|
ժҪ��ͨ�^��BFPGA�ĸ��N���÷�ʽ�������һ�N����ARM̎������FRGA�ӑB(t��i)���÷������������ARM̎�����������ٶȿ졢��(y��ng)�ÏV�����c���Y(ji��)��FPGA���������ԣ����F(xi��n)�ˌ�FPGA�ĄӑB(t��i)���ã�����Ԕ����FPCA���Ӵ������÷�ʽ�ĕr�o���������̈D�����F(xi��n)�ij�����a����ͨ�^������C��ԓ�����ă�(y��u)Խ�Լ���(y��ng)��ǰ����
�S���댧(d��o)�w��ˇ���g(sh��)��Ѹ�Ͱl(f��)չ���F(xi��n)���ɾ���߉����FRGA�ļ��ɶ�Ѹ����ߣ����_�����f�T�������c��ͬ�r��F(xi��n)PGA�е�߉�YԴҲ�����S����ʹ�û���FPGA��Ƭ��ϵ�y(t��ng)�O(sh��)Ӌ�ɞ���ܣ�����FPGA��Ƭ��ϵ�y(t��ng)�O(sh��)Ӌ��������_�l(f��)���ڶ̣��O(sh��)Ӌ�ɱ��ͣ�ܛӲ���ɾ��̣�ϵ�y(t��ng)�O(sh��)Ӌ�`��ɲÜp���ɔU�䡢�������ȃ�(y��u)�c���ڳɞ����ϵ�y(t��ng)�O(sh��)Ӌ���о����c�����ѽ�(j��ng)��ͨӍ�����ص��I(l��ng)��õ����H��(y��ng)�ã�
ĿǰFPGA�Č��F(xi��n)���g(sh��)���M�з�����Է֞���ڲ��ұ�(LuT��k��up table)���g(sh��)��SRAM��ˇ��FPGA������nash���g(sh��)��FPGA�ͻ��ڷ��۽z(Anti��fuse)���g(sh��)��FPGA����ʹ������߀�ǻ���SRAM��ˇ��FPGA����Altem��Cycl0ne��S tixϵ�С�xilin)����Spanan��Virtexϵ�У�����SRAM ��FPGAƬ��(n��i)���д惦����λ����sRAM����늕r�����惦�ڌ�������оƬ�е�������Ϣ���d��FPGA�У��Ķ����F(xi��n)һ����߉���ܣ���늕rƬ��(n��i)SRAM�е����Ô�(sh��)��(j��)�zʧ����Ҫ��һ�μ�늕r���¼��d���ã��@�NƬ��(n��i)��ʧ�惦���惦���Ô�(sh��)��(j��)�ĽY(ji��)��(g��u)��ʹFRGA�ÿ����ھ��ӑB(t��i)�Č���sRAM�е����Ô�(sh��)��(j��)�M�и��£��Ķ����F(xi��n)�·߉���܄ӑB(t��i)��׃��ϵ�y(t��ng)���ؘ�(g��u)��Ҫ�������û���sRAM��FPGA�@�N�ӑB(t��i)���������Բŵ��Ԍ��F(xi��n)�ģ��������Altem��˾Cyclone IIϵ��FPGA���������÷�ʽ������ؘ�(g��u)��(y��ng)�ã�
1 ���ؘ�(g��u)���÷���
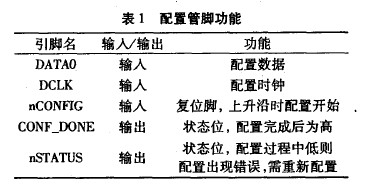
����(j��)FPGA�������^���еĽ�ɫ�ɰ�cyclone IIϵ��FPGA�����÷�ʽ�֞����N��FPGA���Ӵ���(As)��ʽ��FPGA���Ӵ���(PS)��ʽ��JATG��ʽ����ͬ����ģʽͨ�^����ģʽ�x����_MsEL[1��0]�M���x������MsEL[1��0]=o0�r�x��Asģʽ��MsEL[1��O]=01�r�x��PSģʽ������ijЩ��������������(d��ng)MsEL[1��0]=l0�r�����ASģʽ�������ٶȱ�PSģʽ��һ����Cyclone IIϵ��FPGA֧�����Ô�(sh��)��(j��)�Խ≺�������s�����Ô�(sh��)��(j��)�惦�����������������惦���У����Õr���͉��s��λ����(sh��)��(j��)��FPGA�У�F(xi��n)PGA�Ɍ��r�Ľ≺�s������(n��i)��sRAM�M�о��̣����Ô�(sh��)��(j��)�ĉ��s�������_35��-5O�� ������Ч��(ji��)ʡ���ô惦���g��
��As��ʽ�£���FPGA����ݔ�����ƺ�ͬ����̖�o���ô�������оƬ������оƬ���յ�����������_ʼ�����Ô�(sh��)��(j��)���еİl(f��)����FPGA��������ù�����Ŀǰ���õČ��ô�������оƬ��������4 Mb��EPCS4��16 Mb��EPcS16�ȣ�AS����ģʽ��Ҫ�õ��Ă���̖�����Д�(sh��)��(j��)ݔ��DcLK��������̖ݔ��AsDI��Ƭ�x��̖ncs�ʹ��Д�(sh��)��(j��)ݔ��DATA��
��PS��ʽ�£���ϵ�y(t��ng)�������O(sh��)��l(f��)�������^�̣�F(xi��n)PGA�������^����ֻݔ����(y��ng)����̖���l(f��)����������^�̵��O(sh��)�������̎������Altem EPCϵ������оƬ��CPLD�ȹ����O(sh��)�䣮����һС��(ji��)����PS���÷�ʽ��Ԕ���Ľ�B��JTAG�{(di��o)ԇ�ӿ��ѽ�(j��ng)����һ����(bi��o)��(zh��n)�ӿڼ�����оƬ��(n��i)����Ҫ����оƬ�Ĝyԇ��cycl0ne IIϵ��FPGA��֧��JTAG��ʽ��FPGA�M�����ã�JrrAG��ʽ���б��������÷�ʽ���ߵă�(y��u)�ȼ���JrI'AG�ӿڶ��x���Ă���(bi��o)��(zh��n)��H̖��
�� rI��K�yԇ�r犣����N��̖����Ҫ�c�yԇ�r�ͬ����
�� TDI�yԇ��(sh��)��(j��)ݔ�룬�yԇ��(sh��)��(j��)����ݔ�룬��(sh��)��(j��)��TCK�������ͣ�
�� TDO�yԇ��(sh��)��(j��)ݔ�����yԇ��(sh��)��(j��)����ݔ������(sh��)��(j��)��TCK�½����ͣ�
��TMs�yԇģʽ�x�Q��JTAG�·��(n��i)��TAP��������B(t��i)�C��׃����
2 ����ARM�����÷��������F(xi��n)
2��1 PS����ԭ��
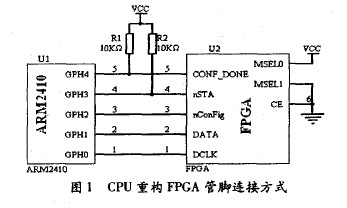
��Dl��ʾ������s3c2410x���������������ñ��Ӵ��з�ʽ��EP2c20��(n��i)��߉�M���ؘ�(g��u)��FPGA��PS���÷�ʽ�DZ��^���õ�һ�N���÷�ʽ��������Ч���F(xi��n)FPGA���ھ����ã���������̞飺��ϵ�y(t��ng)�Ќ�FPGA�������÷�ʽ���ýӿ��cARM̎������IO���_���B����̎������ͨ�^ܛ����������(y��ng)���_�ĸߵ��ƽ����(sh��)��(j��)���еİl(f��)�͵�FPGA�У��ؘ�(g��u)�����\����ARM̎���������錍�rϵ�y(t��ng)��һ���΄�(w��)����(d��ng)��Ҫ����FPcA��(n��i)��߉�r���{(di��o)������(y��ng)�΄�(w��)��������ɺh����(d��ng)ǰ�΄�(w��)���ɣ���ˣ��Ɍ��A(y��)�Ƚ����������ļ���惦��ARM��nash�У���ARM̎�������\�е����ó������ɄӑB(t��i)�ؘ�(g��u)�΄�(w��)��FPGA�cPs���÷�ʽ���P(gu��n)�Ĺ��_�������l��ʾ��
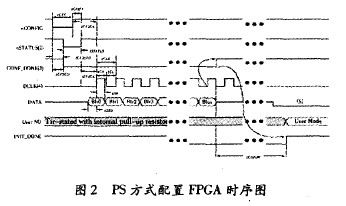
���������^�ׂ̎��P(gu��n)�I��̖�ĕr��D��D2��ʾ�������^�̿��Է֞��(f��)λ�����úͳ�ʼ�������A�Σ�
�ڏ�(f��)λ�A�Σ�̎����������nc0NFIG��̖���Ϯa(ch��n)��һ�����ȴ���8 s��ؓ�}�_��Ȼ���_ʼ�z�ynsTATus��̖�Ġ�B(t��i)��FPGA�z�y��ncONFIG��̖���½��غ����ʹnsTATus��cONF��DONE��̖���ͣ�ʹFPGA̎�ڏ�(f��)λ��B(t��i)����(d��ng)ncONFIG׃?y��u)���ƽ�r��F(xi��n)PGA�˳���(f��)λ��B(t��i)��ጷ�©���_·��nSTATUS���_��nSTATuS���ⲿ��Ҫ��l0 K������������ߣ�nSTATUS���_׃?y��u)���ƽ��F(xi��n)PGA���M�������A�Σ��˕r��F(xi��n)PGA�������˽������Ô�(sh��)��(j��)�Ĝ�(zh��n)�䣮
FPGA��nsTATuS���_׃�ߺ��ӕr5 s���ң���DCLK��������FPGA���ɏ�DA L0���_���еĽ������Ô�(sh��)��(j��)�����Ô�(sh��)��(j��)����λ���ȸ�λ�ں�����Ĕ�(sh��)��(j��)�����ͳ�����(d��ng)���Д�(sh��)��(j��)���������ጷ�©���_·��CONFIG�� DONE���_��CONFIG��DONE���_���ⲿ��Ҫ��10 K������������ߣ�CONFIG��DONE���_�ɵ͵��ߵ���׃���������A�νY(ji��)����F(xi��n)PGA�M���ʼ���A�Σ�����������^���г��F(xi��n)�e�`���tn rATuS���_��ݔ�����ƽ��F(xi��n)PGA�ڃ�(n��i)���Ԅӏ�(f��)λ��̎��������ͨ�^��ԃns1IATuS���_��B(t��i)�Д��������^�����Ƿ����e�`�l(f��)�������nsTATuS���_�������^����׃�̈́t�������e�`�l(f��)���������ܛ�����O(sh��)�����e�`�l(f��)�����Ԅ������_ʼ�����x헄tFPcA���ӕrһ�Εr�g��ጷ�nsTATuS���˕rnsTATuS���ⲿ����������ߣ�CPu��nsTA��Tus�ϙz�y��һ���ɵ͵��ߵ���׃�������_ʼ���ã���ܛ����δ�O(sh��)�á��e�`�l(f��)�����Ԅ������_ʼ���á��x헄t��ҪCPu���Ȍ�nCONFIC���_�õ����������_ʼ�������ã�
�ڳ�ʼ���A�Σ���ʼ���r犿�����FPGA��(n��i)���r犻��ⲿ��CLKusR���_�ṩ�ĕr犣�����ʹ����FPGA��(n��i)���r犣�F(xi��n)PGA�����ʼ���ṩ�r犣��@�ӣ���ʼ���A�β�����Ҫ�ⲿ�r犣���ʼ���A����ɺ�INIT��DONE���_׃?y��u)���ƽ��ָʾFPGA�ɹ��M���Ñ�ģʽ�������^�̽Y(ji��)������Ҫע����ǣ����˕rCONF��DONE��INIT_DONEδ׃?y��u)���ƽ���t�����˴������^�̲��ɹ�����ҪcPu�����M�����ã�
2��2 ���ó����O(sh��)Ӌ
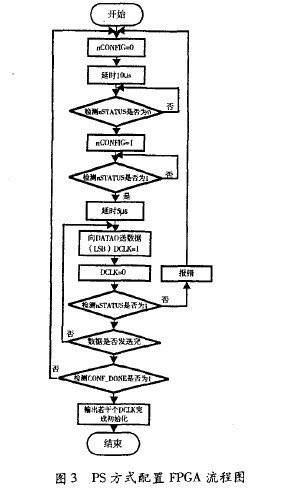
