|
ժ Ҫ�����˿˷���ҎPID���������^С���m���Լ��������^�����̖�y����ȡ��ȱ�ݣ����÷Ǿ��Կ�����Փ�����ڷǾ��Ը�ۙ������PIDУ����˼�룬�OӋ��һ�N�����oֹ�o���a����(SVC)�����ͷǾ���PID���������@�N���������в���ه�ڱ���ϵ�y֪�R�����c����ϵ�y�����c�;W�j�Y����׃���������õ��������ҽY�����Σ����ڌ��F����ֵ����Y���������@�N�Ǿ���PID�������Ŀ���Ʒ�|�ã���������Ч�ظ������ϵ�y���Ƿ����Ժ�SVC���b�c��늉��ӑB���ԣ����Ҿ����^�����m���Ժ������ԡ�
����1 ����
�����Ǿ���PID���������{��ԭ��飺���Å���ݔ���ϵ�yݔ����ƫ����֡��e�ֵķǾ��ԽM�ρ��a��������̖�����÷Ǿ������ԁ����Ʊ���ϵ�y�ķ��Bƫ����B�^�̡��Ǿ���PID�������Ŀ�D��D1���D�У�̓���֞�Ǿ���PID������;v0(t)��ϵ�y�ą���ݔ��;u(t)��y(t)�քe��ϵ�y�Ŀ���ݔ�롢ݔ��;  �քe��ƫ�ƫ��ķe�ֺ�ƫ����֡� �քe��ƫ�ƫ��ķe�ֺ�ƫ����֡� 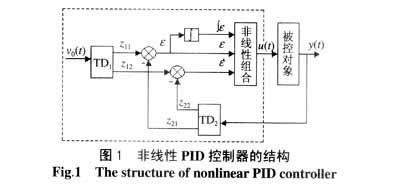
������ۙ-����[4, 5]TD1���ڽo��v0(t)������^���^��z11(t)�����o��������^���^������̖z12(t)�����еą��������^���^�̵Ŀ���Ҫ�����;��ۙ-����TD2��Ҫ�M���ԭy(t)���o��������֣���ˣ����еą���Ҫȡ��������2����ۙ-���������ɽ�Q����ľ���PID������������̖������ȡ�Ć��}��
��������Ҫ�صķǾ��ԽM���Ǟ��˽�Q���ԽM�ώ����ij��{�Ϳ���֮�g��ì�ܡ��_���Ǿ��ԽM�ϵ�һ�������˜��ǣ��;��ԽM����ȣ�ƫ��С�r�������^�����;ƫ���r�������^С���ơ�
�����Ǿ���PID�������ą���ֻȡ�Q�ڌ���ĽY����ijһ�ض������{���ˣ�����һ����Ŀ�˻�ԭ�t�������ҳ��m���ԡ������Ժܺõ�һ�M����[5, 6]��
����3 SVC�Ǿ���PID���������OӋ
����3.1 ���Wģ�� 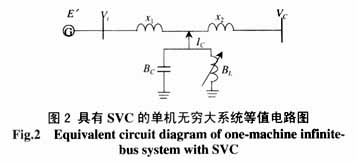
��������SVC�ĆΙC�o�F��ϵ�y��ֵ�·�D��D2��ʾ�����O�l늙C���ý�����Aģ�ͣ��㶨���䔵�Wģ�͞� 
����ʽ�� d��l늙C�D�ӓu�[��;Dw��l늙C�D�ӽ��ٶ�����;w0��ϵ�yͬ�����ٶ�;D��l늙C����ϵ��;H��l늙C�M�D�ӵđT�ԕr�g����;Pm��l늙C�Cе����;uB��SVC���Ƶ�ݔ��;TB��SVC���{��ϵ�y�đT�ԕr�g����;BL��SVC�п��{늸е�Ч늼{ֵ;BL0��SVC�п��{늸г�ʼ늼{ֵ;Pe��l늙Cݔ����늴Ź��� 
