
工業(yè)機器人如何精準(zhǔn)選型?這9大參數(shù)告訴你
http://www.kblhh.cn 2022-05-07 08:47 來源:中國機器人網(wǎng)
前言
工業(yè)機器人如何精準(zhǔn)選型?
對于自動化行業(yè)的老鳥,資深的機電工程師來說,選擇合適的“機器人”也許是一個簡單的工作。但是對于那些第一次準(zhǔn)備購買、導(dǎo)入機器人的設(shè)計人員或工廠來說,也許會有些迷茫。
下面,我們從9個專業(yè)的參數(shù)方面,來告訴你如何選擇一個合適的工業(yè)機器人。
01 應(yīng)用場合
首先,最重要的源頭是評估導(dǎo)入的機器人,是用于怎樣的應(yīng)用場合以及什么樣的制程。
若是應(yīng)用制程需要在人工旁邊由機器協(xié)同完成,對于通常的人機混合的半自動線,特別是需要經(jīng)常變換工位或移位移線的情況,以及配合新型力矩感應(yīng)器的場合,協(xié)作型機器人(Cobots)應(yīng)該是一個很好的選項。
如果是尋找一個緊湊型的取放(Pick& Place)料機器人,你可能想選擇一個水平關(guān)節(jié)型機器人(Scara)。
如果是尋找針對小型物件,快速取放的場合,并聯(lián)機器人(Delta)最適合這樣的需求。
接下來的討論,我們將針對垂直關(guān)節(jié)多軸機器人(Multi-axis)。這種機器人可以適應(yīng)一個非常大范圍的應(yīng)用。從取、放料到碼垛,以及噴涂,去毛刺,焊接等專用制程。現(xiàn)在,工業(yè)機器人制造商基本上針對每一種應(yīng)用制程都有相應(yīng)的機器人方案。你所做的只需要明確你希望機器人為你做哪個工作,以及從不同的種類當(dāng)中,選擇最適合的型號。
02 有效負(fù)載
有效負(fù)載是,機器人在其工作空間可以攜帶的最大負(fù)荷,例如3Kg到1300Kg不等。
如果你希望機器人完成將目標(biāo)工件從一個工位搬運到另一個工位,需要注意將工件的重量以及機器人手爪的重量加總到其工作負(fù)荷。
另外特別需要注意的是機器人的負(fù)載曲線,在空間范圍的不同距離位置,實際負(fù)載能力會有差異。
03 自由度(軸數(shù))
機器人配置的軸數(shù)直接關(guān)聯(lián)其自由度。如果是針對一個簡單的直來直去的場合,比如從一條皮帶線取放到另一條,簡單的4軸機器人就足以應(yīng)對。
但是,如果應(yīng)用場景在一個狹小的工作空間,且機器人手臂需要很多的扭曲和轉(zhuǎn)動,6軸或7軸機器人將是最好的選擇。
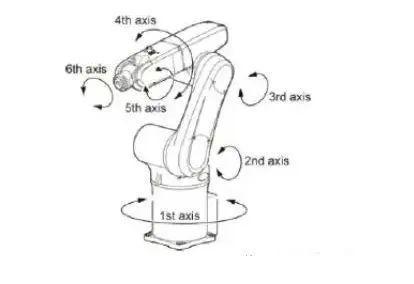
軸數(shù)一般取決于應(yīng)用場合。應(yīng)當(dāng)注意,在成本允許的前提下,選型多一點的軸數(shù)在靈活性方面不是問題。這樣方便后續(xù)重復(fù)利用改造機器人到另一個應(yīng)用制程,能適應(yīng)更多的工作任務(wù),而不是發(fā)現(xiàn)軸數(shù)不夠。
機器人制造商傾向于使用各自略有不同的軸或關(guān)節(jié)命名。基本上,第一關(guān)節(jié)(J1)是最接近機器人底座的那個。接下來的關(guān)節(jié)稱為J2,J3,J4和依此類推,直到到達(dá)手腕末端。而其他的Yaskawa/Motoman公司則使用字母命名他們機器人的軸。
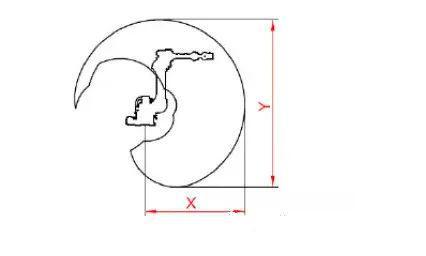
04 最大作動范圍
當(dāng)評估目標(biāo)應(yīng)用場合的時候,應(yīng)該了解機器人需要到達(dá)的最大距離。選擇一個機器人不是僅僅憑它的有效載荷,也需要綜合考量它到達(dá)的確切距離。每個公司都會給出相應(yīng)機器人的作動范圍圖,由此可以判斷,該機器人是否適合于特定的應(yīng)用。機器人的水平運動范圍,注意機器人在近身及后方的一片非工作區(qū)域。

