����(ji��)��(n��i)����Ҫ�������ׂ����֣�֧��PSO���ܵ�Ӳ����PSO���g(sh��)�����c�����\(y��n)�ӿ�������ʹ����Щ����F(xi��n)PSO���ܡ�PSOʹ�õİ����f�������걾��(ji��)��(n��i)�ݣ����Ŵ�Ҿ����˽�PSO��ʹ�÷������¹�(ji��)�҂��������v�⡣
Ӳ��ƽ�_�h(hu��n)���
һ��Ӳ���f��
Ӳ���x�͵���ҪҪ����֧��PSO���ܣ��ٷ���PSO�đ�(y��ng)�È��Ϻ��S��(sh��)���x����w����̖��
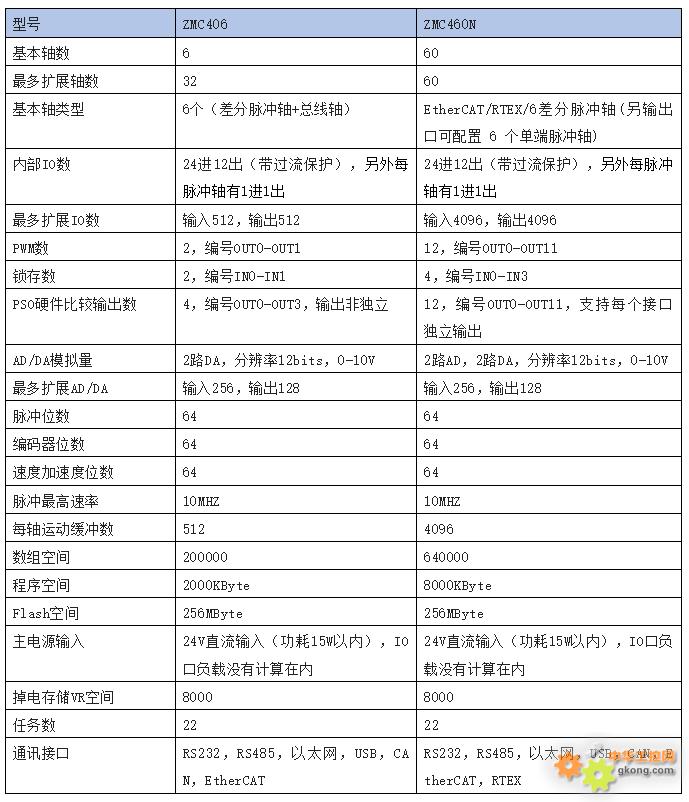
������ZMC406�����\(y��n)�ӿ� ������ZMC460N�p�����\(y��n)�ӿ���������չ�_��B��PSO���õ�ָ����Ҳ���Q��Ӳ�����^ݔ����������Ҳ����Ӳ�����^ݔ������PSO��
ZMC406����������
ZMC406���������������\(y��n)�Ӽ��g(sh��)�Ƴ�����һ���W(w��ng)�j(lu��)6�S�\(y��n)�ӿ���������ͨ�^�U(ku��)չģ�K��U(ku��)չ�S��֧�ֶ��_(d��)32�S�����Ԏ������}�_�S�ӿڰ�������}�_ݔ���Ͳ�־��a��ݔ�룩��֧���}�_�(q��)������EtherCAT�����(q��)�������ʹ�á�
�}�_ݔ���l�������_(d��)10MHZ��EtherCAT������ͨӍ���������_(d��)250�롣
֧��4·PSOݔ����ݔ���ڷǪ�����������·ͬ�rݔ����ÿ��ϵ�y(t��ng)���ڱ��^ݔ��һ�Σ���ÿ��ϵ�y(t��ng)����ֻ��ݔ��һ·���^��̖��
ZMC460N�p����������
ZMC460N�p�������������ZMC406�������YԴ���࣬�����\(y��n)�Ӽ��g(sh��)�Ƴ�����һ���W(w��ng)�j(lu��)60�S�\(y��n)�ӿ�������֧��EtherCAT�����S+RTEX�����S+�}�_�S���ʹ�ã����Ԏ������}�_�S�ӿڣ���������}�_ݔ���Ͳ�־��a��ݔ�룩��ͨ��ݔ����֧�����Þ�ζ��}�_ݔ����ͨ��ݔ���֧�����óɆζ˾��a��ݔ�롣
�}�_ݔ���l�������_(d��)10MHZ��EtherCAT������ͨӍ���������_(d��)250�롣
