š¬ę¬Ż║▒Š╬─ĮķĮB┴╦æ¬ė├SINUMERIK 840D slöĄ(sh©┤)┐žŽĄĮy(t©»ng)īŹ¼F(xi©żn)╬Õ▌S┬ō(li©ón)äė╚~Ų¼╝ė╣żųąą─ļŖÜŌ┐žųŲĄ─ĘĮ░ĖŻ¼ųž³cĻU╩÷┴╦▓╔╚ĪČÓ▓▀┬įĮM║ŽĄ─ĘĮ╩ĮŻ¼īóŅ^╬▓╝▄Ą─┐žųŲ▓▀┬įė╔å╬ę╗Ą─²łķT▌S┐žųŲĖ─×ķčbŖAĢrļSäė┐žųŲĪó┤ų╝ė╣żĢrų„Å─±Ņ║ŽĪóŠ½╝ė╣żĢrÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╚²ĘNĘĮ╩ĮŽÓĮY║ŽĄ─ą╬╩ĮŻ¼┐╦Ę■å╬ę╗▓▀┬į┤µį┌Ą─å¢Ņ}Ż¼ØMūŃ╚~Ų¼į┌čbŖAĪó┤ų╝ė╣żęį╝░Š½╝ė╣ż▀^│╠Ą─▓╗═¼ąĶŪ¾Ż¼ęįĖ─╔ŲÖC┤▓Ą─ąį─▄Ż¼╩╣Ųõ▓┘ū„Ė³▒ŃĮ▌ĪóĖ³ųŪ─▄Ż¼═¼Ģr╠ßĖ▀┴╦╚~Ų¼Ą─╝ė╣żą¦┬╩╝░ŪąŽ„┘|┴┐ĪŻ
ĻPµIį~Ż║SINUMERIK 840D sl ļSäė┐žųŲ ų„Å─±Ņ║Ž ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž ╚╦ÖCĮń├µ
ę╗ĪóĒŚ─┐║åĮķ
XKH ŽĄ┴ą╬Õ▌S┬ō(li©ón)äė╚~Ų¼╝ė╣żųąą─╩Ū▒▒Š®ÖCļŖį║ÖC┤▓ėąŽ▐╣½╦Šæ¬ė├ūįų„╝╝ągŻ¼ĮY║Ž╚~Ų¼┴Ń╝■╝ė╣ż╠ž³cŻ¼ūįų„įOėŗķ_░l(f©Ī)Ą─īŻśI(y©©)╚~Ų¼╝ė╣żÖC┤▓Ż¼ęč│╔╣”į┌ć°ā╚īŹ¼F(xi©żn)┼·┴┐æ¬ė├Ż¼ė├æ¶░³└©¢|ĘĮŲ¹▌åÖCÅSĪó¤oÕa╚~Ų¼ÅSĪó└Ķ├„░l(f©Ī)äėÖC╣½╦ŠĄ╚ų„ÖCÅSŻ¼ęį╝░×ķų„ÖCÅS▀Mąą┼õ╠ū╝ė╣żĄ─īŻśI(y©©)╚~Ų¼╝ė╣żÅSĪŻ
▒Š╬─ĮķĮBĄ─╬Õ▌S╚~Ų¼╝ė╣żųąą─Ż¼╩Ū▒Š╣½╦Šį┌ģó╝ė¤oÕa═ĖŲĮ╚~Ų¼ÅSĀ┐Ņ^│ąō·Ą─ć°╝ę┐Ų╝╝ųž┤¾īŻĒŚšnŅ}“ć°«aĖ▀ÖnöĄ(sh©┤)┐žÖC┤▓į┌╚~Ų¼╝ė╣żųąĄ─╩ŠĘČæ¬ė├”ųąŻ¼Ė∙ō■(j©┤)¤oÕa╚~Ų¼ÅSī”╚~Ų¼╝ė╣żÖC┤▓Ą─ę¬Ū¾Ż¼į┌įŁėą«aŲĘĄ─╗∙ĄA╔Ž▀MąąįOėŗķ_░l(f©Ī)Ą─Ż¼ÖC┤▓ą═╠¢×ķXKH800ZŻ¼ÖC┤▓═Ōė^╚ńłD1╦∙╩ŠĪŻ
XKH800Z╬Õ▌S┬ō(li©ón)äė╚~Ų¼╝ė╣żųąą─▓╔ė├┴óų∙ęŲäėĮYśŗŻ¼╬Õ▌S┬ō(li©ón)äėŻ¼╦∙ėąū°ś╦╚½ķ]Łh(hu©ón)┐žųŲŻ¼ÖC┤▓╣żū„┼_čžX▌SŠĆū¾ėę▀\äėŻ¼┴óų∙čžY▌SŪ░║¾ęŲäėŻ¼ų„▌SčžZ▌S╔ŽŽ┬ęŲäė▓óć·└@╗ž▐Dųąą─▀Mąąö[äėŻ©B▌SŻ®Ż¼Z▌S▓╔ė├ļpĮzĖ▄▀Mąą═¼▓Į“īäėŻ©Z1Ż¼Z2)Ż¼B▌Sė╔┴”ŠžļŖÖCų▒Įė“īäėŻ╗Ņ^╝▄Ż©A1▌SŻ®║═╬▓╝▄Ż©A2▌SŻ®░▓čbį┌╣żū„┼_╔ŽŻ¼Š∙▓╔ė├┴”ŠžļŖÖCų▒Įė“īäėĪó═¼▓Į╗ž▐DŻ¼═¼ĢrŻ¼╬▓╝▄į┌╣żū„┼_╔Ž═©▀^U▌S┐╔ęįĖ∙ō■(j©┤)┴Ń╝■│▀┤ńĄ─▓╗═¼▀Mąąš{š¹Ż¼ŪąŽ„ĢrŅ^╬▓╝▄ät═©▀^ę║ē║▀MąąµiŠoĪŻ

łD1Ż║XKH800Z═Ōė^łD
Č■ĪóöĄ(sh©┤)┐žŽĄĮy(t©»ng)┼õų├
