
精確時(shí)間同步協(xié)議(PTP)——輕松實(shí)現(xiàn)多相機(jī)的精確同步
http://www.kblhh.cn 2022-05-17 10:23 來(lái)源:
在某些應(yīng)用場(chǎng)合中,如果需要處理來(lái)自多臺(tái)相機(jī)的圖像時(shí),則圖像記錄的精確時(shí)間或準(zhǔn)確的先后順序?qū)罄m(xù)處理至關(guān)重要。若相機(jī)能夠提供時(shí)間戳,則可為不同的圖像數(shù)據(jù)建立時(shí)間基準(zhǔn)。然而,相機(jī)的時(shí)間基準(zhǔn)要能夠精確匹配,這一點(diǎn)至關(guān)重要。通過(guò)使用“精確時(shí)間協(xié)議”(PTP),HK IDS GigE Vision相機(jī)(固件版本2.2或以上)能夠輕松實(shí)現(xiàn)同步。
借助精確時(shí)間協(xié)議(PTP)同步HK IDS GigE Vision相機(jī)
精確時(shí)間協(xié)議(PTP)是一種時(shí)間同步標(biāo)準(zhǔn)(IEEE1588),它使通過(guò)網(wǎng)絡(luò)連接的設(shè)備實(shí)現(xiàn)時(shí)間同步。支持此標(biāo)準(zhǔn)的相機(jī)可在特定的周期內(nèi)與主時(shí)鐘交換同步信息。利用各自發(fā)送和接收時(shí)間中的時(shí)間戳信息,相機(jī)內(nèi)部的計(jì)數(shù)器可實(shí)現(xiàn)精確地校準(zhǔn)和同步。
所有固件版本為2.2及以上的HK IDS GigE Vision相機(jī)都可與PTP兼容!
IEEE1588時(shí)間戳是以1970年1月1日0時(shí)0分為計(jì)時(shí)起點(diǎn),支持1納秒(1 GHz)的時(shí)間分辨率。然而,由于延遲和信號(hào)運(yùn)行時(shí)的不準(zhǔn)確性,聯(lián)網(wǎng)設(shè)備的時(shí)間同步精度達(dá)微秒級(jí)。
PTP應(yīng)用案例
PTP作為一種基礎(chǔ)協(xié)議,通過(guò)為圖像數(shù)據(jù)提供時(shí)間基準(zhǔn),為各種應(yīng)用奠定基礎(chǔ)。視應(yīng)用要求及網(wǎng)絡(luò)基礎(chǔ)設(shè)施的復(fù)雜性的不同,PTP可以通過(guò)不同的方式來(lái)實(shí)現(xiàn)。
01 相對(duì)時(shí)間戳同步
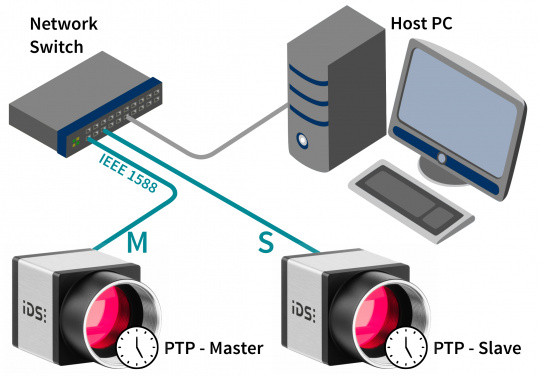
在本案例中,所有相機(jī)都在同一個(gè)網(wǎng)絡(luò)。其中一臺(tái)相機(jī)為主服務(wù)器,其余相機(jī)為從服務(wù)器。所有從相機(jī)的時(shí)間戳與主相機(jī)同步。相機(jī)既不提供絕對(duì)時(shí)間戳(實(shí)時(shí)),同時(shí)在無(wú)其他操作的情況下,也無(wú)法實(shí)現(xiàn)同步觸發(fā)。
優(yōu)勢(shì):
■ 在該應(yīng)用場(chǎng)合中,相對(duì)時(shí)間戳確定所有相機(jī)圖像記錄的時(shí)間分配。此外,相對(duì)時(shí)間戳還能確定哪一張圖像為第一張,以及不同相機(jī)的圖像時(shí)差大小。
■ 無(wú)需額外的操作和成本,即可為特定的網(wǎng)絡(luò)基礎(chǔ)架構(gòu)生成相對(duì)時(shí)間戳。
02 利用絕對(duì)時(shí)間同步時(shí)間戳
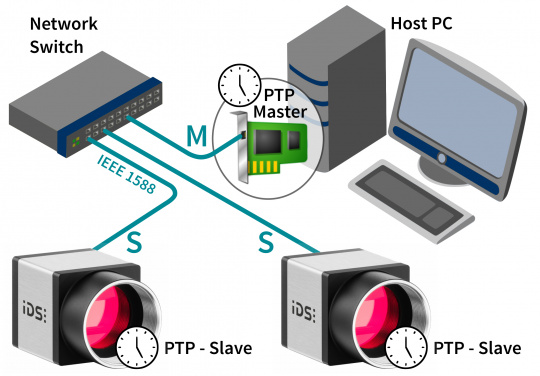
本案例中,聯(lián)網(wǎng)相機(jī)與外部主時(shí)鐘同步。該P(yáng)TP主時(shí)鐘可以是支持“硬件時(shí)間戳”的網(wǎng)卡——若無(wú)硬件支持,同步精度將顯著降低。除必要的硬件外,還需要支持PTP的軟件。
優(yōu)勢(shì):
■ 具備全局(實(shí)時(shí))時(shí)間戳的圖像內(nèi)容可跨越當(dāng)前的應(yīng)用限制,與任何其他使用實(shí)時(shí)時(shí)間基準(zhǔn)的信息相關(guān)聯(lián)。
■ 對(duì)于其它使用全局時(shí)間基準(zhǔn)的應(yīng)用場(chǎng)合或評(píng)估,圖像內(nèi)容可以重用。
使用PTP:“相對(duì)同步”
硬件設(shè)置