�������������ؘ�(g��u)�������̈D(�D3��ʾ)������s3c24lOx ARM̎���� ��C��OS��II���r����ϵ�y(t��ng)��һ���΄�(w��)�\�У����ڹ��̑�(y��ng)����Ҫ�Y(ji��)�ό��H��r���m��(d��ng)�ģ�
���ڦ�C��OS��II���ó���
U8Fpga��DownLoad(v0id)
{U8 Bootaddr��
U32 CountNum =O�أ�
u8 FpgaBu�磻
U16 i��
Bo0taddT��(u8 )(O��(33ooooo0)���� ���Ô�(sh��)��(j��)��ʼ��ַ ��
SeI�� Datao(O)��
seLnCONFIG(0)����_��ncONFIG�õ��ƽ ��
set�� DCLK(O)��
hude1ay(10)����}�ӕr1O ��
if(Re��һnSTATUS)
{prin (��err0r��nSTATuSis 1 1��)��
retum O��}
Set�� nC0NFIG(1)��
while(!Read��nsTATUS)��
hudelay(5)��
p nd(��ʮco gIlre FPGA��-)��
while(c0untNum <=O)(24294)��}��������(sh��)��(j��) ��
{FpgaBu��er= (Bo0t��ddT+c0un um)��
if(!(CountNum��1O24))pdnd(������)��
f0r(��_O��i<8��i++)
{Set��Data0(FpgaBu�� �_ 1)��
hudelay(1)��
seLDCLK(O)��
FpgaBu��r> > = 1��
if(!Rea��һns1��ATUS)
{ nEf(����n����C0 gure Error��nsTATus is 0 1��n )��
ren��m O��}
Set�� DCLK(1)��
}
C0untNum + + ��
}
SeI�� Datao(O)��
S eI�� DCLK(O)��
if(!Reau��nsTATuS)
{p ntf(����n��r��Configure Ermr��nsrATus is O!��n��r )��
retum O��}}
else if(Read��nC0NF��Done)
{p ntf(����n�ܲ�-Co gure success! ��n )��}
fnr(i=O��i(5O��i++)�� ��ʼ�� ��
{Set��DcLK(1)��
hudeIay(1)��
Set�� DCLK(O)��
hude1��dy(1)��} ��
if(!Read��nC0NF��D0ne)
{printf(����r��n��configure En r��nCO F��Done is 0 1��)��
retum 0��}
retum l��
{
3 ���ؘ�(g��u)���Ñ�(y��ng)��
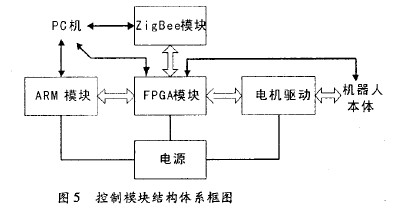
�Y(ji��)���������ؘ�(g��u)���÷������҂�������FPGA���ؘ�(g��u)���ԣ����F(xi��n)ģ�K���C���˿��������O(sh��)Ӌ��ģ�K���C���˽Y(ji��)��(g��u)��(f��)�s������늙C��(sh��)���࣬����ᘌ���ͬ��(g��u)�ο��Ʋ���Ҳ�в�e���������ɶȴ�(li��n)ʽ�C���֘�(g��u)�κ�ȫ���Ƅ�С܇��(g��u)��(�D4��ʾ)�Ŀ��Ʋ��Ե�����늙C��(sh��)�����кܴ�IJ�ͬ���@��Ҫ����������Ը���(j��)��ͬ��(g��u)�΄ӑB(t��i)�ĸ�׃���Ʋ��ԣ�Ҳ���������Ŀ��ؘ�(g��u)����ˣ���ģ�K���C���˿��ؘ�(g��u)����ģ�K�Y(ji��)��(g��u)�O(sh��)Ӌ�У��������ARM��FPGA�ĄӑB(t��i)���ؘ�(g��u)��ģ�K���C���˿���ϵ�y(t��ng)�������������Ƕ��ʽARM��̎���������ܡ����ġ��YԴ�S���ȷ�������ܺ�FPGA��(n��i)��߉���ؘ�(g��u)�����ԣ�����̎��������(j��)�C���ˮ�(d��ng)ǰ��(g��u)���x��ͬ�Ŀ��Ʋ��Բ���FPGA��(n��i)��߉�M�ЄӑB(t��i)���䣬���m��(y��ng)��ͬ��(g��u)�μ���(y��ng)�õ���Ҫ���Y(ji��)��(g��u)�O(sh��)Ӌ��D��D5��ʾ��
ARMģ�K�x��s3c241Ox�\�� C��OS��II���r����ϵ�y(t��ng)��ؓ؟(z��)�\�п���ܛ�������ģ�K���C�����\��Ҏ(gu��)�������r�O(ji��n)��ϵ�y(t��ng)�\�Р�B(t��i)�����F(xi��n)�˙C�������ܼ���FPGA��(n��i)��߉���r�ؘ�(g��u)��FPGA��(n��i)���\��ܛ��̎������ؓ؟(z��)�cģ�K���C�����\�ӿ������P(gu��n)���΄�(w��)�����C���ơ�ֱ��늙C���ơ�ϵ�y(t��ng)IO���ơ���������(sh��)��(j��)�ɼ����΄�(w��)��
��FRGA���ò���������ARM��PS���÷�����ƽ�_���������FPcA��(n��i)��߉���ؘ�(g��u)�����ԣ��ɽM�ɶ�N��ͬ��(g��u)�Σ���ͬ��(g��u)�ξ��в�ͬ�������Y(ji��)��(g��u)�Ϳ��Ʒ�ʽ���ԝM�㲻ͬ�΄�(w��)�������ؘ�(g��u)�������ã�
(1)����(j��)���w��(g��u)��Ҏ(gu��)��ϵ�y(t��ng)Ӳ���YԴ�N��瘋(g��u)����Ҫ��ֱ��늙C��(sh��)������C��(sh��)����ϵ�y(t��ng)I����O��(sh��)���Լ����N�������Ĕ�(sh��)Ŀ��
(2)����(j��)Ӳ���YԴ�N���FPcA��(n��i)��߉�����F(xi��n)Ӳ���Ӵεġ��ؘ�(g��u)����
(3)����(j��)FPGA߉��׃�����M��ܛ�����_�l(f��)�����F(xi��n)ܛ���Ӵεġ��ؘ�(g��u)����
(4)��FPGA�����ļ����d��ARM�Ĵ惦���У�ϵ�y(t��ng)��늺�ARM�Y(ji��)������ͨ�^�xȡ����(y��ng)�惦�^(q��)����
���ļ���FPGA�M�����ã����F(xi��n)����ϵ�y(t��ng)�ĄӑB(t��i)�ؘ�(g��u)��
��(j��ng)�^�����C������ARM�Č��r̎�����ܣ���FPGA��(n��i)��߉�M�ЄӑB(t��i)���䣬���O(sh��)Ӌ�Ŀ���ƽ�_���ԝM����ؘ�(g��u)���õ�����Ҫ��
4 �Y(ji��)�Z
���нo���˻���ARM��Ps���d���÷�����ԓ�����·�Y(ji��)��(g��u)���Ρ����ڌ��F(xi��n)���������ARM̎�����������ٶȿ졢��(y��ng)�ÏV�����c����ϵ�y(t��ng)�п��A(y��)�Ȱ���������ͬ���ܵ������ļ�������(j��)�F(xi��n)������Ҫ�M������(y��ng)�����ã����F(xi��n)�ھ�����FPGA���ܣ��ȹ�(ji��)ʡ���_�l(f��)�ɱ����֝M����һЩ�����ϵ�y(t��ng)�O(sh��)ӋҪ��Ҳ����@ʾ��FPGA�F(xi��n)���������`���\�õ��O(sh��)Ӌ����������������Ƕ��ʽ��(sh��)��ϵ�y(t��ng)�O(sh��)Ӌ�����ஔ(d��ng)?sh��)Ľ��b���x��
|