XKH800Z╬Õ▌S┬ō(li©ón)äė╚~Ų¼╝ė╣żųąą─ėą5éĆų▒ŠĆ▌SŻ©XŻ¼YŻ¼Z1Ż¼Z2Ż¼UŻ®Ż¼3éĆą²▐D▌SŻ©A1Ż¼A2Ż¼BŻ®║═1éĆų„▌SŻ©SP1Ż®Ż¼╣▓9éĆ▌SąĶę¬┐žųŲĪŻÖC┤▓▀xė├ SINUMERIK 840D slöĄ(sh©┤)┐žŽĄĮy(t©»ng)Ż¼ė╔ė┌┐žųŲ▌SöĄ(sh©┤)▌^ČÓŻ¼įOėŗ═©▀^▀BĮėNX─ŻēKį÷ÅŖŽĄĮy(t©»ng)Ą─“īäė┐žųŲąį─▄Ż¼ę“┤╦Ż¼┐žųŲĘų×ķā╔▓┐ĘųŻ¼ę╗╩Ū═©▀^NCU720.3īŹ¼F(xi©żn)ī”Y▌SĪóU▌SĪóX▌SĪóB▌SĪóSP▌SĄ─┐žųŲŻ¼Č■╩Ū═©▀^NX15.3─ŻēKīŹ¼F(xi©żn)ī”Z1▌SĪóZ2▌SĪóA1▌SĪóA2▌SĄ─┐žųŲŻ¼┐žųŲ┐“╝▄łD╚ńłD2╦∙╩ŠĪŻ
1Īó┐žųŲå╬į¬NCU720.3
┐žųŲå╬į¬NCU720.3┐žųŲ5éĆ▌SŻ¼═©▀^DRIVE-CLiQĮė┐┌▀Mąą─ŻēKķgĪó─ŻēK┼cļŖÖCŠÄ┤aŲ„ķgĄ─═©ėŹĪŻę“×ķY▌SĪóU▌SĪóX▌S║═B▌S▀xė├Ą─╩Ū1FT7ŽĄ┴ąś╦£╩ļŖÖCŻ¼ļŖÖCūį╔ĒĦDRIVE-CLiQĮė┐┌Ż¼┐╔┼cļŖÖC─ŻēKų▒Įė▀BĮėŻ╗Č°ų„▌SļŖÖC▀xė├Ą┌╚²ĘĮļŖÖCŻ¼ŠÄ┤aŲ„ą┼╠¢ąĶę¬╝ė┼õSMC20─ŻēK▀Mąąą┼╠¢▐DōQ║¾┼cļŖÖC─ŻēK▀Mąą▀BĮėĪŻ
2Īó┐žųŲå╬į¬NX15
┐žųŲå╬į¬NX15┐žųŲ4éĆ▌SŻ¼ ŲõųąA1ĪóA2▌S▀xė├1FW6ŽĄ┴ą┴”ŠžļŖÖCŻ¼╩╣ė├║ŻĄ┬ØhRCN226ŠÄ┤aŲ„▀Mąą╬╗ų├Öz£yŻ¼╝ė┼õ═Ō▓┐ŠÄ┤aŲ„─ŻēKSME125īóŠÄ┤aŲ„ą┼╠¢║═ļŖÖC£žČ╚é„ĖąŲ„ą┼╠¢▐DōQ×ķDRIVE-CLiQą┼╠¢Ż¼Įė╚ļļŖÖC─ŻēKĪŻ
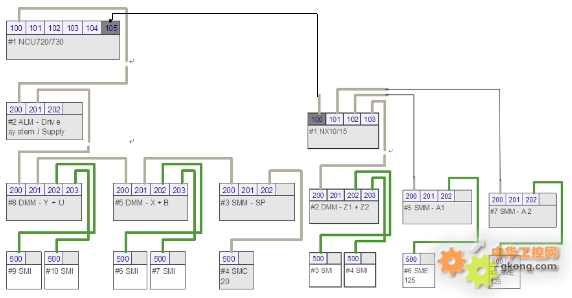
łD2Ż║▀BĮė═žōõĮYśŗłD
╚²ĪóŅ^╬▓╝▄▀\äė┐žųŲĄ─īŹ¼F(xi©żn)
1Īó═¼▓Į┐žųŲ
╚~Ų¼×ķ▒Ī▒┌ĮYśŗŻ¼▒Š╔Ēäéąį▌^╚§Ż¼┐╣ÅØäéČ╚║═┐╣┼żäéČ╚║▄▓ŅŻ¼╝ė╣żĢr╚~Ų¼Ņ^▓┐ė╔Ņ^╝▄ŖA│ųŻ¼╬▓▓┐ė╔╬▓╝▄ŖA│ųĪŻ╚ń╣¹┴Ń╝■Ą─ö[äėų╗ė╔Ņ^╝▄▀Mąą“īäėŻ¼į┌╝ė╣żĄĮ╚~Ų¼╬▓▓┐ĢrŻ¼ė╔ė┌┴Ń╝■äéČ╚▌^╚§Ż¼╝ė╣żš`▓Ņ▌^┤¾ĪŻ×ķ▒ŻūC╝ė╣żŠ½Č╚Ż¼įOėŗ▓╔ė├┴”ŠžļŖÖC“īäėŅ^╝▄Ż©A1▌SŻ®║═╬▓╝▄Ż©A2▌SŻ®▀Mąą═¼▓Į“īäėŻ¼ŲĄĮĖ─╔Ų╚~Ų¼į┌ŪąŽ„ĀŅæB(t©żi)Ž┬Ą─äéČ╚Ą─ū„ė├Ż¼═¼Ģr▓╔ė├Ė▀Š½Č╚ĮŪČ╚ŠÄ┤aŲ„▀Mąąķ]Łh(hu©ón)┐žųŲŻ¼ęį╠ßĖ▀▀\äėŠ½Č╚ĪŻ
«aŲĘūŅ│§įOėŗĢrŻ¼Ņ^╝▄Ż©A1▌SŻ®║═╬▓╝▄Ż©A2▌SŻ®▀xė├GANTRY▌SĄ─┐žųŲĘĮ╩ĮŻ¼ę¬Ū¾ā╔éĆ▌SĢr┐╠▒ŻūC╬╗ų├ę╗ų┬Ż¼└Ēšō╔ŽųvŻ¼▀@ĘN╬╗ų├═¼▓Į┐žųŲ╩ŪūŅŠ½┤_Ą─ę╗ĘN═¼▓ĮĘĮ╩ĮŻ¼Ą½╩Ūį┌īŹļH╝ė╣żĢr░l(f©Ī)¼F(xi©żn)┤µį┌ā╔éĆå¢Ņ}Ż¼Ą┌ę╗╩Ūį┌╣ż╝■čbŖAĢrŻ¼ė╔ė┌Ņ^╬▓╝▄ļŖÖC╩ŪGANTRY▌SĄ─┐žųŲĘĮ╩ĮŻ¼╬▓╝▄ļŖÖCį┌╬▓╝▄╗óŃQŖAŠoĄ─╦▓ķgŻ¼▓╗─▄ļSäėą²▐DŻ¼Ģ■įņ│╔╚~Ų¼┼żŪ·Ż¼ė░Ēæ║¾└m(x©┤)Ą─╝ė╣żŠ½Č╚Ż¼▓óŪę╬▓╝▄ļŖÖC┼żŠžĢ■╝ė┤¾Ż¼Š├Č°Š├ų«Ģ■ė░ĒæļŖÖCĄ─╩╣ė├ē█├³Ż╗Ą┌Č■éĆå¢Ņ}╩Ūį┌╚~Ų¼╝ė╣ż▀^│╠ųąŻ¼╚▌ęū«a╔·╗žÅŚŻ¼┤╦═ŌŻ¼╝ė╣żųą╚~Ų¼ā╚įŁėąÜłėÓæ¬┴”Ģ■ų▓ĮßīĘ┼Ż¼ę▓Ģ■ę²Ų╚~Ų¼╝ė╣żūāą╬Ż¼ė╔ė┌╬▓╝▄ļŖÖC▓╗─▄ļSäėą²▐DŻ¼ī¦ų┬Ņ^╬▓╝▄ļŖÖC┼żŠž▓╗ę╗ų┬Ż¼ė░Ēæ╚~Ų¼Ą─Š½╝ė╣żŠ½Č╚ĪŻ