֧��12·PSOݔ����ݔ���ڪ�����֧��12·ͬ�rݔ����ÿ��ϵ�y(t��ng)���ڿɱ��^ݔ����Σ���(y��ng)�È��������S����

�@�ɿ������ͬ�ٸ�ϵ�У�����(qi��ng)���ܝM���N���ϵ�����֧��ֱ�����a(b��)���B�m(x��)���a(b��)������A�����a(b��)�����g�A�����������a(b��)�����݆������X݆��λ���i�桢ͬ�����S��̓�M�S�O(sh��)�á�Ӳ�����^ݔ����Ӳ�����r�����\(y��n)���о���(zh��n)ݔ���ȹ��ܣ����Ã�(y��u)���ľW(w��ng)�j(lu��)ͨӍ�f(xi��)�h���Ԍ��F(xi��n)���r���\(y��n)�ӿ��ơ�
��(y��ng)�ó������ʹ�����\(y��n)�������аl(f��)��ZDevelopܛ���_�l(f��)����VC��VB��VS��C++Builder��C#����λ�C(j��)ܛ�����_�l(f��)����λ�C(j��)�_�l(f��)�{(di��o)ԇ�r����ZDevelopܛ��ͬ�r�B�ӵ��������������\(y��n)�Еr��Ҫ�ӑB(t��i)��“zmotion.dll”��
������ZDevelopܛ���_�l(f��)������
�������Ļ�������(sh��)�f�����±���
��PSOӲ�����^ݔ������ʹ�õ��Ǹ���IO�ڣ�푑�(y��ng)�l�ʞ�1MHz�� 푑�(y��ng)�ٶȿ��Ծ��_���뼉�e��
�Ñ�����ʹ��ZDevelopܛ���B�ӿ���������ZDevelopܛ�����ھ�����ڰl(f��)��“?*max”��ӡ�鿴���������Ҏ(gu��)��(sh��)��“?*set”�鿴��ӡָ���(sh��)ֵ��?*port��ӡͨӍͨ����
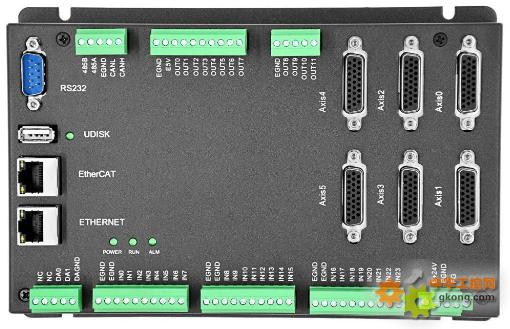
1.�D��ZMC406�����������ą����ܘ�(g��u)��
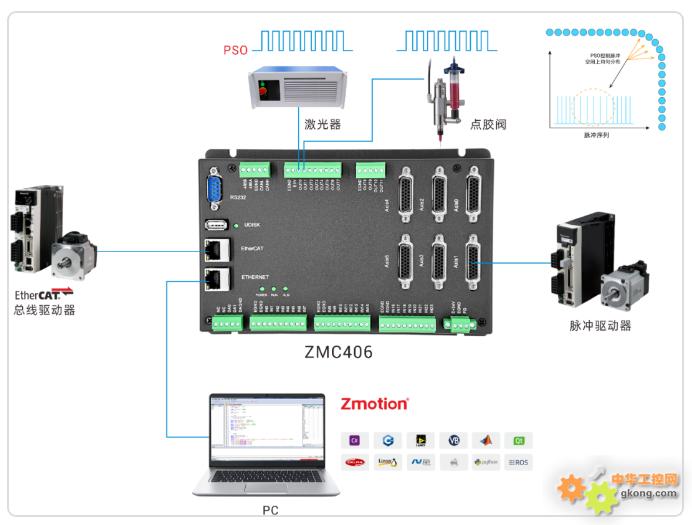
ZMC406���� �������ij��ýӿ��f�����±���

2.�D��ZMC460N�p�����������ą����ܘ�(g��u)��
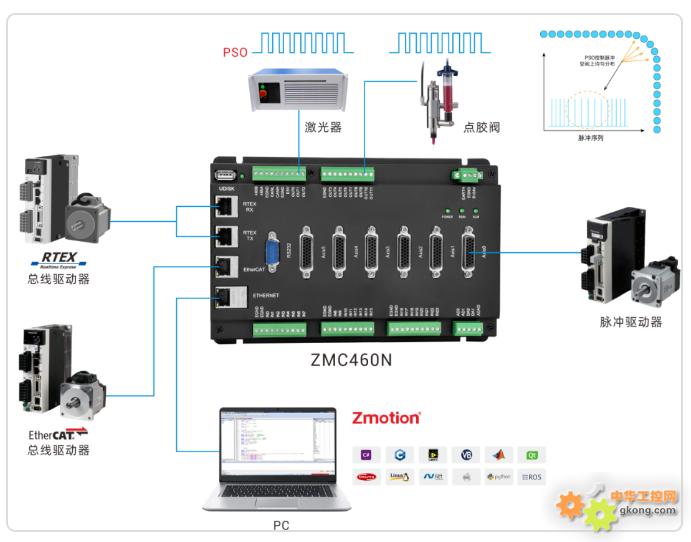
ZMC460N�p�����������ij��ýӿ��f�����±���
�Ѿ���ͨ�^CAN������EtherCAT�����U(ku��)չIO�YԴ���S�YԴ��
����PSO�ļ��g(sh��)��B
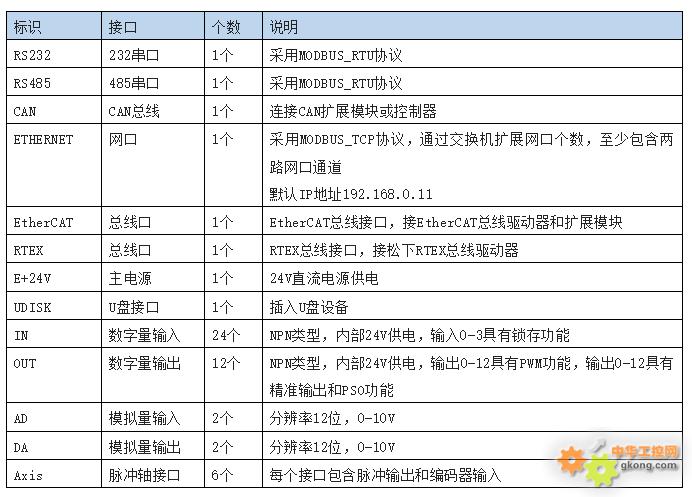
PSO(position synchronized output)��λ��ͬ��ݔ�������|(zh��)��ͨ�^�ɼ����r�ľ��a������λ��(�o���a����ʹ��ݔ�����}�_λ��)�c���^ģʽ�O(sh��)����λ���M(j��n)�б��^������OP����ͬ��ݔ����̖��PSOʾ��D���¡�
PSOһ���c������ (���c�z�����y���O(sh��)��) ͬ��ݔ����̖�M(j��n)����λͬ�������\(y��n)��܉�E�������A���Ժ㶨�Ŀ��g(���ߺ㶨�r�g)�g���|�l(f��)ݔ���_�P(gu��n)���������١��p�ٺ̈́��ٶΣ��Ķ����F(xi��n)�}�_��������������ڱ��ӹ����w�ϡ�
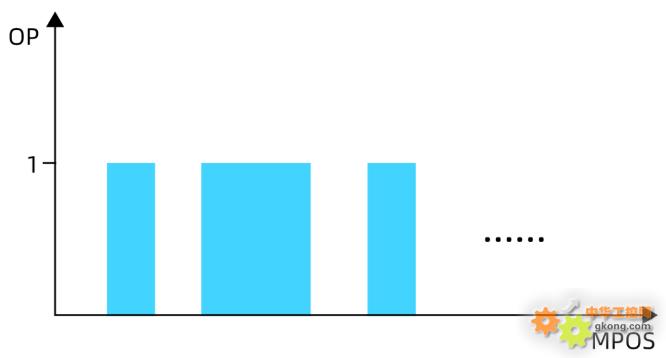
��PSO���ܵ����c�����ܸ����ҷ�(w��n)����ݔ����̖ �� ���ݔ���������ߣ������܉��������\(y��n)��܉�E���Թ̶��ľ��x�|�l(f��)ݔ����̖�����ÿ��]���w�ٶȡ�
����ֱ�������Ժܿ���ٶ��\(y��n)�ӣ����ڈA�Dz��֜p�ٵ�ͬ�rҲ�ܱ��Cݔ���g��㶨��ͨ���A�Ǽӹ������������ӹ��^����ռ�б��^С�IJ��֣��@���ڱ��C�ӹ�Ч����ͬ�r���Ϳ�������ȵ���߮a(ch��n)�ܡ�
����PSO���P(gu��n)ָ���B
���F(xi��n)PSO���ܣ���Ӳ�����^ݔ��������ʹ�õ�������Ҫ��“HW_PSWITCH2”��“MOVE_HWPSWITCH2”��“HW_TIMER”�ȣ�ǰ�ɂ�ָ����Ҫ�����O(sh��)���|�l(f��)���^ݔ���ľ��x������������Ӳ�����r�������ǰ��ʹ�þ���(zh��n)����ݔ���}�_�Č��ȡ�
1 . HW_PSWITCH 2 -- Ӳ��λ�ñ��^ݔ��
��1��ָ���f��
ͨ�^�O(sh��)�ñ��^�l��������OP���B�m(x��)����ݔ����̖�����������ʹ��֧��Ӳ�����^ݔ����ݔ���ڣ�����ZMC406����ʹ��OUT0/1/2/3�ڣ�ZMC460��OUT0-11����ʹ�á�
֧�ֱ��^�}�_�S��λ�á����a���ķ���λ�úͿ����S��λ�á��x�úηNλ����Ϣ���^���c�O(sh��)�õ�ATYPE�S������P(gu��n)�����^�����S�����a��ݔ��r���Ԅ�ʹ�þ��a��λ�Á��|�l(f��)���������a���Ĉ��ϱ���^�}�_ݔ����
����ʹ��“MOVEOP_DELAY”����(sh��)���{(di��o)��ݔ����(zh��n)�_�r�̡�
��2��ע�����
һ�������ÿ��ϵ�y(t��ng)���ڃ�(n��i)ֻ�ܱ��^һ�Σ�ϵ�y(t��ng)����ͨ�^“SERVO_PERIOD”��ԃ���˕r��(d��ng)ϵ�y(t��ng)�����^��r�������^ݔ���}�_����С��ϵ�y(t��ng)���ڕr������(d��o)��ݔ�����������ֿ�������ZMC460N��ZMC504SCAN�ȣ�ÿ��ϵ�y(t��ng)����֧�ֱ��^��Σ���֧�ֶ������^ݔ������ͬһ����ݔ�����^��̖��
��“HW_PSWITCH2”�c“MOVE_OP”����(zh��n)ʹ��ͬ�ӵ�Ӳ���YԴ�������h��ͬһ��ͨ��ͬ�rʹ�ã������ڲ�ͬ��ͨ��ͬ�rʹ�á�
�{(di��o)��TABLEλ�Ô�(sh��)��(j��)�r�������б��^�c���ǰ��Ҫ��TABLE��
ʹ���}�_��늙C(j��)�rֻ��ATYPE��4�r���DZ��^����λ��(MPOS)��Ĭ�J(r��n)���S��ATYPE��1��7���^��������λ��(DPOS)��
��3��ָ���Z��
HW_PSWITCH2(mode, [...])
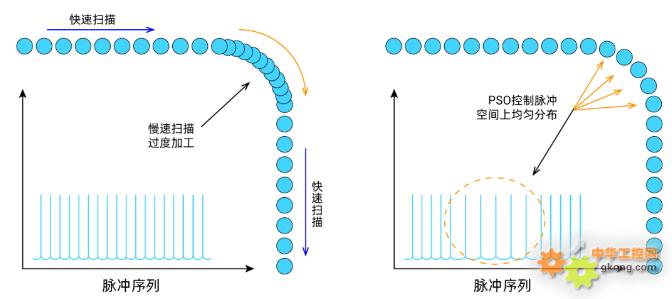
modeģʽ��ͬ��������Ҫ��ą���(sh��)Ҳ��ͬ��Ԕ���腢��Basic�փԵ��Z���f����
�e�ɂ������ҵ��͵�ģʽչ�_������
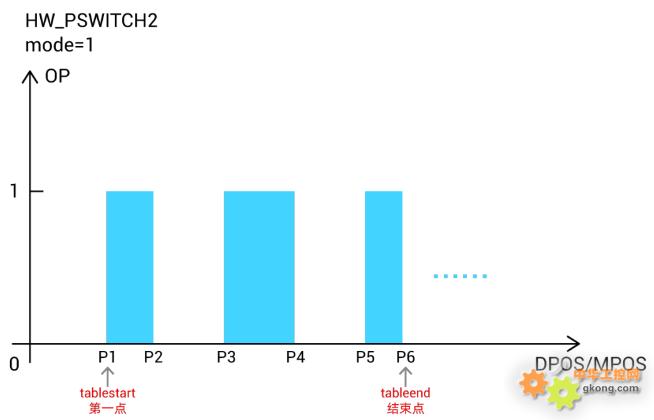
A.Mode=1�����S���^
HW_PSWITCH2( mode,opnum,opstate,tablestart,tableend[,direction])
mode��1-���ӱ��^��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
tablestart����һ�����^�c�^������(bi��o)����TABLE��̖
tableend�����һ�����^�c�^������(bi��o)����TABLE��̖
direction����һ���c�Д��0����(bi��o)ؓ(f��)��1����(bi��o)����-1��ʹ�÷���
��ģʽ�^�麆�Σ���Ҫ����TABLE�Ĵ���������Ҫ���^ݔ����λ������(bi��o)�ȴ惦��TABLE�Ĵ�����Ȼ��PSO����OP��ÿ���_(d��)һ�����^�c��λ�ñ㷴�D(zhu��n)һ�Σ�ֱ��ȫ������(bi��o)�c���^��ɡ�ʾ��D���£�P��ʾ���^�c��չʾ�������^�c��OPݔ����r��
B.Mode=2��������^�c
HW_PSWITCH2(2)
mode��2-ֹͣ���h���]��ɵı��^�c
��ʹ��ǰ��Ҫ�{(di��o)�ô�ģʽ��������ܛ]�б��^��ɵĔ�(sh��)��(j��)��ʹ���^����Ҳ���l(f��)�ʹ����ֹͣ���^��
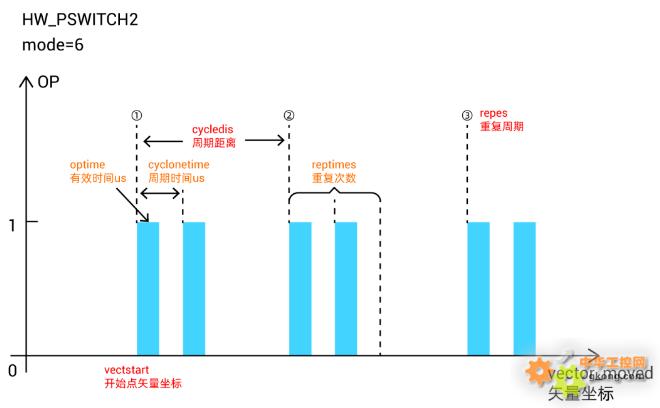
Mode=6��ʸ�����^��ʽ������ģʽ���cHW_TIMERһ��ʹ��
HW_PSWITCH2( mode, opnum, opstate, vectstart, repes, cycledis)
mode��6-���ӱ��^��
opnum������(y��ng)��ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
vectstart�����^�cVECTOR_MOVED��(d��ng)ǰ�\(y��n)�Ӿ��x
repes���؏�(f��)���ڣ�һ������ֻ���^һ��
cycledis�����ھ��x��ÿ���@�����xݔ��һ��
��ģʽ������(f��)�sһЩ�����^ݔ���Ĕ�(sh��)��(j��)������TABLE��ֻ��ָ����һ���|�l(f��)�c��“VECTOR_MOVED”�����^���ڵĴΔ�(sh��)��ÿ��ݔ���|�l(f��)�ľ��x��“HW_TIMER”����ÿ���_(d��)һ�������|�l(f��)λ��ݔ�����}�_���ȺʹΔ�(sh��)������(sh��)�O(sh��)�ÿɅ����·�ʾ��D���tɫ����(sh��)��HW_PSWITCH2ָ��ą���(sh��)����ɫ����(sh��)��HW_TIMERָ��ą���(sh��)��
��ģʽ�漰�ľ��x����(bi��o)����ʸ������(bi��o)�������چ��S�\(y��n)�ӻ���a(b��)�\(y��n)��ģʽ�±��^ݔ����
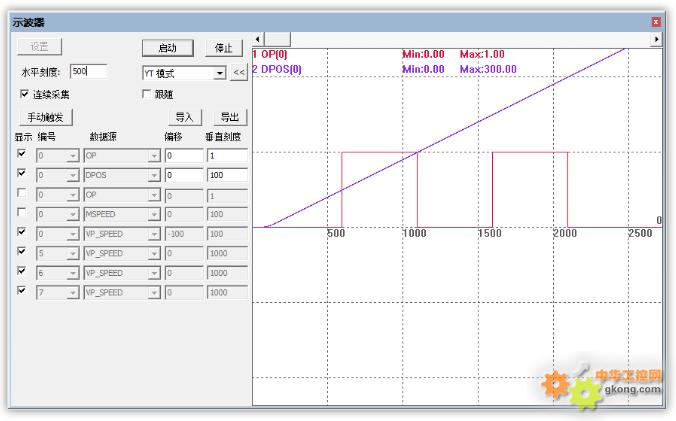
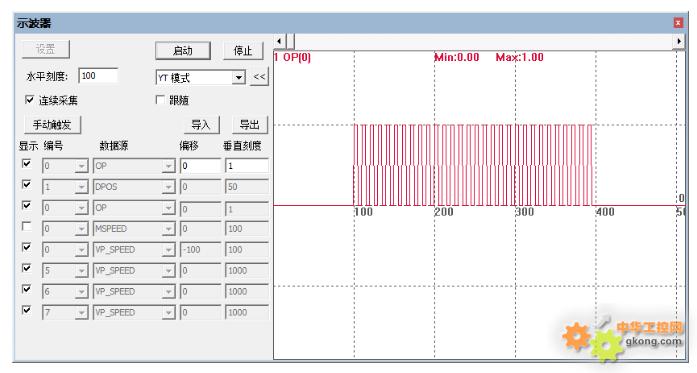
