
節(jié)卡機器人發(fā)布國內(nèi)首份協(xié)作機器人技術(shù)報告
http://www.kblhh.cn 2022-06-22 17:24 來源:節(jié)卡機器人

6月22日,機器人行業(yè)高端智庫立德智庫攜手全球柔性智能機器人領(lǐng)跑者節(jié)卡機器人聯(lián)合發(fā)布《2022年中國協(xié)作機器人技術(shù)發(fā)展報告》(以下簡稱“報告”),圍繞協(xié)作機器人前沿技術(shù)展開分析,論述了協(xié)作機器人智能感知、自主認(rèn)知、人機交互、碰撞檢測等技術(shù)發(fā)展趨勢。
來自上海交通大學(xué)、北京理工大學(xué)、上海機器人產(chǎn)業(yè)技術(shù)研究院、立德機器人研究院及節(jié)卡機器人的多位行業(yè)專家出席線上發(fā)布會,共同探索協(xié)作機器人關(guān)鍵技術(shù)和創(chuàng)新應(yīng)用。
報告獲取方式:
關(guān)注“節(jié)卡機器人”微信公眾號,在菜單欄點擊 “技術(shù)報告”在線申請。
前沿發(fā)展趨勢一:智能感知——多學(xué)科交叉融合
感知是協(xié)作機器人與人、協(xié)作機器人與環(huán)境、以及協(xié)作機器人之間進(jìn)行交互的基礎(chǔ)。就感知技術(shù)而言,除了多傳感信息融合之外,協(xié)作機器人越發(fā)呈現(xiàn)出與腦神經(jīng)科學(xué)、生物技術(shù)、人工智能、認(rèn)知科學(xué)、網(wǎng)絡(luò)大數(shù)據(jù)技術(shù)等深度交叉融合的態(tài)勢。
未來的研究方向為主動感知與自然交互理論及方法,更多傳感器的加入,使協(xié)作機器人能夠理解人類指令(通過聲音、手勢、圖形)。基于對復(fù)雜動態(tài)環(huán)境下知識的主動獲取、學(xué)習(xí)與推理方法、視覺認(rèn)知與基于動態(tài)環(huán)境的主動行為意圖理解與預(yù)測理論、協(xié)作機器人的自主學(xué)習(xí)與機器人知識增殖方法、以及多模態(tài)人機協(xié)作的態(tài)勢感知與自然交互方法的研究,實現(xiàn)協(xié)作機器人與人之間相互的意圖理解、信息交流,以及自然和諧的情感交互。


前沿發(fā)展趨勢二:自主認(rèn)知——復(fù)雜環(huán)境靈巧作業(yè)
高度智能是對新一代協(xié)作機器人的重大共性技術(shù)需求。當(dāng)前協(xié)作機器人應(yīng)用面越來越廣,在復(fù)雜作業(yè)能力、自適應(yīng)可重構(gòu)的裝配能力、對非結(jié)構(gòu)化環(huán)境的感知能力,以及與人協(xié)作能力方面需要更加智能化。
協(xié)作機器人應(yīng)用于在商業(yè)服務(wù)市場,主要挑戰(zhàn)包括自然交互、人機安全、環(huán)境適應(yīng)、復(fù)雜靈巧作業(yè)等方面,智能化是應(yīng)對挑戰(zhàn)的可行技術(shù)途徑。