ßśī”╔Ž╩÷å¢Ņ}Ż¼ĮY║ŽSIEMENS 840D SLŽĄĮy(t©»ng)Ą─Ųõ╦³ČÓ▌S±Ņ║Ž╣”─▄Ż¼Įø▀^Ę┤Å═ćLįć║═įć“ׯ¼øQČ©▓╔╚ĪČÓ▓▀┬įĮM║ŽĄ─ĘĮ╩ĮŻ¼īóŅ^╬▓╝▄Ą─┐žųŲ▓▀┬įė╔å╬ę╗Ą─GANTRY▌S═¼▓Į┐žųŲĖ─×ķčbŖAĢrĄ─ļSäė┐žųŲĪó┤ų╝ė╣żĢrĄ─ų„Å─±Ņ║ŽĪóŠ½╝ė╣żĢrĄ─ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╚²ĘNĘĮ╩ĮŽÓĮY║ŽĄ─ą╬╩ĮŻ¼┐╦Ę■å╬ę╗▓▀┬į┤µį┌Ą─å¢Ņ}Ż¼ØMūŃ╚~Ų¼į┌čbŖAĪó┤ų╝ė╣żęį╝░Š½╝ė╣ż▀^│╠Ą─▓╗═¼ąĶŪ¾Ż¼ęį╠ß╔²ÖC┤▓Ą─╝ė╣żą¦┬╩║═╝ė╣żŠ½Č╚ĪŻ
╚~Ų¼╝ė╣ż╩ŠęŌłD╚ńłD3╦∙╩ŠĪŻ

łD3Ż║╚~Ų¼╝ė╣ż╩ŠęŌłD
2ĪóļSäė┐žųŲŻ©follow-up modeŻ®
1Ż®ļSäė┐žųŲ║åĮķ
ę╗░Ń┐žųŲĀŅæB(t©żi)Ž┬Ż¼╦┼Ę■ļŖÖC╝ė╔Ž╩╣─▄║¾Ż¼ļŖÖC┐┐“īäėŲ„“īäėŻ¼«a╔·┼ż┴”Ż¼╩Ū¤oĘ©ė├═Ō┴”▐DäėĄ─Ż¼öĄ(sh©┤)┐žŽĄĮy(t©»ng)Öz£yļŖÖCĄ─╬╗ų├ęį╝░╦┘Č╚Ż¼╚ń╣¹│÷¼F(xi©żn)Ų½▓ŅŻ¼ŽĄĮy(t©»ng)Ģ■ł¾Š»╠ß╩ŠĪŻĄ½į┌ļSäė┐žųŲ─Ż╩ĮŽ┬Ż¼╦┼Ę■ļŖÖC╩Ū┐╔ęį═©▀^═Ō┴”▐DäėĄ─Ż¼▒╚╚ńŻ¼╚╦×ķĄ─ė├╩ų╚ź▐Däė╦┼Ę■ļŖÖCŻ¼ļŖÖC▐DäėŻ¼ļŖÖC£y┴┐ŽĄĮy(t©»ng)╚į╚╗╔·ą¦Ż¼╦³Ą─īŹļH╬╗ų├ųĄę▓▒╗ėøõøŽ┬üĒŻ¼═¼ĢrÅ─╬╗ų├«ŗ├µ┐╔ęį┐┤ĄĮŲõū°ś╦ųĄĄ─ūā╗»Ż¼ŽĄĮy(t©»ng)▓╗Ģ■ł¾Š»Ż¼▓óŪę«ö│ĘõNĖ·ļSĘĮ╩ĮĢrŻ¼ę▓▓╗ąĶę¬ī”Ė„éĆ▀MĮo▌Sųžą┬╗žģó┐╝³cĪŻ
2Ż®ļSäė┐žųŲĄ─īŹ¼F(xi©żn)
į┌╚~Ų¼čbŖA▀^│╠ųąŻ¼┐žųŲ▓▀┬į▓╔ė├ļSäė┐žųŲ─Ż╩ĮŻ¼╬▓╝▄ļŖÖCį┌╬▓╝▄╗óŃQŖAŠoĄ─╦▓ķgŻ¼┐╔ęįļSų°Ņ^╝▄ę╗Ųą²▐DŻ¼▓╗Ģ■įņ│╔╚~Ų¼┼żŪ·Ż╗╚~Ų¼čbŖA═Ļ│╔║¾Ż¼╚ĪŽ¹ļSäė┐žųŲ─Ż╩ĮŻ¼ķ_╩╝▀Mąą╝ė╣żĪŻ
╬▓╝▄ļSäėų„ę¬╩Ūį┌╚~Ų¼čbŖAĢr╩╣ė├Ż¼═©▀^PLC│╠ą“Ż¼┴ŅDB3*.DBX2.1 = “0”ĪóDB3*.DBX1.4 = “1”Ż¼╝┤┐╔īŹ¼F(xi©żn)ļSäė┐žųŲŻ╗Ę┤ų«Ż¼┴ŅDB3*.DBX2.1 = “1”ĪóDB3*.DBX1.4 = “0”Ż¼╝┤┐╔╚ĪŽ¹ļSäė┐žųŲĪŻ
3Īóų„Å─±Ņ║ŽŻ©master-slaveŻ®
1Ż®ų„Å─±Ņ║Ž╣”─▄║åĮķ
╩╣ė├ų„Å─±Ņ║ŽĘĮ╩ĮŻ¼ā╔ĮMļŖÖC“īäė═©▀^ÖCąĄ±Ņ║ŽĄĮ═¼ę╗Ė·▌S╔ŽŻ¼ų„äė▌S╝╚ėą╬╗ų├Łh(hu©ón)ę▓ėą╦┘Č╚Łh(hu©ón)┐žųŲŻ¼┐╔ęįīŹ¼F(xi©żn)Š½┤_Č©╬╗Ż╗Ą½╩ŪÅ─äė▌Sų╗ėą╦┘Č╚Łh(hu©ón)Ż¼Ė∙ō■(j©┤)ų„äė▌SĄ─╦┘Č╚ųĖ┴ŅīŹ¼F(xi©żn)╦┘Č╚Łh(hu©ón)Ą─┐žųŲŻ¼═©▀^š{š¹ų„Å─▌SĄ─╦┘Č╚▓Ņ═Ļ│╔ā╔“īäėķg┴”Šž▌ö│÷Ą─ŲĮ║ŌĪŻų„Å─±Ņ║ŽĘĮ╩Į╩Ū▀xĒŚ╣”─▄Ż¼ėåžø╠¢╩Ū6FC5800-0AM03-0YB0Ż¼ų„Å─┐žųŲįŁ└ĒłD╚ńŽ┬łD4╦∙╩ŠĪŻ
