|
����ARM9����|���O�y�x�Ĕ����ɼ�
�S �� ����S�� ���S ��
�������˱��C���ϵ�y��ȫ���ɿ�����Ч���\�У����|������ܹ��o��һ���Ҫ�Ĺ�������ˣ����ñ�yʽ����|���O�y�x��늾W����|�������M�Мʴ_�y����ARM9�����l�ߡ��ٶȿ졢�ȴ����הUչ�������\��Ƕ��ʽLinux����ϵ�y���鑪�ó�����OӋ�ṩ�˷���ėl�������_�l�����õ�̎������ARM9һS3C2410������ARM9һS3C2410������|���O�y�x�����w�Y����D����D1��ʾ��
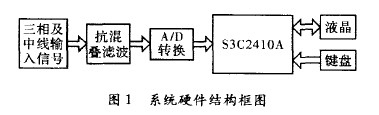
�����ɈD1��֪��ԓϵ�y��Ӳ�������ѽ��U���˴惦����ARM9һ$3C2410A���İ��⣬߀���������̖�{�����I�P���@ʾ���·����MAX1324�M�ɵ�A��D����̖�{���·����ԓ�����ɼ�����Ҫ���ݣ�������Ҫ��B�@һ���ֵ�Ӳ�������Pܛ���OӋ��
1 �����ɼ���Ӳ���OӋ
�����_�l��ST2410��Ӳ���YԴ�S�����ṩ��40�_�ⲿ�Uչ�ӿڣ�ͨ�^ԓ�ӿڣ����Է���ؔUչ��̖�ɼ�������·����̖�{�������·�ľ��w�Y������D2��ʾ��
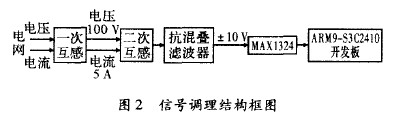
1��1 ��̖�{���·
����ģ�M��̖ݔ��ǰ���·��������늉�������(PT)�����������(CT)�������ɘ�늉�������M�и��x���ƽ�D�Q��һ�λ����Ȍ����늾W�ĸ߉���������D�Q�ɘ˜ʵĽ���100 V��5 A�����λ������ٌ����D�Q��A��DоƬMAX1324ݔ����Ҫ���һ10��+lO V�ƽ���Ķ��õ����ϵ�y�����B���c��ȫ��ԭʼ������
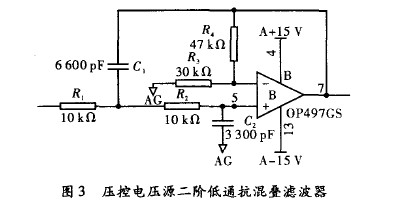
��������B�V���������ã��nj�ݔ����̖�еĸ��l�����V�����Է�ֹ���y��̖�ĸ��l�ɔ_�c���õĵ��l��̖�l����B��Ӱ표y�����ȡ�����B�V�����É���늉�Դ���A��ͨ�V��������D3��ʾ�����]�����b����Ҫ�O�y1��50���C����Ҫ����50��50��50 Hz�l�ʷ����ȵķ��l��������Խƽ̹Խ�á�
1��2 AD�D�Q
��������ڜy��늾W�����ƽ�Ⅲ���r��Ҫ�õ����Ծ���늉���������mȻ����Փ�ϣ�����ͨ�^��늉��������������Ծ���늉������ֵ�����ǣ��y��ֵ��ԓ���ӽӽ������F�������ԣ����ͬ�r�y��늾W���Ñ������B���c������늉���������������Ծ���늉��c�������Ӌ8·ģ����̖����·��̖��ͬ���ɘӿ�����Ч�˷���ͨ���D�Q���a�������}������A��D��ԓ�x��8·ͬ���ɘ�оƬ�����Ź�˾��MAX1320��MAX1324�����m�������OӋҪ��Č���оƬ��MAX1324��ģ��늉��������10 V�� ��MAX1320оƬ��ݔ��늉�����������ͬ�Ӹɔ_�����l���£�A��D�D�Q���������ȕ���һЩ�����Բ���MAX1324�����Ȳ�������8�������IJɘӱ�������8ͨ���Ķ�·�_�P�������F8·ģ�M����˲�r�ɼ������D�Q�Y�����a�a����ʽ�����ݔ����
��������һ���ѽ��o���D�Qλ����ADC��������̖�����xɢ����λ���ƽֵ�Ǵ_֪�ģ�l4λMAX125�ṩ2M�����xɢ�ƽ��2 X 10 V��2�� 1��22 mV�������ֱ��ʿ��_��0��025�� ���ڇ����C���y���˜��У�����Ҏ���Ļ�׃�ʣ�����Ĝy������Ҫ��������һЩ�����]�����N��r�����`���C������14λ��ADC����ȫ���ԝM���C���y�����OӋҪ��ġ�
��������|���O�y�x��ARM̎����оƬ$3C2410A�Ȳ�߀����8ͨ��l0λ��A��DC����������������֪��10λA��D�y�ԝM���C���O�y�x�������ɼ���Ҫ����ԓA��DCҲ���߂�ͬ���ɘӹ��ܡ�Ȼ���ڜy��늾W�������l�ʕr�����Ҙ˜�Ҫ���l�Ĝy��������50��0��01 Hz���@��ζ����һ�����ڃȣ�Ҫ�ɼ�50��0��01=5 000���c���ϣ�����A��D�D�Q�r�g��20 ms��5 000=4 s���¡��l�ʜy������ֵ�ľ���Ҫ���ߣ�ֻҪ�܉������Д���ֵؓ���ɡ�ARMоƬ��10λA��D���D�Q�ٶ���߿��_500 ksps(2 p,s)�����ԣ����Ԝy��늾W�Ļ����l�������m J���@�ӣ�MAX1324��ARM�ȵ�A��DC�քe�����C�����l�ʜy�����M�����ˡ�
1��3 M 324�c̎����S3C2410��Ӳ���ӿ�
����MAX1324�c̎����$3C2410�Ľӿ���D4��ʾ��MAX1324��ģ�M���늉���5 V����MAX1324���S�Ĕ��ֹ��늉�������2��7��5��25 V���D����3��3 V���@�ӣ����Բ����ƽ�D�Q��ֱ���c$3C2410�Ĕ���I����O�ӿ����B��
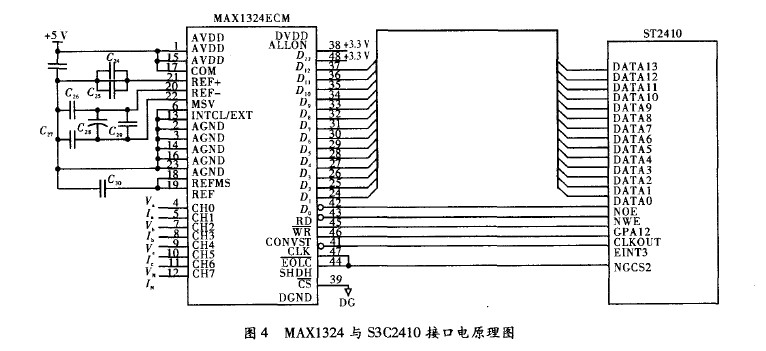
���M�Д����ɼ��r�������^�̷֞�����3����
(1)����Ҫ��MAX1324�Ĺ�����ʽ�O�Þ�8��ͨ����˲�r�ɘӣ����_ALLON�Ӹ��ƽ������cS��WR�r������ ��D ����ȫ��1�����@��8��ͨ�����ܶ����x�У� ���Fͬ��ADC��
(2)����ARM ��GPA12���ӣ�ʹCONVST���_����ƽ��ݔ����̖�ڲɘӱ������_���������ƽ������CONVST���������_ʼ����A��D���@��Ķ�ͨ���D�Q�ǰ�ͨ��̖���͵��ߵ�����M�У������һ��ͨ�����D�Q�Y��������ͨ���D�Q�Y����̖EOLC��׃����ƽ���D�Q�Y���ȃ�����Ƭ�Ȍ�����14λ��8��SRAM�У�
(3)�xȡģ���D�Q�Y���������䷽ʽ�ЃɷN��һ�N�Dz�ԃ��ʽ��MAX1324��EOLC���_�ӵ�$3C2410��һ��I��0���_�ϣ�$3C2410����A��D�D�Q����ز�ԃ�@��I��0���_�Ƿ����ƽ�����Д��D�Q�Ƿ�Y����Ȼ���������xȡ�D�Q��Ĕ�����̖����һ�N���Дʽ��MAX1324��EOLC���_ֱ�ӽӵ�$3C2410��һ���ⲿ�Д����_�ϣ�һ���D�Q�Y�����t��$3C2410��Ո�Д࣬S3C2410�͕��M���Д���ճ��������xȡMAX1324�D�Q��Ĕ������������CPU��ʹ��Ч�ʣ������Дʽ�� �D4��MAX1324��EOLC���_�ӵ�$3C2410���ⲿ�Д�EINT3�����_�ϡ���A��D�����D�Q�Y����EOLC�͕���$3C2410��EINT3�l�����ƽ�� ��EINT3���_����ƽ�r���͕��Ⱥ���MAX1324��RD���_�l��8���x�}�_�������xͨCS���_�֕r�xȡMAXI324�D�Q���8��ͨ��ADC������
2 �ӿ���
�����O���ӳ�����΄հ����Ԅ����úͳ�ʼ���ӳ���ؓ؟�z�y��Ҫ�ӵ�Ӳ���O���Ƿ����������������ԓ�O���������t���@���O�估�����P���O���ӳ�����Ҫ��ܛ����B�M�г�ʼ����
����Linux�µ��O���ӳ��M����һ�M��ȫ��ͬ�΄յĺ����ļ��ϡ�����A��D�ӣ���Ҫ��Ɍ�A��D�������ƼĴ����͔����Ĵ�����open0��close0��read0��write0�ȵIJ����� ����file��operations��ע�� ��
static struct file_ operations adcmax1 324_
fops= {
open��adcmax1 324
һopen��
ioctl�� adcmax1 324
_ iocfl��
read��adcmax1 324_ read��
write��adcmaxl 324
_
write��
release�� adcmaxl 324
_
release��
}
�����B���Ўׂ���Ҫ�ĺ�����
(1)adcmax1324һwrite�������{��ԓ������ͨ�^�p����DATA0��DATA7��MAX1324���딵��OxOOFF����MAX1324�O�ó�8ͨ��ͬ�r�D�Q��ģʽ��
(2)adcmax1324һioctl������Ioctl������ۙ��̖������A��D�D�Q��(3)adcmax1324һread������read������
�Д�̎���������x���Ĕ����l���Ñ�����
�����init()����ɳ�ʼ������������ע���O���ӳ������Ոϵ�y�YԴ���ھ����ӳ���rͨ��������ģ�K����ʽ����ģ�K���d�r�{�ó�ʼ������module�� init()����ж�d�r�{��ж�dģ�K����module_ exit()��
3 �Y���Z

�������Ќ��F�˻�������ARM 9�_�l��������|���O�y�x�����ɼ����OӋ����B��Ӳ���·�������Pܛ���������yԇ������MAX1324ECM�����������ɼ��·�����y�ʴ_�ȿ����_��-4-0��5�� �����Y�����1��ʾ�����AX1324ECM��ȫ�m��������|���O�y�еĔ����ɼ���
|