協(xié)作機器人工作于復(fù)雜、嚴(yán)苛的工業(yè)環(huán)境,需要更為智能化的環(huán)境感知和適應(yīng)能力、人機協(xié)同作業(yè)能力和異常處理能力。先進(jìn)的認(rèn)知算法是實現(xiàn)協(xié)作機器人高度智能的主要手段。
未來的研究方向為復(fù)雜環(huán)境的自主認(rèn)知。深入研究面向復(fù)雜環(huán)境與復(fù)雜任務(wù)的自主控制,辨識協(xié)作機器人的動力學(xué)行為和智能操控與環(huán)境之間的關(guān)系和影響規(guī)律,實現(xiàn)協(xié)作機器人靈巧作業(yè)與自主控制。
前沿發(fā)展趨勢三:人機交互——機器人操作智能化
隨著人機交互技術(shù)的快速發(fā)展和人機工程學(xué)、用戶體驗等領(lǐng)域的研究逐步深入,現(xiàn)有的一些人機交互系統(tǒng)不再是僅限于鼠標(biāo)與鍵盤等簡單的設(shè)備輸入或示教操作,有些可通過語音識別、指紋識別甚至是虹膜識別,來完成工作程序的輸入。
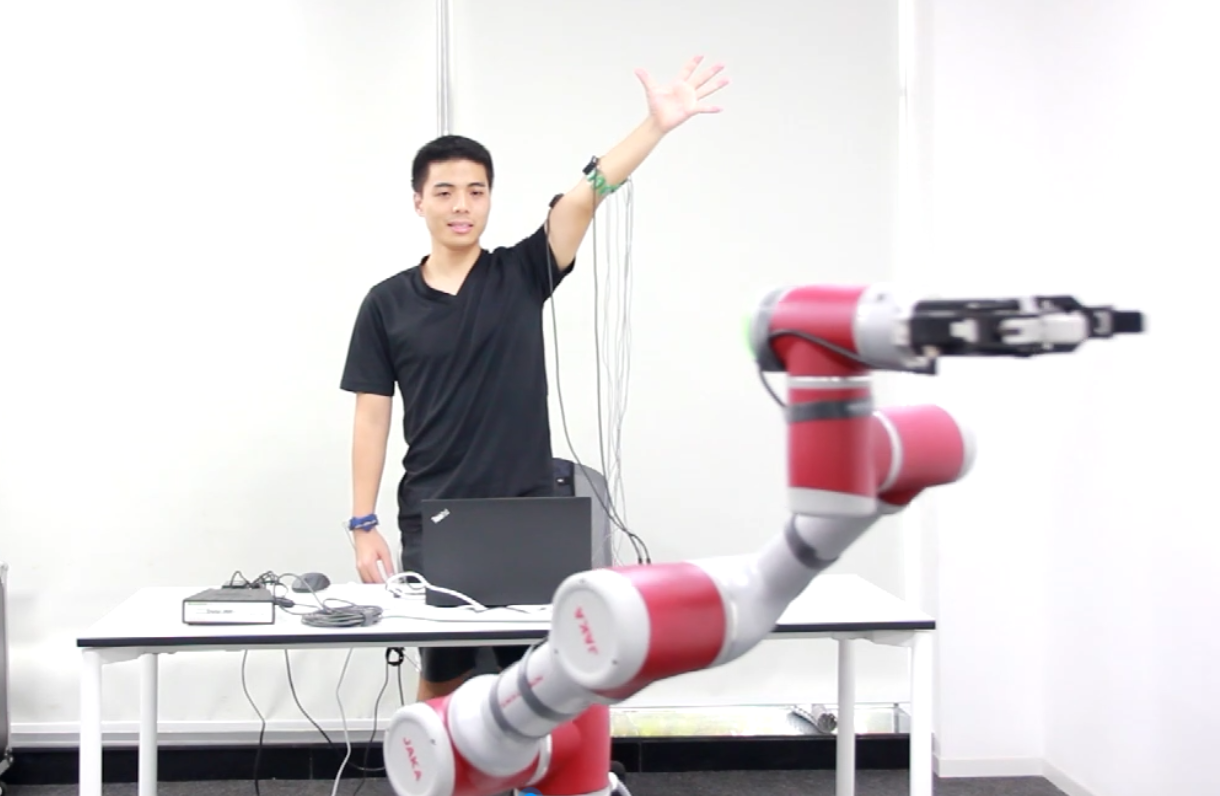
人們對協(xié)作機器人可用性與易用性的要求越來越高,手勢理解用于人機交互已成為人機交互技術(shù)重要的研究內(nèi)容。通過連續(xù)的手勢識別操作協(xié)作機器人是人機交互技術(shù)的熱門研究方向之一,擁有很廣泛的應(yīng)用領(lǐng)域。
手勢識別是基于人的手部動作完成的,工業(yè)生產(chǎn)中,通過手勢控制機器人運動,可簡化機器人的示教過程與操作流程,具有很大的應(yīng)用價值。現(xiàn)今,在手勢識別領(lǐng)域最為突出的研究方法包括基于手套進(jìn)行識別以及使用視覺信息進(jìn)行識別。使用手套的識別方法主要是使用光纖等獲取手掌、手指的關(guān)節(jié)位置以及彎曲程度并建模。基于視覺的識別方法是指從相機獲取手勢視覺圖像進(jìn)行一系列算法處理,進(jìn)行識別獲取結(jié)果。
前沿發(fā)展趨勢四:碰撞檢測——自適應(yīng)柔順控制
碰撞檢測一般有基于傳感器的碰撞檢測和基于無傳感器的碰撞檢測。
基于傳感器的碰撞檢測有基于電子皮膚的檢測方式,基于關(guān)節(jié)扭矩傳感器或基于底座、末端六維傳感器的方式檢測碰撞。除了這類碰撞檢測方法,其他的碰撞檢測大多需要構(gòu)建協(xié)作機器人的動力學(xué)模型,估計外力或構(gòu)建觀測器。當(dāng)外力或觀測器監(jiān)測到干擾時則表示碰撞發(fā)生。
基于無傳感器的碰撞檢測,首先,通過人與協(xié)作機器人接觸時單關(guān)節(jié)電機電流的檢測,來判定協(xié)作機器人與人是軟接觸或是碰撞接觸。其次,根據(jù)當(dāng)前的電機反饋得到的電流實際值與動力學(xué)模型計算中的理想值來設(shè)計融合算法,產(chǎn)生時變的電力碰撞檢測閾值,辨識事故碰撞或人有意識的軟接觸,解決人與協(xié)作機器人接觸后的安全性碰撞問題。