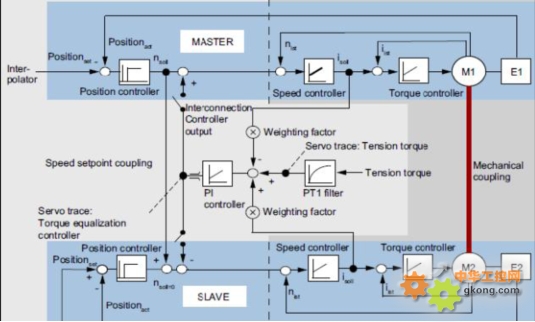
łD4Ż║ų„Å─±Ņ║Ž┐žųŲįŁ└ĒłD
į┌╚~Ų¼┤ų╝ė╣ż▀^│╠ųąŻ¼▀xė├ų„Å─±Ņ║ŽŻ¼▒M╣▄Å─äė▌Sø]ėą╬╗ų├Łh(hu©ón)┐žųŲŻ¼Ą½ė╔ė┌╩Ū┤ų╝ė╣żŻ¼ī”╝ė╣żŠ½Č╚ę¬Ū¾▓╗Ė▀Ż¼╦∙ęįė░Ēæ▓╗┤¾Ż╗ų„Å─±Ņ║ŽĘĮ╩Į═©▀^┴”Šžčaāö┐žųŲŲ„ī”Ņ^Īó╬▓╝▄ļŖÖCĄ─┴”Šž▀MąąĘų┼õŻ¼▒ŻūCŅ^Īó╬▓╝▄“īäėļŖÖC╠Äė┌ūŅ╝čĄ─┴”Šž±Ņ║ŽĀŅæB(t©żi)Ż¼┐╔ęį║▄║├Ą─ĮŌøQį┌┤ų╝ė╣ż▀^│╠ųąĄ─╚~Ų¼╝ė╣żūāą╬å¢Ņ}ĪŻ
2Ż®ų„Å─±Ņ║Ž┐žųŲĄ─īŹ¼F(xi©żn)
į┌╚~Ų¼┤ų╝ė╣ż▀^│╠ųąŻ¼┐žųŲ▓▀┬į▓╔ė├ų„Å─±Ņ║Ž─Ż╩ĮŻ¼▒M╣▄Å─äė▌Sø]ėą╬╗ų├Łh(hu©ón)┐žųŲŻ¼Ą½ė╔ė┌╩Ū┤ų╝ė╣żŻ¼ī”╝ė╣żŠ½Č╚ę¬Ū¾▓╗Ė▀Ż¼╦∙ęįė░Ēæ▓╗┤¾Ż╗ų„Å─±Ņ║ŽĘĮ╩Į═©▀^┴”Šžčaāö┐žųŲŲ„ī”Ņ^Īó╬▓╝▄ļŖÖCĄ─┴”Šž▀MąąĘų┼õŻ¼▒ŻūCŅ^Īó╬▓╝▄“īäėļŖÖC╠Äė┌ūŅ╝čĄ─┴”Šž±Ņ║ŽĀŅæB(t©żi)Ż¼┐╔ęį║▄║├Ą─ĮŌøQį┌┤ų╝ė╣ż▀^│╠ųąĄ─╚~Ų¼╝ė╣żūāą╬å¢Ņ}ĪŻ
▓╔ė├ų„Å─±Ņ║Ž─Ż╩ĮĢrŻ¼ų„ę¬ÖC┤▓ģóöĄ(sh©┤)įOų├╚ńŽ┬Ż║Ż©ūóŻ║ģóöĄ(sh©┤)ąĶę¬įOų├į┌Å─äė▌S╔ŽŻ®
MD37250 $MA_MS_ASSIGN_MASTER_SPEED_CMD = ”4”
╦┘Č╚±Ņ║ŽĄ─ų„äė▌SĄ─ÖC┤▓▌S╠¢Ż¼A1▌S×ķĄ┌4Ė∙▌SŻ╗
MD37252 $MA_MS_ASSIGN_MASTER_TORQUE_CTR = ”4”
┴”Šž±Ņ║ŽĄ─ų„äė▌SĄ─ÖC┤▓▌S╠¢Ż¼A1▌S×ķĄ┌4Ė∙▌SŻ╗
MD37253 $MA_MS_FUNCTION_MASK = ”1”
ų„Å─±Ņ║ŽįOų├Ż¼sl ╔Ž═Ų╦]įOų├1Ż¼MD37256ĪóMD37260╩╣ė├įOų├ųĄŻ╗
MD37254 $MA_MS_TORQUE_CTRL_MODE = ”1”
┴”Šžčaāö┐žųŲŲ„Ą─▌ö│÷ĘĮ╩ĮŻ¼0Ż║▌ö│÷ĄĮų„äė▌S║═Å─äė▌SŻ╗ 1Ż║▌ö│÷ĄĮÅ─äė▌SŻ╗
ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪ2Ż║▌ö│÷ĄĮų„äė▌SŻ╗ ĪĪĪĪĪĪĪĪ3Ż║¤o▌ö│÷Ż╗
MD37255 $ MS_TORQUE_CTRL_ACTIVATION = ”1”
┴”Šžčaāö┐žųŲŲ„Ą─╝ż╗ŅĘĮ╩ĮŻ¼0Ż║═©▀^MD37254Ż╗1Ż║═©▀^ą┼╠¢DB3*.DBX24.4Ż╗
MD37256 $ MA_MS_TORQUE_CTRL_P_GAIN = ”50”
┴”Šžčaāö┐žųŲŲ„Ą─Pį÷굯¼ĘČć·Ż║0~100Ż¼
įOų├ųĄ×ķMD32000Ż©▌SūŅ┤¾╦┘Č╚Ż® / P2003Ż©Å─äė▌SŅ~Č©┼żŠžŻ®Ą─░┘ĘųöĄ(sh©┤)Ż╗
MD37258 $ MA_MS_TORQUE_CTRL_I_TIME = ”0.1”
┴”Šžčaāö┐žųŲŲ„Ą─ĘeĘųĢrķgŻ¼į÷ęµ>0ĢrŻ¼ĘeĘųĢrķgėąą¦Ż╗
MD37260 $ MA_MS_MAX_CTRL_VELO= ”100”
┴”Šžčaāö┐žųŲŲ„Ą─ūŅ┤¾╦┘Č╚Ż¼MD32000Ą─░┘Ęų▒╚Ż¼ĘČć·Ż║0~100Ż╗
MD37262 $ MA_MS_COUPLING_ALWAYS_ACTIVE = ”0”
