6����ռ��18��TABLE
TABLE(0 , 20 �� 20 �� 20�� 40 �� 40 �� 40 �� 70 �� 70 �� 70�� 100 �� 100 �� 100�� 140 �� 140 �� 1 40�� 180 �� 180 �� 180)
��2�����ӱ��^ݔ���� ģʽ36��ݔ����0����һ�����^�cݔ��ON���}�_ƫ��10��table��ַ0-18��6�����ˡ�
HW_PSWITCH2(36, 0, 1, 10, 6, 0)
��3��ݔ���}�_���ȣ� Ӳ�����r����100000us��ݔ���}�_�Č��Ȟ�50000us��ÿ�α��^ݔ��1���}�_��
HW_TIMER(2, 100000, 50000, 1, OFF, 0)
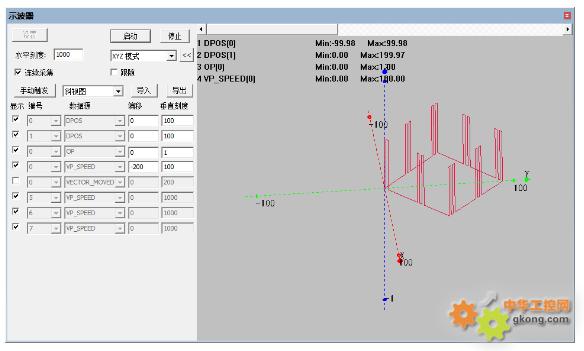
��4��ʾ�����ɘӲ��Σ� �S0�S1�S2ÿ���_һ��TABLE�ı��^XYZλ�ã�OP(0)�|�l(f��)��ÿ���|�l(f��)ݔ��1������100000us��ݔ���}�_�Č��Ȟ�50000us���}�_����ֱ�����е�TABLE�c���^��ɣ�OP�������һ�η��D(zhu��n)�Ġ�B(t��i)��
11.ҕ�l��ʾ
���Σ����\�Ӽ��g(sh��)�\�ӿ�����PSOλ��ͬ��ݔ��(��):PSOģʽԔ�⣬�ͷ������@�
���ྫ�ʃ�(n��i)��Ո�P(gu��n)ע“���\��С����”����̖����Ҫ���P(gu��n)�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\�Ӽ��g(sh��)�N�۹��̎���
���������\�Ӽ��g(sh��)ԭ��(chu��ng)���gӭ����D(zhu��n)�d����ͬ�W(xu��)��(x��)��һ������Ї���������ˮƽ�����°��(qu��n)�w���\�Ӽ��g(sh��)���У������D(zhu��n)�dՈע������Դ��
���\�Ӽ��g(sh��)��ע���\�ӿ��Ƽ��g(sh��)�о���ͨ���\�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g(sh��)��I(y��)�����\�Ӽ��g(sh��)�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈԳ�������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\�ӿ��ƻ��A(ch��)���g(sh��)���о����LJ���(n��i)�����I(l��ng)��l(f��)չ������I(y��)֮һ��Ҳ�LJ���(n��i)���С����������\�ӿ��ƺ��ļ��g(sh��)�͌��r����ܛ��ƽ�_���g(sh��)����I(y��)����Ҫ�I(y��)��(w��)�У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y(t��ng)_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ�ȵȡ�
|