兩臺(tái)不同的固件版本為2.2(支持PTP)的HK IDS GigE Vision相機(jī)(GV-526xFA-C和GV-504xCP-M)連至同一網(wǎng)絡(luò)交換機(jī)。一臺(tái)額外的主機(jī)PC,僅用于控制和配置相機(jī),不涉及相機(jī)的PTP同步。
軟件設(shè)置
可通過(guò)“PtpControl”下的相機(jī)功能節(jié)點(diǎn)圖查找所有PTP配置功能。只有固件需為2.2或以上版本的相機(jī)才能使用這些功能。我們?cè)谥鳈C(jī)PC上安裝配套軟件,來(lái)設(shè)置PTP同步。
將一臺(tái)相機(jī)配置為PTP主時(shí)鐘
GV-526xFA-C相機(jī)應(yīng)設(shè)置為PTP主時(shí)鐘。在軟件中打開(kāi)相機(jī),并將“PtpEnable”設(shè)為“True”,啟用PTP。另外,將“PtpSlaveOnly”設(shè)為“False”為相機(jī)賦予“主時(shí)鐘”角色。
# Configure master camera
PtpEnable = True
PtpSlaveOnly = False
將另一臺(tái)相機(jī)配置為PTP從時(shí)鐘
GV-504xCP-M相機(jī)應(yīng)設(shè)為PTP從時(shí)鐘。同理,將“PtpEnable”設(shè)為“True”以啟用PTP。此時(shí),這臺(tái)相機(jī)僅作為從時(shí)鐘使用。將“PtpSlaveOnly”仍設(shè)為“True”。
# Configure slave camera
PtpEnable = True
PtpSlaveOnly = True
創(chuàng)建主從等級(jí)
在完成主從時(shí)鐘配置后,主-從等級(jí)將自動(dòng)創(chuàng)建。對(duì)于主時(shí)鐘相機(jī),可通過(guò)“PtpStatus”由“Listening ”變成“Master”來(lái)確定。對(duì)于從時(shí)鐘相機(jī),可通過(guò)“PtpStatus”先由“Listening”變?yōu)?ldquo;Uncalibrated”,并在與主時(shí)鐘相機(jī)同步后變?yōu)?ldquo;Slave”來(lái)確定。
在通過(guò)相機(jī)的新PTP功能完成主從等級(jí)創(chuàng)建后,“相對(duì)同步”也隨之完成。
啟用時(shí)間戳
如果您希望對(duì)圖像數(shù)據(jù)使用已同步相機(jī)生成的時(shí)間戳,則必須將時(shí)間戳作為元數(shù)據(jù),啟用元數(shù)據(jù)(及塊數(shù)據(jù))傳輸。
首先,將“ChunkModeActive”設(shè)為“True”,以通過(guò)圖像緩沖區(qū)啟用塊數(shù)據(jù)傳輸。然后,通過(guò)“ChunkSelector”選擇“Timestamp”,并通過(guò)“ChunkEnable”開(kāi)關(guān)啟用時(shí)間戳。
# activate chunk data creation
ChunkModeActive = True
# enable "ChunkTimestamp"
ChunkSelector = Timestamp
ChunkEnable = True
這時(shí),相機(jī)所采集的每一張圖像將具備相應(yīng)的時(shí)間戳,并借助圖像緩沖區(qū)(通過(guò)塊數(shù)據(jù))傳輸至主機(jī)PC。這樣,塊數(shù)據(jù)及時(shí)間戳可通過(guò)任何視覺(jué)標(biāo)準(zhǔn)軟件進(jìn)行讀取。
圖像采集
如果應(yīng)用中需要對(duì)帶時(shí)間戳的圖像數(shù)據(jù)進(jìn)行處理,則圖像的記錄時(shí)間和相機(jī)的觸發(fā)至關(guān)重要。這種情況取決于來(lái)自多臺(tái)相機(jī)的圖像是否需要完全相同的采集時(shí)間(同步圖像采集)以及時(shí)間關(guān)聯(lián)偏差(時(shí)間戳抖動(dòng))有多大。根據(jù)應(yīng)用要求,須選擇適合相機(jī)的觸發(fā)模式。在做出這一選擇時(shí),要考慮的決定性的因素不僅包括不同軟件和硬件信號(hào)模式的精度,也包括部署和使用所需操作和成本。為檢查先前配置的“相對(duì)同步”,我們使用每秒脈沖數(shù)(PPS)信號(hào)來(lái)觸發(fā)相機(jī),以實(shí)現(xiàn)同步自由運(yùn)行。
同步自由運(yùn)行