ų„Å─±Ņ║ŽĄ─╝ż╗ŅĘĮ╩ĮŻ¼0Ż║┼RĢr±Ņ║ŽŻ¼═©▀^NCųĖ┴ŅMASLON╗“Įė┐┌ą┼╠¢DB3*.DBX24.7;
ĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪĪ1Ż║ė└Š├±Ņ║ŽŻ¼NC╗“PLC┐žųŲ¤oą¦ĪŻ
MD37264 $ MA_MS_TENSION_TORQUE = ” 0”
ų„Å─▌SķgĄ─Åł┴”Ż¼Åł┴”×ķģó┐╝┴”ŠžĄ─░┘Ęų▒╚Ż¼š²žōųĄš{š¹├øŠoĘĮŽ“Ż¼ĘČć·Ż║-100~100Ż╗
MD37266 $ MA_MS_TENSION_TORO _FILTER_TIME = ” 0”
Åł┴”š{š¹Ą─×V▓©Ų„Ģrķg│ŻöĄ(sh©┤)Ż¼ųĄ>0Ż¼Åł┴”š{š¹×V▓©Ų„ėąą¦Ż¼ĘČć·Ż║0~100Ż¼å╬╬╗Ż║├ļŻ╗
MD37268 $ MA_MS_ TORQUE_WEIGHT_SLAVE = ”50”
Å─▌S┴”Šžš╝┐é┴”ŠžĄ─░┘Ęų▒╚Ż¼╚¶ų„ĪóÅ─ļŖÖCę╗śėŻ¼įO×ķ50Ż¼ĘČć·Ż║0~100Ż╗
MD37270 $ MA_MS_ VELO_TOL_COARSE = ”5”
ų„Å─╦┘Č╚▓ŅĄ─┤ųČ©╬╗┤░┐┌Ż¼┤░┐┌įOų├ųĄ×ķMD32000Ą─░┘Ęų▒╚Ż¼ĘČć·Ż║0~100Ż╗
MD37272 $ MA_MS_ TORQUE_ VELO_TOL_FINE = ”1”
ų„Å─╦┘Č╚▓ŅĄ─Š½Č©╬╗┤░┐┌Ż¼┤░┐┌įOų├ųĄ×ķMD32000Ą─░┘Ęų▒╚Ż¼ĘČć·Ż║0~100Ż╗
MD37274 $ MA_MS_ MOTION_ DIR_REVERSE = ”0”
Ę┤Ž“Å─äė▌SĄ─ęŲäėĘĮŽ“Ż¼0Ż║Å─▌S±Ņ║ŽĘĮŽ“▓╗ūāŻ╗1Ż║Å─▌S±Ņ║ŽĘĮŽ“╚ĪĘ┤ĪŻ
4ĪóÖC┤▓ū°ś╦ŽĄ±Ņ║ŽŻ©machine coordinate system couplingŻ®
1Ż®ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž║åĮķ
į┌ÖC┤▓ųąŻ¼╚ń╣¹ėąā╔éĆ╗“ā╔éĆęį╔ŽŽÓī”¬Ü┴óĄ─ÖC┤▓Ņ^ąĶę¬═Ļ│╔ŽÓ═¼Ą─äėū„Ż¼Ą½╩Ūģs▓╗─▄═©▀^ś╦£╩Ą─±Ņ║Ž╣”─▄īŹ¼F(xi©żn)ĢrŻ¼┐╔ęį╩╣ė├ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╣”─▄īŹ¼F(xi©żn)═¼▓ĮĄ─äėū„Ż¼╝┤Į©┴óĖ„ūį¬Ü┴óĄ─ū°ś╦ŽĄŻ¼Ė„ūįū°ś╦ŽĄŽ┬Ą─ÄūéĆ▌Sį┌▀\äėĢr═©▀^╬╗ų├Öz£y║═čaāö?sh©┤)╚╣”─▄īŹ¼F(xi©żn)ū°ś╦▌Sų«ķgĄ─╬╗ų├═¼▓ĮĪŻį┌ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž┐žųŲŽ┬Ą─▌SŻ¼Š▀ėą╬╗ęŲ║═╦┘Č╚═¼▓Į╣”─▄Ż¼ęį═¼śėĄ─╦┘Č╚▀Mąą▀\äėŻ¼╦┘Č╚ĘĮŽ“┐╔ęįŽÓ═¼Ż¼ę▓┐╔ęįŽÓĘ┤ Ż¼▓ó┐╔īóā╔éĆ▌SĄ─╬╗ų├š`▓Ņ┐žųŲį┌įOČ©Ą─ĘČć·ā╚ĪŻ
ÖC┤▓ū°ś╦ŽĄ±Ņ║ŽŽ┬Ą─ų„äė▌S┐╔ęįėą1éĆ╗“š▀ČÓéĆÅ─äė▌SŻ¼Ą½╩ŪÅ─äė▌S┼cų„äė▌Sų«ķg▓╗─▄╗źōQŻ╗ī”ė┌Å─äė▌SČ°čįŻ¼▓╗─▄╩ŪPLC▌SŻ¼ę▓▓╗─▄ū„×ķ┐žųŲ▌SŻ¼▓óŪęį┌JOG─Ż╩ĮŽ┬Ż¼Å─äė▌S▓╗─▄å╬¬Üäėū„ĪŻ┤╦═ŌŻ¼æ¬ė├ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╣”─▄Ż¼ę¬Ū¾ų„äė▌S║═Å─äė▌S▒žĒÜ═¼╩Ūą²▐D▌S╗“═¼╩Ūų▒ŠĆ▌SŻ¼Ūęų„äė▌S║═Å─äė▌S▓╗─▄╩Ū▐DōQ▌SŻ¼ų„▌S▓╗─▄╩╣ė├ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╣”─▄ĪŻ
