|
��������(sh��)��(j��)�ɼ�����ݔ��̎�����IJ�ͬ����ʽ������̎����֮�g�ɲ��ô��ڡ��������o(w��)���ȷ�ʽ��(sh��)�F(xi��n)��(sh��)��(j��)��ݔ����̎�����c��λ�C(j��)�Ĕ�(sh��)��(j��)��ݔ��ʽ��һ���ֲ��ô����c��λ�C(j��)ͨ�ţ��o(w��)����(sh��)�F(xi��n)���h(yu��n)�����C(j��)��(du��)ͬһ�z�y(c��)��(du��)����L��(w��n)�������O(sh��)Ӌ(j��)�˻���ARM �Ĕ�(sh��)��(j��)�ɼ��c�W(w��ng)�j(lu��)��ݔϵ�y(t��ng)���Ա����(g��)���C(j��)�L��(w��n)ͬһ�z�y(c��)��(du��)����(sh��)�F(xi��n)���C(j��)�h(yu��n)�̱O(ji��n)��ij䓼���������
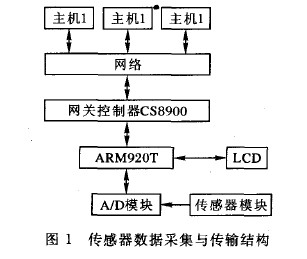
1 �ɼ�ƽ�_(t��i)Ӳ���O(sh��)Ӌ(j��)
����ARM920T��ARM ̎������A��D�D(zhu��n)�Q�Y(ji��)���W(w��ng)�j(lu��)�����ͨ�^(gu��)CS8900���f���W(w��ng)�j(lu��)�ϣ��W(w��ng)�j(lu��)�ϵ����C(j��)�ɽ��Ղ������Y(ji��)�������ڴ�ϵ�y(t��ng)�ό�(sh��)�F(xi��n)�h(yu��n)�̱O(ji��n)��ij䓼�������(�D1)��
1��1 ̎����
����ARM920T��(n��i)�˵�̎�������ͻ������ӵ�����O(sh��)���El(���|�����ӿڡ�LCD�ӿڡ�IICISP��IIS��A��D��USB)���m�϶��������z�y(c��)ƽ�_(t��i)�ܘ�(g��u)��������ֲLinux��uclinux�Ȳ���ϵ�y(t��ng)��miniGUI��QT ��(y��ng)�ó�����ARM9�wϵ��S3C2440��S3C2410�ǃɿ�16��32λRISCǶ��ʽ̎������оƬ�ϼ�����MPLL��ʹ��̎���������l������_(d��)��203 MHz���@�ɿ�̎�����Ѓɂ�(g��)8λ��SPI���нӿڣ��ɹ����ڲ�ԃ���ДࡢDMA 3�N������ʽ��ͨ�^(gu��)�O(sh��)���m��(d��ng)?sh��)Ĕ?sh��)��(j��)��ݔ�l�ʺ����Ĺ�����ʽ����ֱ���c���SPI����ͨ�ţ���Ҫע�����ÿ���xȡ�ⲿ�O(sh��)�䔵(sh��)��(j��)�r(sh��)�����8λ��ݔ�Ĵ�����1��
1��2 �������·
�D2��ʾ��y(c��)������׃�Q�·Ll �����ý��ّ�(y��ng)׃Ƭ�α�늘�z�y(c��)ֱ����1 cm��䓼����܉�������(y��ng)׃Ƭ�`����ϵ��(sh��)K��2��늘����ֵ��120 Q������߂��������`���ȣ�늘���LM358��(g��u)�ɵĺ���Դ�ṩ5 mA �����������̖(h��o)��(j��ng)�^(gu��)�·̎����ɷŴ�2 178��������ͨ�^(gu��)�{(di��o)��(ji��)����(d��ng)׃����RP ��(sh��)�F(xi��n)�{(di��o)������������z�y(c��)���õ�A��DоƬ��MAX147�����Ǿ���SPI�ӿڵ�12λ����8ͨ��ģ��(sh��)�D(zhu��n)�Qģ�K�������cARM ��SPI�ӿ���ӣ�ͨ�^(gu��)ܛ���x������ͨ�����鱣�CA��D�D(zhu��n)�Qģ�K�Ĺ������ȣ���LM385��MAX147�ṩ2��5 V�ą���늉��������cARM ��SPI�ӿ���ӣ�ͨ�^(gu��)ܛ���x������ͨ�����鱣�CA��D�D(zhu��n)�Qģ�K�Ĺ������ȣ���LM385��MAX147�ṩ2��5 V�ą���늉���
2 �ɼ�ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
�ɼ�ϵ�y(t��ng)��ܛ�����ְ���A��D�(q��)��(d��ng)���ֺ�TCP���֣�ARM ƽ�_(t��i)��λ���Ñ����g��TCP������{(di��o)��A��D�(q��)��(d��ng)��(sh��)�F(xi��n)��������(sh��)��(j��)�ɼ���
2��1 �(q��)��(d��ng)�����O(sh��)Ӌ(j��)
Linux�O(sh��)���(q��)��(d��ng)����ɷ֞��ַ����O(sh��)���(q��)��(d��ng)���K�O(sh��)���(q��)��(d��ng)����;W(w��ng)�j(lu��)�O(sh��)���(q��)��(d��ng)����MAX147�IJɼ��Y(ji��)����12λ���ַ����O(sh��)�䣬�錍(sh��)�F(xi��n)��Linux�h(hu��n)�����L��(w��n)MAX147����Ҫ�����ַ����(q��)��(d��ng)����(sh��)��������A��D�(q��)��(d��ng)���x������(sh��)���ִ��a��
A��DоƬMAX147�Č�����(sh��)����(sh��)�飺
static ssize�� t write(struct file *filp��const char_
user*buffer��size��
t
count��loff_t*offset)
{⋯
If(readb(rSPSTA)& C241o�� SPSTA_READY)
{copy_from_user(~buff��buffer��1)��
writeb(buff��rSPTDAT)��
return count��)
⋯ )
�x����(sh��)�飺
static ssize��
t read(struct file * flip��char�� user * buffer�� size��
t
count��lof_ t*offset)
{⋯ ��
if(readb(rSPSTA)&$3C2410һ SPSTA_ READY)
{writeb(OxO0��rSPTDAT)�� ��
if(readb(rSPSTA)&$3C2410һ
SPSTA
_
READY)
{from_buff=readb(rSPRDAT)��
copy_to_user(buffer��&from�� buff��count)��return count��}
}��������
��Ƕ��Linuxϵ�y(t��ng)��ARM ̎�����У��Ñ����g�L��(w��n)��ֻ����̓�M��ַ�����Ԟ��L��(w��n)SPI����������Ҫͨ�^(gu��)ioremap()����(sh��)����rSPTDATӳ���l(f��)�ͼĴ�����̓�M��ַ��rSPTDAT �� iorema(0x59000010��1)������(sh��)0x59000010��l(f��)�ͼĴ����Č�(sh��)�H������ַ���錍(sh��)�F(xi��n)ܛ����ԃ�Ĺ�����ʽ����Ҫ���ú���(sh��)write(readb(rSPCON)&��S3C2410��SPCON�� TAGD & S3C2410һSPCON �� CPH A һFMTA & S3C2410һSPCON �� SM OD �� POLL&S3C2410һ SPCON�� CPOL_HIGH��rSPCON)��SPI����������S3C2410һSPC0N��SM0D��P0LL����(sh��)���x������(sh��)������if(readb(rSPST A)��S3C2410һSPSTA�� READY)�xSPI��B(t��i)�Ĵ������Д�SPIģ�K�Ĺ�����B(t��i)���(q��)��(d��ng)ģ�K���x������(sh��)�քeʹ�ú���(sh��)copy��tO��user(buffer��&from�� buff��count)��copy��from�� user( buff��buffer��1)�c�Ñ����g�Б�(y��ng)�ó�����x������(sh��)���f��(sh��)��(j��).
2��2 TCP�����O(sh��)Ӌ(j��)
�錍(sh��)�F(xi��n)�����C(j��)�W(w��ng)�j(lu��)�����������(sh��)��(j��)�������������TCP��ʽ �M(j��n)�Д�(sh��)��(j��)��ݔ���D3�Ƿ���(w��)���˵ij������̈D������(w��)��ͨ�^(gu��)Listen()����(sh��)�O(ji��n) (t��ng)�͑��˵��B��Ո(q��ng)�͑��˟o(w��)��O(ji��n) (t��ng)(1isten())�ͽ����B��(accept())���E��ֻ����Ո(q��ng)�B��(connect()����(sh��)��(sh��)�F(xi��n))���ɫ@�Â�������(sh��)��(j��)���͑��˳���ͷ���(w��)���˳����ͨ�^(gu��)read()��write()����(sh��)��(sh��)�F(xi��n)ͨ�ţ���ϵ�y(t��ng)��ARM ƽ�_(t��i)�������(w��)����W(w��ng)�j(lu��)�ϵĶ�͑����ṩ�z�y(c��)��(sh��)��(j��)��
3 ԇ�(y��n)�Y(ji��)��
��(du��)�����z�y(c��)ƽ�_(t��i)�M(j��n)�И�(bi��o)�� ���Üy(c��)���z�y(c��)ϵ�y(t��ng)�ķǾ���У���������£�
Fһ16��95+24032��61Uһ3��15U ��
���Ǿ���У�����̵�3��(g��)ϵ��(sh��)����ϵ�y(t��ng)�У�������(j��)�z�y(c��)����늉�ֵ�õ�����ֵ��ARM ƽ�_(t��i)��IP��ַ��192��168��1��230����(du��)䓼�ʩ�Ӊ�����IP��ַ��192��168��1��x����λ�C(j��)ͨ�^(gu��)connect()����(sh��)��Ո(q��ng)��ӣ��õ�����������늉�ֵ����1�DZ��ɼ�ϵ�y(t��ng)��(du��)���ʩ�Ӳ�ͬ�����r(sh��)�ɼ��������M늉�ֵ��䓼���(du��)��(y��ng)������ֵ��
|