顧名思義,在PTP功能啟用的情況下,每臺(tái)相機(jī)(主時(shí)鐘相機(jī)和從時(shí)鐘相機(jī))的PPS信號(hào)會(huì)每秒生成一個(gè)。因此我們可借助PPS信號(hào)檢查相機(jī)的同步狀態(tài)。這一信號(hào)被設(shè)置為觸發(fā)源,因此每秒鐘將觸發(fā)一次圖像采集。除了由“相對(duì)同步”導(dǎo)致的幾微妙的偏差,相機(jī)生成的圖像時(shí)間戳應(yīng)為一致。通過(guò)PPS信號(hào)實(shí)現(xiàn)所有相機(jī)同步自由運(yùn)行的操作如下:
# image acquisition configuration for both cameras
LineSelector = Line2
LineMode = Output
LineSource = PPS
TriggerSelector = ExposureStart
TriggerMode = On
TriggerSource = Line2
# Limit bandwidth on both cameras
DeviceLinkThroughputLimit = 60000000
# Start acquisition on both cameras
Execute AcquisitionStart
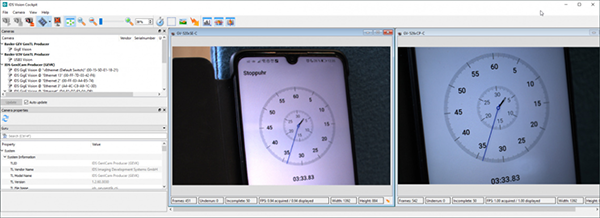
同步PPS觸發(fā)信號(hào)將觸發(fā)相機(jī)在同一時(shí)間點(diǎn)進(jìn)行圖像采集
讀取時(shí)間戳
為在應(yīng)用場(chǎng)合中處理時(shí)間戳和圖像內(nèi)容,您須讀取當(dāng)前圖像緩沖區(qū)的塊數(shù)據(jù)。塊數(shù)據(jù)為制造商相關(guān)的有效負(fù)載緩沖區(qū),其存儲(chǔ)布局通常未知,因此我們將通過(guò)節(jié)點(diǎn)圖來(lái)讀取各個(gè)元數(shù)據(jù)。為此,所有現(xiàn)有的元數(shù)據(jù)及其標(biāo)準(zhǔn)的節(jié)點(diǎn)名稱將從GenTL傳輸至節(jié)點(diǎn)圖,以便通過(guò)標(biāo)準(zhǔn)的API進(jìn)行訪問(wèn)。
以下的源代碼片段為您演示如何從圖像緩沖區(qū)中提取時(shí)間戳。安裝包也為您提供了有關(guān)塊數(shù)據(jù)處理的完整源代碼示例。
// Get buffer from device's datastream
const auto buffer = m_dataStream->WaitForFinishedBuffer(5000);
// check buffer for chunks
if (buffer->HasChunks())
{
// update nodemap with current chunk data
m_nodemapRemoteDevice->UpdateChunkNodes(buffer);
// Get the value of the timestamp chunk
const auto chunktimestamp = m_nodemapRemoteDevice->FindNode<peak::core::nodes::FloatNode>("ChunkTimestamp")->Value();
}
總結(jié)
當(dāng)涉及圖像內(nèi)容的時(shí)間分配時(shí),PTP是多相機(jī)應(yīng)用場(chǎng)合中一個(gè)重要的基礎(chǔ)功能,能夠輕松實(shí)現(xiàn)相機(jī)間的相對(duì)同步,無(wú)需額外的硬件和軟件支持。在許多應(yīng)用場(chǎng)合中,相對(duì)相機(jī)同步也足以確保圖像在“相同”的時(shí)間或以正確的順序使用。相機(jī)還配備外部定時(shí)器,適用于全局同步。
相關(guān)新聞
- ? 機(jī)器視覺(jué)在機(jī)器人行業(yè)的應(yīng)用(下)
- ? 【行業(yè)解決方案】OPT多合一產(chǎn)品組合,賦能“物流自動(dòng)分揀”提質(zhì)增效
- ? 獅頭股份擬溢價(jià)296%收購(gòu)利珀科技97%股份 切入機(jī)器視覺(jué)領(lǐng)域
- ? 機(jī)器視覺(jué)在機(jī)器人行業(yè)的應(yīng)用(上)
- ? VisionChina2026(上海)機(jī)器視覺(jué)展煥新登場(chǎng),報(bào)名搶占黃金展位!