��һ�� mode=1�����Sģʽ�����^TABLE��λ���c��
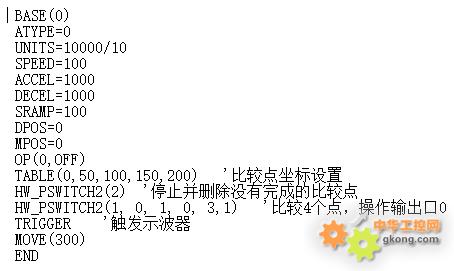
ʾ�����ɘӲ������£� ���_(d��)TABLE���Ă�����(bi��o)�c50,100,150,200��OP���D(zhu��n)��
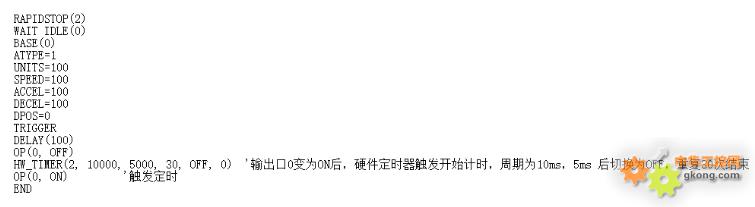
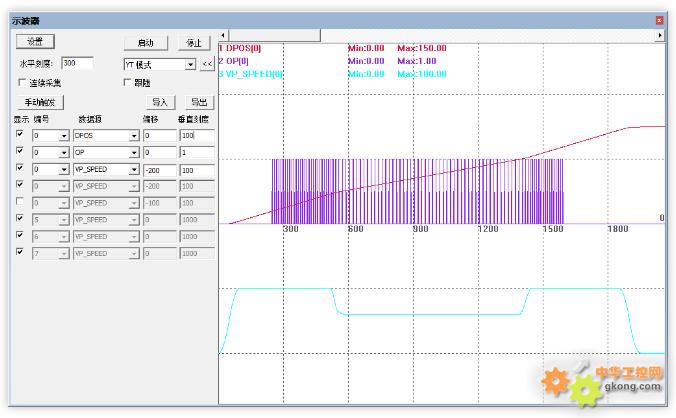
������ mode=6������ģʽ���Y(ji��)��HW_TIMERʹ�á�
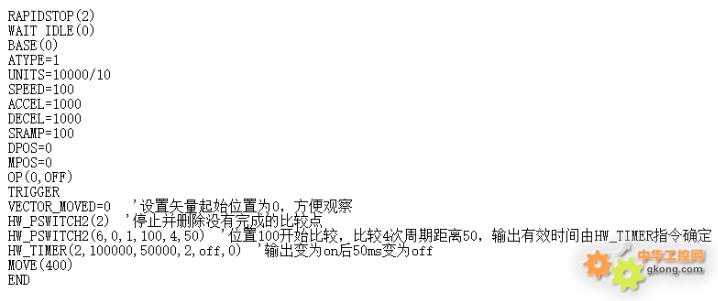
ʾ�����������£�
ݔ���ڞ�OP(0)����һ�α��^ݔ���Ġ�B(t��i)��ON����һ��ݔ���c��ʸ������(bi��o)��100�����^4�Σ��g��50�ľ��x�|�l(f��)һ�Ρ�
ÿ���|�l(f��)֮��ݔ��OP�ĕr�g��HW_TIMERָ���O(sh��)�ã�HW_TIMER����(sh��)�_��ÿ��ݔ���}�_�����ڞ�100 ms����Ч���Ȟ�50ms��ÿ�����^λ���B�m(x��)�|�l(f��)2�Ρ�
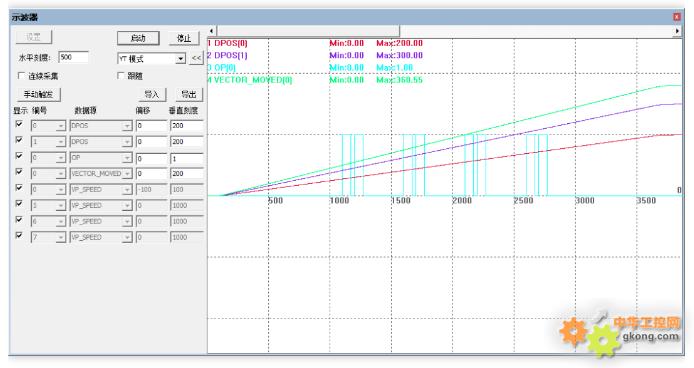
YTģʽ�²��Σ�
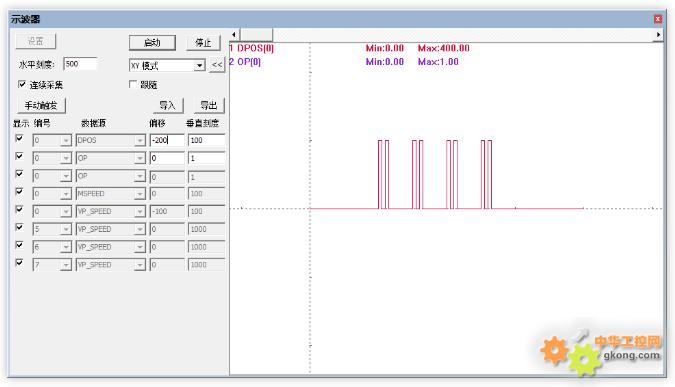
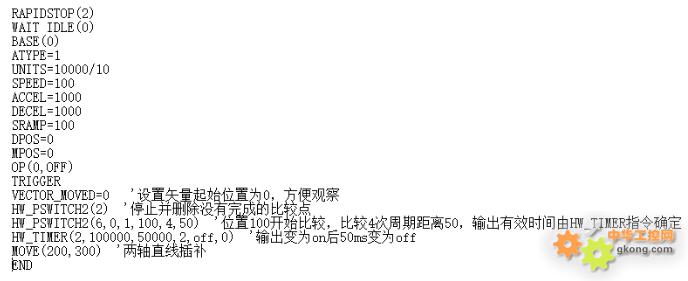
�����l����׃�������S�\(y��n)�ӸĞ�MOVE(200,300)���S���a(b��)���������£�����(j��)���S�ĺϳ�ʸ��λ��VECTOR_MOVED�M(j��n)�б��^��
�������£�
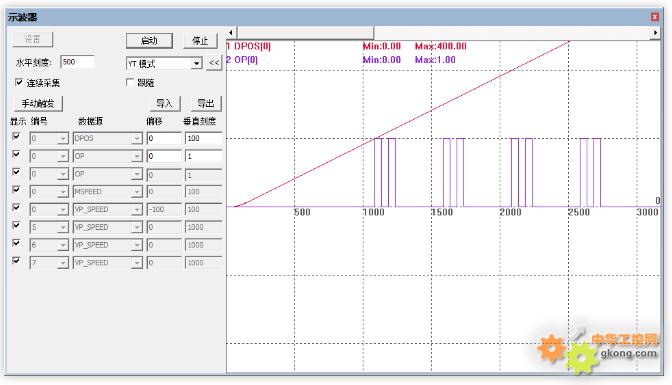
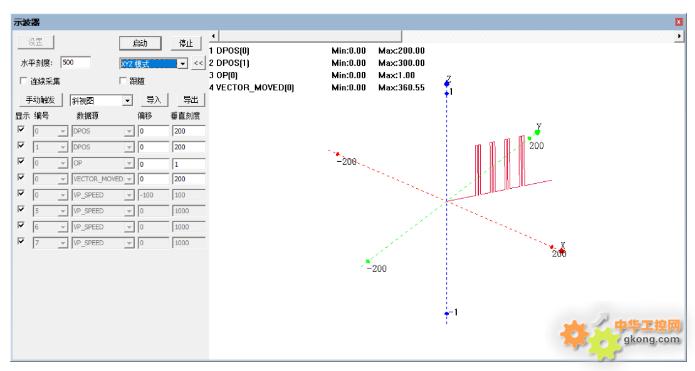
XYZģʽ��ݔ���������£�
2.HW_TIMER -- Ӳ�����r
��1�� ָ���f��
Ӳ�����r��������Ӳ�����^ݔ����һ�Εr�g��߀ԭ�ƽ��“ HW_TIMER”ֻ��1����ÿ���{(di��o)�Õ���(qi��ng)��ֹ֮ͣǰ���{(di��o)�á�
OP��MOVE_OP�������P(gu��n)�]�����M(j��n)�е�HW_TIMER�}�_���@�ӿ���ʹ��HW_TIMER�팍�F(xi��n)���PWM�Ĺ��ܣ�OPݔ�����_�}�_ݔ������һ��OPݔ���P(gu��n)�]�}�_ݔ������(d��ng)ʹ��MOVE_OP����(zh��n)ݔ���r�����Ԍ��F(xi��n)����(zh��n)��PWMݔ���o���}�_���ܡ�
ʹ��“?*HW_TIMER”���Կ���߀�ж����}�_ʣ�ࡣ
��2��ע�����
ÿ������ݔ��һ����̖��ָ������ڕr�g���O(sh��)��һ��Ҫ����ϵ�y(t��ng)���ڣ���tݔ�������� ݔ������Ҫָ��֧��PSO���ܵ�OP�ڡ�
��3��ָ���Z��
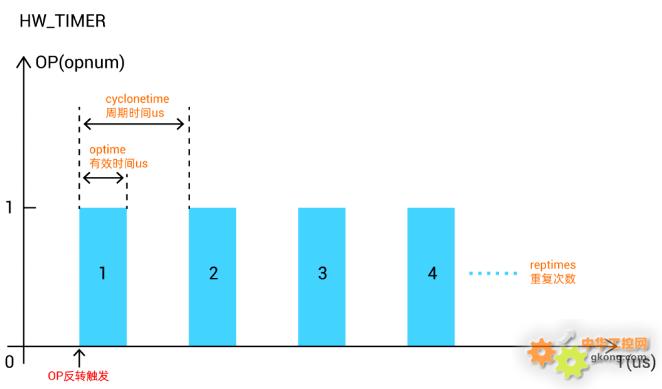
HW_TIMER(mode, cyclonetime, optime, reptimes, opstate, opnum )
mode��0ֹͣ��2-����
cyclonetime�����ڕr�g��us��λ
optime����Ч�r�g��us��λ
reptimes���؏�(f��)�Δ�(sh��)������ģʽ��reptimes =0�r��ܛ�P(gu��n)�]HW_TIMER��ԭ�����}�_�]����ɵģ����^�m(x��)ݔ�����
opstate��ݔ��ȱʡ��B(t��i)��ݔ����׃?y��u)�Ǵˠ�B(t��i)���_ʼӋ�r
opnum��ݔ���ھ�̖�������Ӳ�����^ݔ���Ŀ�
����(sh��)�O(sh��)�ÿɅ����·�ʾ��D����ָ���Ч���ǹ̶��r�g����ݔ����
���ӣ�
ʾ�����ɘ�OP(0)�������£� �ɘ������O(sh��)�Þ�1ms����ʾ�M�S�r�g�Ć�λ��1ms���ӕr100ms֮���_ʼ�|�l(f��)OP����ݔ����ָ�����õĿ��r�g��“10000us*30”�� ����������(sh��)�{(di��o)��ݔ���}�_�Č��ȡ�
3.MOVE_ HWPSWITCH2 -- ���_Ӳ�����^ݔ��
������ܺ��÷�ͬ“HW_PSWITCH2”���^(q��)�e�Ǵ�������M(j��n)�\(y��n)�Ӿ��_�^(q��)���ھ��_�Ј�(zh��)�б��^��
PSOָ���f��
�������g��ݔ���}�_������
����“HW_PSWITCH2”ָ���ģʽ6���Y(ji��)��“HW_TIMER”���Ɔ��S���ٵȾ�ݔ����

����ZDevelop�鿴PSO����
1.ʾ�����ɘ������������¡�
���Ά��Sֱ���\(y��n)�ӣ����^������λ��20-120��ÿ��һ����λ���x���^һ�Σ������^100�Σ����g�������ǵȾ���^���\(y��n)���ٶ��^С����OP���D(zhu��n)���ٶ�׃����OP���ָ��ƽ�ĕr�g��2ms��
2.XYģʽ��OP�S�\(y��n)�Ӿ��x׃���IJ������¡�
�ɿ����Ⱦ���^ģʽ�£����^ݔ�������\(y��n)���ٶȵ�Ӱ푣�ݔ��ʼ�K�Ǿ���ġ�

ҕ�l��ʾ
���Σ����\(y��n)�Ӽ��g(sh��)�\(y��n)�ӿ�����PSOλ��ͬ��ݔ��(һ):Ӳ��ƽ�_�cPSOָ��飬 �ͷ������@�
���ྫ�ʃ�(n��i)��Ո�P(gu��n)ע“ ���\(y��n)��С���� ”����̖����Ҫ���P(gu��n)�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\(y��n)�Ӽ��g(sh��)�N�۹��̎���400-089-8936��
���������\(y��n)�Ӽ��g(sh��)ԭ��(chu��ng)���gӭ��� �D(zhu��n) �d �� �� ͬ �W(xu��) ��(x��) ��һ������Ї���������ˮƽ�� ���°��(qu��n)�w���\(y��n)�Ӽ��g(sh��)���У������D(zhu��n)�dՈע������Դ
���\(y��n)�Ӽ��g(sh��)��ע���\(y��n)�ӿ��Ƽ��g(sh��)�о���ͨ���\(y��n)�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g(sh��)��I(y��)�����\(y��n)�Ӽ��g(sh��)�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈԳ�������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\(y��n)�ӿ��ƻ��A(ch��)���g(sh��)���о����LJ���(n��i)�����I(l��ng)��l(f��)չ������I(y��)֮һ��Ҳ�LJ���(n��i)���С����������\(y��n)�ӿ��ƺ��ļ��g(sh��)�͌��r����ܛ��ƽ�_���g(sh��)����I(y��)����Ҫ�I(y��)��(w��)�У��\(y��n)�ӿ��ƿ�_�\(y��n)�ӿ�����_EtherCAT�\(y��n)�ӿ��ƿ�_EtherCAT������_�\(y��n)�ӿ���ϵ�y(t��ng)_ҕ�X������__�\(y��n)�ӿ���PLC_�\(y��n)�ӿ���_�C(j��)���˿�����_ҕ�X��λ�ȵȡ�
|