相關(guān)新聞
- ? 多元場景下,中國工業(yè)機器人走出差異化 AI 路徑
- ? 四個月兩度“加油”,越疆再配股募資7.7億港元
- ? 小鵬新一代人形機器人IRON亮相:首推女性形態(tài),目標(biāo)2026年規(guī)模量產(chǎn)
- ? ABB機器人韓晨:本土供應(yīng)商超80%,“十五五”在華大有可為
- ? 科技巨頭再投500億瞄準(zhǔn)這個賽道
- ? 全資子公司變更 美的“機器人”走上臺面
- ? 越疆機器人與浪潮云正式簽署全球戰(zhàn)略合作協(xié)議
- ? 利潤同比暴增232.35%,工業(yè)機器人企業(yè)2025三季度業(yè)績出爐!
- ? 第二屆工業(yè)自動化與機器人國際學(xué)術(shù)會議暨半導(dǎo)體與集成電路創(chuàng)新論壇成功舉辦
- ? 藍(lán)思科技與越疆機器人達(dá)成戰(zhàn)略合作并下達(dá)1000臺機器人采購訂單
編輯精選
- ? 東土科技連投三家核心企業(yè) 發(fā)力具身機器人領(lǐng)域
- ? 第七屆工業(yè)互聯(lián)網(wǎng)大賽在京正式啟動
- ? 珞石機器人沖刺港交所主板上市
- ? 9月RatingDog中國制造業(yè)PMI升至51.2,延續(xù)擴張態(tài)勢
- ? ABB與軟銀簽約擬出售機器人業(yè)務(wù)
- ? 全球工廠機器人需求十年翻番——國際機器人聯(lián)合會發(fā)布《2025年世界機器人報告》
- ? 2025年度綠色工廠推薦工作啟動
- ? 羅克韋爾自動化重磅推出 ControlLogix 5590 控制器,引領(lǐng)工控新時代
- ? 華為系公司賽力斯與字節(jié)合作具身智能,問界要開發(fā)人形機器人?
- ? 40.5萬億元工業(yè)增加值 工業(yè)家底更厚實
工控原創(chuàng)
- ? 十月工控領(lǐng)域重要資訊,一睹為快!
- ? 回顧 | 以技術(shù)干貨 + 落地案例,解鎖產(chǎn)業(yè)升級新路徑
- ? ABB報告:工業(yè)停機每小時損失高達(dá)50萬美元,知行鴻溝阻礙現(xiàn)代化更新
- ? ABB宣布以53.75億美元將機器人業(yè)務(wù)出售給軟銀
- ? 九月不容錯過的工控圈大事
- ? 當(dāng)“軟件定義”與“價值鏈”相遇,未來工業(yè)走向何方?
- ? 西門子:以“一次正確”破局內(nèi)卷,讓工業(yè)AI真正落地
- ? “四大家族”“四小龍”齊聚,工博會機器人展的亮點都在這了!
- ? 2025工博會開幕,工業(yè)AI釋放創(chuàng)新潛力
- ? 繁易的戰(zhàn)略進(jìn)擊:從HMI到PLC,走向全棧式自動化融合創(chuàng)新