ąĶę¬╠žäeūóęŌĄ─╩ŪŻ¼ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╣”─▄Ą─╝ż╗Ņ║═ĻPķ]Ż¼╩Ū▓╗┐╔ęį═©▀^PLCĮė┐┌ą┼╠¢┐žųŲĄ─Ż¼ų╗─▄═©▀^NCųĖ┴ŅCC_COPON║═CC_COPOFF┤“ķ_╗“ĻPķ]ĪŻ╝ż╗ŅÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╣”─▄║¾Ż¼į┌▌Sį\öÓ«ŗ├µŽ┬┐╔ęį┐┤ĄĮŻ¼Å─äė▌SĄ─┐žųŲĀŅæB(t©żi)ė╔╦┘Č╚┐žųŲĖ─×ķ╬╗ų├┐žųŲĪŻ
ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╩Ū▀xĒŚ╣”─▄Ż¼ėåžø╠¢×ķ6FC5800-0AM72-0YB0Ż¼▀@éĆę╗éĆ▀xĒŚ░³Ż¼╝ż╗Ņ╩┌ÖÓĢrąĶę¬═¼Ģr▀xųą▀@éĆėåžø╠¢Ż¼ęį╝░6FC5800-0AM23-0YB0Ż¼╣”─▄▓┼┐╔ęį╔·ą¦ĪŻ
į┌Ž┬łD5ųąŻ¼ÖC┤▓Ņ^1║═ÖC┤▓Ņ^2Ęųäeė╔5éĆū°ś╦▌S“īäėŻ¼Ųõį┌ÖCąĄ╔ŽķgĮėŽÓ▀BŻ¼ōĒėąĖ„ūį¬Ü┴óĄ─ū°ś╦ŽĄŻ¼ā╔éĆū°ś╦ŽĄŽ┬Ą─ Y║═Y2ĪóZ║═Z2ĪóW║═W2ĪóA║═A2ęį╝░C║═C2Ż¼▀@5ī”ū°ś╦▌SŠ∙┐╔═©▀^ÖC┤▓ū°ś╦ŽĄīŹ¼F(xi©żn)±Ņ║Ž┐žųŲĪŻ
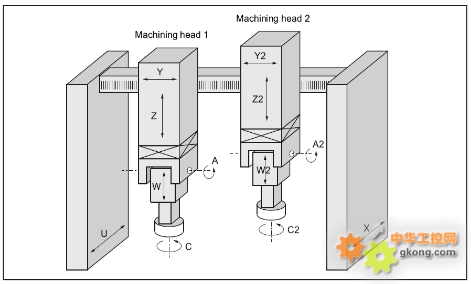
łD5Ż║ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╩ŠęŌłD
2Ż®ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╣”─▄Ą─īŹ¼F(xi©żn)
╚~Ų¼Š½╝ė╣żĢrŻ¼ī”Ņ^Īó╬▓╝▄ļŖÖCĄ─Č©╬╗Š½Č╚ėąų°ć└Ė±ę¬Ū¾Ż¼ę“┤╦▓╔ė├ÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╣”─▄Ż¼Ą½įō╣”─▄╩Ū▓╗┐╔ęį═©▀^PLCĮė┐┌ą┼╠¢┐žųŲĄ─Ż¼ų╗─▄═©▀^NCųĖ┴ŅCC_COPON║═CC_COPOFF┤“ķ_╗“ĻPķ]Ż¼╚ń╣¹├┐┤╬Č╝į┌│╠ą“ųą▌ö╚ļ▀@ÄūéĆųĖ┴Ņ▒╚▌^┬ķ¤®Ż¼ę“┤╦╩╣ė├M┤·┤aš{ė├ĪŻ┤╦═ŌŻ¼│÷ė┌░▓╚½Ą─┐╝æ]Ż¼│²┴╦į┌╚~Ų¼čbŖAĄ─▀^│╠ųąŻ¼╬▓╝▄┐╔ęįļSäėŻ¼ŲõėÓĀŅæB(t©żi)Ž┬Ż¼Ņ^Īó╬▓╝▄Č╝╩Ūį┌═¼▓ĮĀŅæB(t©żi)Ż¼ę“┤╦į┌ė├M┤·┤a┤“ķ_╗“╩ŪĻPķ]ÖC┤▓ū°ś╦ŽĄ±Ņ║ŽĄ─═¼ĢrŻ¼æ¬įōŽÓæ¬Ą─ĻPķ]╗“╩Ū┤“ķ_ų„Å─±Ņ║Ž╣”─▄ĪŻ
═©ė├ģóöĄ(sh©┤)įOų├╚ńŽ┬Ż║
MD10715 [5] $ MN_M_NO_FCT_CYCLE = ”65”
MD10715 [6] $ MN_M_NO_FCT_CYCLE = ”66”
MD10716 [5] $ MN_M_NO_FCT_CYCLE_NAME = ” L65_MCSON”
MD10716 [6] $ MN_M_NO_FCT_CYCLE_NAME = ” L66_MCSOFF”
į┘īóęįŽ┬ā╔éĆ│╠ą“┐Į╚ļųŲįņ╔╠裣h(hu©ón)─┐õøŽ┬╝┤┐╔ĪŻ
L65_MCSON.SPFŻ╗
MASLOF(AA)
CC_COPON(A,AA)
M17
L66_MCSOFF.SPFŻ╗