機器人的最大垂直高度的量測是從機器人能到達(dá)的最低點(常在機器人底座以下)到手腕可以達(dá)到的的最大高度的距離(Y)。最大水平作動距離是從機器人底座中心到手腕可以水平達(dá)到的最遠(yuǎn)點的中心的距離(X)。
05 重復(fù)精度
同樣的,這個因素也還是取決于你的應(yīng)用場合。重復(fù)精度可以被描述為機器人完成例行的工作任務(wù)每一次到達(dá)同一位置的能力。
一般在±0.05mm到±0.02mm之間,甚至更精密。例如,如果需要你的機器人組裝一個電子線路板,你可能需要一個超級精密重復(fù)精度的機器人。如果應(yīng)用工序是比較粗糙,比如打包,碼垛等,工業(yè)機器人也就不需要那么精密。
另外一方面,組裝工程的機器人精度的選型要求,也關(guān)聯(lián)組裝工程各環(huán)節(jié)尺寸和公差的傳遞和計算,比如:來料物料的定位精度,工件本身的在治具中的重復(fù)定位精度等。這項指標(biāo)從2D方面以正負(fù) ± 表示。事實上,由于機器人的運動重復(fù)點不是線性的而是在空間3D運動,該參數(shù)的實際情況可以是在公差半徑內(nèi)的球形空間內(nèi)任何位置。
當(dāng)然,配合現(xiàn)在的機器視覺技術(shù)的運動補償,將減低機器人對于來料精度的要求和依賴,提升整體的組裝精度。
06 速度
這個參數(shù)與每一個用戶息息相關(guān)。事實上,它取決于在該作業(yè)需要完成的Cycle Time。規(guī)格表列明了該型號機器人最大速度,但我們應(yīng)該知道,考量從一個點到另一個點的加減速,實際運行的速度將在0和最大速度之間,這項參數(shù)單位通常以度/秒計,有的機器人制造商也會標(biāo)注機器人的最大加速度。
07 本體重量
機器人本體重量是設(shè)計機器人單元時的一個重要因素。如果工業(yè)機器人必須安裝在一個定制的機臺,甚至在導(dǎo)軌上,你可能需要知道它的重量來設(shè)計相應(yīng)的支撐。
08 剎車和轉(zhuǎn)動慣量
基本上每個機器人制造商提供他們的機器人制動系統(tǒng)的信息。有些機器人對所有的軸配備剎車,其他的機器人型號不是所有的軸都配置剎車。要在工作區(qū)中確保精確和可重復(fù)的位置,需要有足夠數(shù)量的剎車。另外一種特別情況,意外斷電發(fā)生的時候,不帶剎車的負(fù)重機器人軸不會鎖死,有造成意外的風(fēng)險。
同時,某些機器人制造商也提供機器人的轉(zhuǎn)動慣量。其實,對于設(shè)計的安全性來說,這將是一個額外的保障。你可能還注意到不同軸上的適用的扭矩。例如,如果你的動作需要一定量的扭矩以正確完成工作,你需要檢查,在該軸上適用的最大扭矩是否正確的。如果選型不正確,機器人則可能由于過載而Down機。
09 防護(hù)等級
根據(jù)機器人的使用環(huán)境,選擇達(dá)到一定的防護(hù)等級(IP等級)的標(biāo)準(zhǔn)。一些制造商提供相同的機械手針對不同的場合不同的IP防護(hù)等級的產(chǎn)品系列。如果機器人在與生產(chǎn)食品相關(guān)的產(chǎn)品,醫(yī)藥、醫(yī)療器具,或易燃易爆的環(huán)境中工作時,IP等級會有所不同。一般如,標(biāo)準(zhǔn):IP40,油霧:IP67,清潔ISO等級:3。
相關(guān)新聞
- ? 多元場景下,中國工業(yè)機器人走出差異化 AI 路徑
- ? 利潤同比暴增232.35%,工業(yè)機器人企業(yè)2025三季度業(yè)績出爐!