����3.2 ����SVC�ķǾ���PID���������OӋ
������ʽ(1)�Č���  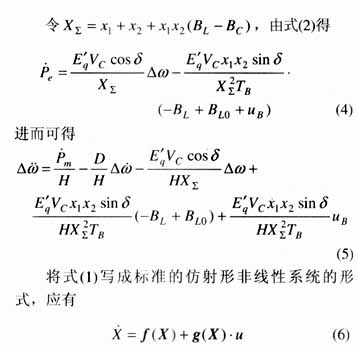 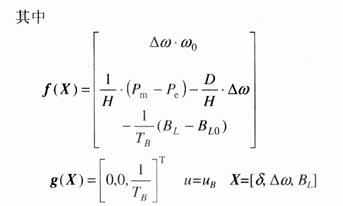
����ʽ(7)��ʾ��һƽ������Ǿ���ϵ�y��ͨ�^һ��������׃�Q�����÷������Ի�����ʹ���D���龀��ϵ�y�������ڿ��������OӋ�������֎���Փ��ֱ�Ӿ��Ի��������xȡ��K����׃�Q�� 
������ʽ(8)��(9)����ʽ(10)���õ�SVC�ķǾ��Է����a��Ҏ�ɞ� 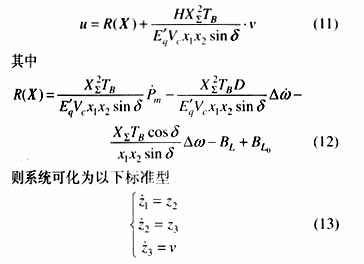
����ʽ�� z1��z2��z3�鷴�����Ի�ģ�͵Ġ�B׃����v��ģ�͵�̓�M����׃����
����̓�M������v��ᘌ��������Ի���Ę˜����OӋ����Փ�����C�����������Ի����ϵ�y�cԭϵ�y������ͬ���ܿ��ԡ����Կ������oՓ�l늙C�Ĺ����c���׃����ʽ(11)����ʽ���Dz�׃�ģ��Ķ����C�˷Ǿ���PID��SVC��������ϵ�y�����c��׃�������^�õ������ԡ���һ���棬����ʹ����������ϵ�y�W�j�Y����׃�������^���������ԣ���ʽ(13)���xȡz2���l늙C���ٶ��`��׃�����؞鷴��׃�������ɄӑB�����a�����t׃�Q��İl늙C���ٶ��`��׃�����_ʽ�� 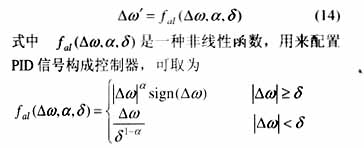
����ʽ�� �Ğ�Q��fal(����,��,��)�������ԅ^�g��С�ą���;����Q��ԓ�����ķǾ����Π�ą���(�Ǿ��Զ�)��
��������MATLAB���湤��ԇ�㣬���ȶ�M��ͬ���ԅ^�ͷǾ��Զȵ�Ӌ��Y�����C�Ͽ��]ϵ�yָ�˸��Ƴ̶Ⱥ��A��ϵ�y�l�����l���F�����Ҫ���_��a =0.4��d =10-4��
��������ʹ�l늙C�_�����ٷ������Ǿ���PID���Ƶ�Ŀ�˱��ʹ�l늙C���Ǻͽ��ٶȱM��ͬ�rڅ���ڷ��Bֵ�������Z1(����/��0)��z2(����)�M��څ�����㣬��ˣ�����MATLAB���湤�ߵĶ��ԇ���M�Ѕ����ă����x���������l��(a, d)�£��@��z1��z2�����^����ϵ�y�����^С��һ�MPID����ֵ�飺 
����4 ��ֵ�������
��������ϵ�y��D3��ʾ���l늙C���W�j������: 
�����ϸ����Ć�λ�������ֵ)��H=42 s��Td0=10.2s������l���飺ϵ�y��t =0.1 s��F�c�l�������·����, t =0.18 s��������, Pe=7.0�� 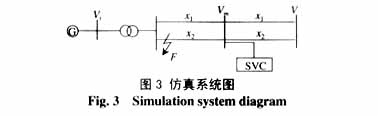
�����D4�o����ϵ�y�ڳ�ҎSVC�������ͷǾ���PID��SVC�����������µ�푑�����������, ������̓���քe�����ڷǾ���PID��SVC�������ͳ�ҎSVC�����������µ�푑�������
|