CC_COPOFF(A,AA)
MASLON(AA)
M17
▌SģóöĄ(sh©┤)įOų├Ż©ūóŻ║ģóöĄ(sh©┤)ąĶę¬įOų├į┌Å─äė▌S╔ŽŻ®
MD28090 $ MM_NUM_CC_BLOCK_ELEMENTS = ”1”
ė├ė┌ŠÄūg裣h(hu©ón)Ą─│╠ą“Č╬į¬╦žĄ─öĄ(sh©┤)┴┐Ż©DRAMŻ®Ż╗
MD28100 $ MM_NUM_CC_BLOCK_USER_MEM = ”100”
ė├ė┌ŠÄūg裣h(hu©ón)Ą─│╠ą“Č╬┤µā”Ų„╚▌┴┐Ż©DRAMŻ®Ż¼å╬╬╗KBŻ╗
MD60946 $MN_CC_ACTIVE_IN_CHAN_MCSC = ”1”
═©ė├ģóöĄ(sh©┤)Ż¼▀xĒŚ╣”─▄╝ż╗ŅŻ¼įOų├×ķ1║¾ąĶę¬POÅ═╬╗Ż¼Å═╬╗║¾į┌▌SģóöĄ(sh©┤)ųąŻ¼▓┼┐╔ęį╦č╦„ĄĮęįŽ┬Ą─ģóöĄ(sh©┤)Ż╗
MD63540 $ MA_CC_MASTER_AXIS = ”4”
ÖC┤▓ū°ś╦ŽĄ±Ņ║ŽĄ─ų„äė▌SĄ─ÖC┤▓▌S╠¢Ż¼A1▌S×ķĄ┌4Ė∙▌SŻ╗
MD63541 $ MA_CC_POSITION_TOL = ”0.5”
Å─äė▌SĄ─▒O(ji©Īn)┐ž┤░┐┌Ż¼┤╦┤░┐┌Öz£yĄ─╩ŪĮ^ī”╬╗ų├Ż╗
MD63542 $ MA_CC_PROTEC_MASTER = ”0”
┼÷ū▓Ę└ūoī”æ¬Ą─ų„äė▌SŻ¼Ņ^Īó╬▓╝▄▓╗Ģ■░l(f©Ī)╔·┼÷ū▓Ż¼╣╩▓╗ąĶę¬╩╣ė├┼÷ū▓▒Żūo╣”─▄Ż╗
MD63543 $ MA_ CC_PROTEC_OPTIONS = ”0”
┼÷ū▓Ę└ūo╣”─▄Ą─┼õų├Ż╗
MD63544 $ MA_ CC_COLLISION_WIN = ”-1”
┼÷ū▓Ę└ūo┤░┐┌Ż╗
MD63545 $ MA_ CC_OFFSET_MASTER = ”0”
ė├ė┌┼÷ū▓Ę└ūoĄ─┴Ń³cŲ½ų├ĪŻ
5Īó┐žųŲĘĮ╩ĮĄ─ŪąōQ
ŠC╔Ž╦∙╩÷Ż¼Ņ^╬▓╝▄Ą─┐žųŲ▓▀┬į═¼Ģr╩╣ė├┴╦ļSäėĪóų„Å─║═ū°ś╦ŽĄ±Ņ║Ž╚²ĘN┐žųŲĘĮ╩ĮŻ¼┐╝æ]ĄĮÖC┤▓▓┘ū„Ą─░▓╚½ąį║═▒Ń└¹ąįŻ¼æ¬ė├Easy Screen╣”─▄įOėŗė├æ¶Įń├µŻ¼▓┘ū„š▀═©▀^³cō¶Įń├µųąĄ─┤╣ų▒░┤µIŻ¼╝┤┐╔╝ż╗Ņī”æ¬Ą─┐žųŲĘĮ╩ĮĪŻ
SINUMERIK 840D slöĄ(sh©┤)┐žŽĄĮy(t©»ng)Ą─ė▓▒P┬ĘÅĮF:\HMI\hmisl\oem\sinumerik\hmi\Ž┬ėąā╔éĆ╬─╝■ŖAŻ¼╬─╝■ŖAcfgųą┤µĘ┼Ą─╩ŪĮń├µ┐žųŲĄ─╝▄śŗ╬─╝■Ż¼╬─╝■ŖAprojųą┤µĘ┼ųŲįņ╔╠Č■┤╬ķ_░l(f©Ī)ė├Ą─Įń├µ╬─╝■ĪŻ
1Ż®ą▐Ė─┼õų├╬─╝■easyscreen.iniŻ¼ųĖČ©╬▓╝▄ūįäė┐žųŲĮń├µĄ─┤µĘ┼╬╗ų├Ż¼į┌ŽĄĮy(t©»ng)Ą─į\öÓ«ŗ├µŽ┬Ż║[STARTFILES]
StartFile07 = area := AreaDiagnosis, dialog:=SlDgDialog, startfile := diag.comŻ╗
2Ż®ŠÄųŲŅ^╬▓╝▄┐žųŲĘĮ╩ĮŪąōQĄ─Įń├µ│╠ą“Ż¼┤µĘ┼į┌╬─╝■ŖAprogŽ┬Ż¼╬─╝■├¹×ķdiag.comŻ¼ę“×ķÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╩Ū▒žĒÜė├ųĖ┴Ņ╝ż╗ŅĄ─Ż¼╦∙ęįū÷Įń├µĢr╩╣ė├┴╦╬─╝■╣”─▄“▀xō±│╠ą“SP”šZŠõŻ¼└²╚ńŻ¼ÖC┤▓ū°ś╦ŽĄ±Ņ║ŽĘĮ╩Į╝ż╗ŅŻ¼ī”欚ZŠõSP("//NC/CMA.DIR/ L65_MCSON.SPF ")Ż╗