- ? 我國工業(yè)機器人系統(tǒng)集成市場潛力巨大,發(fā)展空間廣闊
- ? 數(shù)據(jù)顯示,我國制造業(yè)機器人密度已達(dá)470臺/萬人
- ? 工信部:“十四五”以來我國工業(yè)機器人新增裝機量占全球比重超50%
- ? 2025工業(yè)機器人廠商上半年業(yè)績一覽,工業(yè)機器人整體市場回暖,預(yù)計全年可實現(xiàn)兩位數(shù)增長
- ? 工業(yè)機器人“排位戰(zhàn)”再升級,2025年上半年 TOP10廠商市占率達(dá)近65%
- ? 海爾系斥資超12億元鞏固控制權(quán) 新時達(dá)背靠“大樹”謀扭虧
- ? 全球工業(yè)機器人市場遇冷,中國逆勢增長成亮點
- ? 中國機械工業(yè)聯(lián)合會:上半年我國工業(yè)機器人產(chǎn)量同比增長35.6%
編輯精選
- ? 東土科技連投三家核心企業(yè) 發(fā)力具身機器人領(lǐng)域
- ? 第七屆工業(yè)互聯(lián)網(wǎng)大賽在京正式啟動
- ? 珞石機器人沖刺港交所主板上市
- ? 9月RatingDog中國制造業(yè)PMI升至51.2,延續(xù)擴張態(tài)勢
- ? ABB與軟銀簽約擬出售機器人業(yè)務(wù)
- ? 全球工廠機器人需求十年翻番——國際機器人聯(lián)合會發(fā)布《2025年世界機器人報告》
- ? 2025年度綠色工廠推薦工作啟動
- ? 羅克韋爾自動化重磅推出 ControlLogix 5590 控制器,引領(lǐng)工控新時代
- ? 華為系公司賽力斯與字節(jié)合作具身智能,問界要開發(fā)人形機器人?
- ? 40.5萬億元工業(yè)增加值 工業(yè)家底更厚實
工控原創(chuàng)
- ? 十月工控領(lǐng)域重要資訊,一睹為快!
- ? 回顧 | 以技術(shù)干貨 + 落地案例,解鎖產(chǎn)業(yè)升級新路徑
- ? ABB報告:工業(yè)停機每小時損失高達(dá)50萬美元,知行鴻溝阻礙現(xiàn)代化更新
- ? ABB宣布以53.75億美元將機器人業(yè)務(wù)出售給軟銀
- ? 九月不容錯過的工控圈大事
- ? 當(dāng)“軟件定義”與“價值鏈”相遇,未來工業(yè)走向何方?
- ? 西門子:以“一次正確”破局內(nèi)卷,讓工業(yè)AI真正落地
- ? “四大家族”“四小龍”齊聚,工博會機器人展的亮點都在這了!
- ? 2025工博會開幕,工業(yè)AI釋放創(chuàng)新潛力
- ? 繁易的戰(zhàn)略進(jìn)擊:從HMI到PLC,走向全棧式自動化融合創(chuàng)新