- ? 大華股份擬分拆華睿科技赴港上市 專注機(jī)器視覺(jué)領(lǐng)域
- ? 共拓智造新視界 | OPT(奧普特)2025全球生態(tài)伙伴大會(huì)-東莞站圓滿召開(kāi)!
- ? 2025中國(guó)機(jī)器視覺(jué)產(chǎn)業(yè)鏈解析
- ? 易思維沖刺科創(chuàng)板IPO:業(yè)績(jī)?cè)鏊俜啪彛暝?億研發(fā)費(fèi)用
- ? OPT(奧普特)完成對(duì)東莞泰萊控股收購(gòu),深化“視覺(jué)·傳感·運(yùn)控+AI”全技術(shù)協(xié)同生態(tài)閉環(huán)
編輯精選
- ? 東土科技連投三家核心企業(yè) 發(fā)力具身機(jī)器人領(lǐng)域
- ? 第七屆工業(yè)互聯(lián)網(wǎng)大賽在京正式啟動(dòng)
- ? 珞石機(jī)器人沖刺港交所主板上市
- ? 9月RatingDog中國(guó)制造業(yè)PMI升至51.2,延續(xù)擴(kuò)張態(tài)勢(shì)
- ? ABB與軟銀簽約擬出售機(jī)器人業(yè)務(wù)
- ? 全球工廠機(jī)器人需求十年翻番——國(guó)際機(jī)器人聯(lián)合會(huì)發(fā)布《2025年世界機(jī)器人報(bào)告》
- ? 2025年度綠色工廠推薦工作啟動(dòng)
- ? 羅克韋爾自動(dòng)化重磅推出 ControlLogix 5590 控制器,引領(lǐng)工控新時(shí)代
- ? 華為系公司賽力斯與字節(jié)合作具身智能,問(wèn)界要開(kāi)發(fā)人形機(jī)器人?
- ? 40.5萬(wàn)億元工業(yè)增加值 工業(yè)家底更厚實(shí)
工控原創(chuàng)
- ? 十月工控領(lǐng)域重要資訊,一睹為快!
- ? 回顧 | 以技術(shù)干貨 + 落地案例,解鎖產(chǎn)業(yè)升級(jí)新路徑
- ? ABB報(bào)告:工業(yè)停機(jī)每小時(shí)損失高達(dá)50萬(wàn)美元,知行鴻溝阻礙現(xiàn)代化更新
- ? ABB宣布以53.75億美元將機(jī)器人業(yè)務(wù)出售給軟銀
- ? 九月不容錯(cuò)過(guò)的工控圈大事
- ? 當(dāng)“軟件定義”與“價(jià)值鏈”相遇,未來(lái)工業(yè)走向何方?
- ? 西門(mén)子:以“一次正確”破局內(nèi)卷,讓工業(yè)AI真正落地
- ? “四大家族”“四小龍”齊聚,工博會(huì)機(jī)器人展的亮點(diǎn)都在這了!
- ? 2025工博會(huì)開(kāi)幕,工業(yè)AI釋放創(chuàng)新潛力
- ? 繁易的戰(zhàn)略進(jìn)擊:從HMI到PLC,走向全棧式自動(dòng)化融合創(chuàng)新