3Ż®│╠ą“é„╚ļ┬ĘÅĮF:\HMI\hmisl\oem\sinumerik\hmi\proj\Ż¼ŽĄĮy(t©»ng)ųžåó║¾Ż¼į┌ŽĄĮy(t©»ng)Ą─į\öÓ«ŗ├µŽ┬Ģ■│÷¼F(xi©żn)▄øµI“Ņ^╬▓╝▄┐žųŲ”Ż¼³cō¶įōµIŻ¼╝┤┐╔▀M╚ļŅ^╬▓╝▄┐žųŲĘĮ╩ĮŪąōQĮń├µŻ¼į┌Įń├µųą³cō¶ī”æ¬Ą─┤╣ų▒░┤µIŻ¼į┘░┤Ž┬裣h(hu©ón)åóäėµIŻ¼╝┤┐╔ęį╝ż╗Ņī”æ¬Ą─ĘĮ╩ĮŻ¼═¼ĢrŻ¼Ņ^╬▓╝▄Ą─┐žųŲĀŅæB(t©żi)ę▓┐╔ęįį┌Įń├µųąūx│÷Ż¼ęįĘĮ▒Ń▓┘ū„š▀īŹĢr▒O(ji©Īn)┐žĪŻŅ^╬▓╝▄┐žųŲĮń├µ╚ńłD6╦∙╩ŠĪŻ
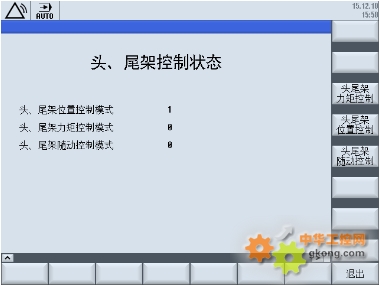
łD6Ż║Ņ^Īó╬▓╝▄┐žųŲĀŅæB(t©żi)Įń├µ
╦─Īó╝ė╣ż“×ūC
įOėŗķ_░l(f©Ī)═Ļ│╔║¾Ż¼ŪČ╚ļČÓ▓▀┬į┐žųŲ─Ż╩ĮĄ─┴∙┼_XKH800ZÖC┤▓į┌▒Š╣½╦ŠĮø▀^┴╦╚~Ų¼┴Ń╝■Ą─ąĪ┼·┴┐▀B└m(x©┤)╝ė╣żįć“ׯ¼įć“×╚~Ų¼├½┼„×ķĘĮõōŻ¼│▀┤ń×ķ300×75×45mmŻ¼▓─┴Ž×ķ▓╗õPõōĪŻį┌╚~Ų¼ąĪ┼·┴┐▀B└m(x©┤)╝ė╣żįć“×▀^│╠ųąŻ¼ČÓĘN±Ņ║ŽĘĮ╩ĮŽÓĮY║ŽĄ─Ņ^╬▓╝▄┐žųŲ─Ż╩ĮŻ¼▓┘ū„ĘĮ▒Ńėąą¦Ż¼╣żū„ĘĆ(w©¦n)Č©┐╔┐┐Ż¼╝ė╣ż│÷Ą─╚~Ų¼Š½Č╚║═▒Ē├µ┤ų▓┌Č╚Öz£y║ŽĖ±Ż¼═©▀^┴╦ė├æ¶Ą─“×╩šĪŻ
ÖC┤▓░l(f©Ī)▀\ų┴¤oÕa═ĖŲĮ╚~Ų¼ÅS║¾Ż¼ė├æ¶╩╣ė├įōÖC┤▓▀Mąą┴╦ČÓĘNą═╠¢Ą─▓╗õPõōĘĮõō╚~Ų¼Ż©├½┼„ķLČ╚200Ī½580mmŻ®║═─ŻÕæ╚~Ų¼Ż©├½┼„ķLČ╚350Ī½550mmŻ®Ą─┤¾┼·┴┐╔·«aŻ¼│¼▀^░ļ─ĻĄ─ŪąŽ„╝ė╣ż▒Ē├„Ż¼ÖC┤▓╣żū„ĘĆ(w©¦n)Č©┐╔┐┐Ż¼Ņ^╬▓╝▄▀\äė┐žųŲīŹė├ėąą¦Ż¼Ą├ĄĮė├æ¶║├įuŻ¼×ķ╚~Ų¼╝ė╣żŠ½Č╚║═╝ė╣żą¦┬╩Ą─╠ßĖ▀░l(f©Ī)ō]┴╦ųžę¬ū„ė├ĪŻ
╬ÕĪóæ¬ė├¾wĢ■
═©▀^ī”SINUMERIK 840D SLöĄ(sh©┤)┐žŽĄĮy(t©»ng)ų„Å─±Ņ║ŽĪóļSäė┐žųŲĪóÖC┤▓ū°ś╦ŽĄ±Ņ║Ž╚²éĆ╣”─▄Ą─ŠC║Žæ¬ė├Ż¼ą╬│╔┴╦┐╔┐┐ėąą¦Ą─ŪČ╚ļ╩Į┐žųŲ▓▀┬įŻ¼īŹ¼F(xi©żn)┴╦╬Õ▌S╚~Ų¼╝ė╣żųąą─Ą─Ņ^╬▓╝▄═¼▓Į┐žųŲŻ¼ĮŌøQ┴╦į┌╚~Ų¼čbŖAĪó┤ų╝ė╣ż║═Š½╝ė╣ż▀^│╠ųąŻ¼Ņ^╬▓╝▄┐žųŲ╔Ž▓╗═¼ąĶŪ¾Ą─å¢Ņ}Ż¼╠ßĖ▀┴╦╝ė╣żą¦┬╩Ż¼ØMūŃ┴╦╚~Ų¼╝ė╣żĄ─╣ż╦ćę¬Ū¾Ż¼ę▓│õĘų¾w¼F(xi©żn)┴╦SINUMERIK 840D SLöĄ(sh©┤)┐žŽĄĮy(t©»ng)ÅŖ┤¾Ą─╣”─▄╝░Ųõ┴╝║├Ą─ķ_Ę┼ąįĪŻ
┴∙Īóģó┐╝╬─½I
[1] «ģ│ąČ„ ČĪ─╦Į© ¼F(xi©żn)┤·öĄ(sh©┤)┐žÖC┤▓ ▒▒Š®ÖCąĄ╣żśI(y©©)│÷░µ╔ń 1991
[2] SINUMERIK 840D SLŠSą▐┼cš{š¹ ╬„ķTūė(ųąć°)ėąŽ▐╣½╦Š 2013
[3] ĘČ▓«īÄĄ╚ PLC┐╔ŠÄ│╠ą“┐žųŲŲ„Į╠│╠ ▒▒Š®║Żč¾│÷░µ╔ń 1993
[4] DOConCD SINUMERIK 03_2013 ╬„ķTūė(ųąć°)ėąŽ▐╣½╦Š 2013
[5] SINUMERIK 840D sl Easy Screen (BE2) 2011

