
“一芯四用”,米爾RK3576如何同時駕馭4路YOLOv8視頻流?
http://www.kblhh.cn 2025-09-11 17:09 來源:米爾電子
在科技飛速發展的當下,人工智能與邊緣計算的融合正以前所未有的速度重塑著我們的生活。RK3576芯片擁有4核Cortex-A72以及4核Cortex-A53提供基礎算力,6TOPS算力NPU來模型推導運算。使用YOLOv8模型時也是手到擒來,接下來隨著步伐看看它表現如何。
圖:此次的板卡米爾RK3576核心板開發板
YOLO簡介
YOLO(You Only Look Once)是當前業界領先的實時目標檢測算法系列,以其速度和精度的完美平衡而聞名。從它發布至今,經歷了好幾個版本變革,下圖是它發展歷史。
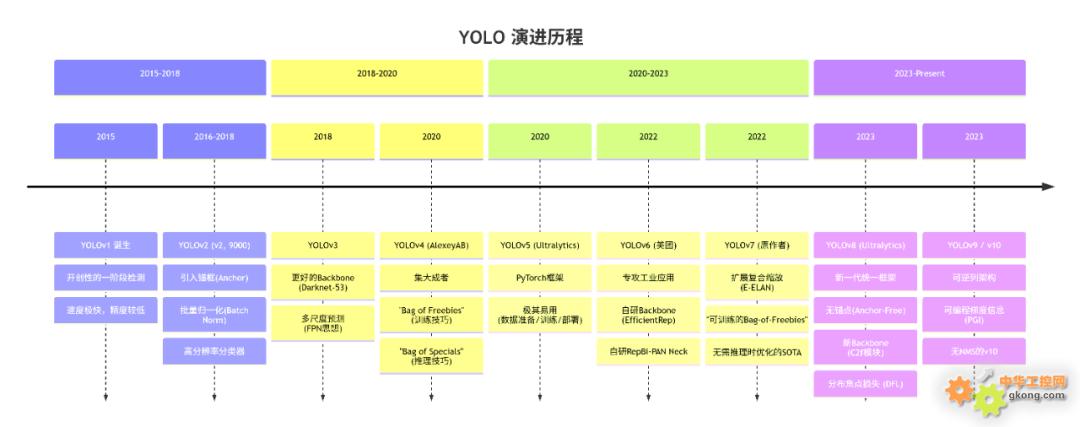
圖1-1. YOLO版本發展史
YOLOv8在性能、易用性、架構現代性和生態之間取得了最佳的平衡,它是目前最全面,最省心選擇。
同樣YOLOv8也有很多尾綴,用一個表簡單列一下它們分別代表什么意思:
表1-1.按任務類型區分
|
后綴 |
全稱 |
任務 |
輸出 |
典型應用 |
|
-det |
Detection |
目標檢測 |
邊界框 (BBox)+類別和置信度 |
找出圖像中所有感興趣的物體并用框標出。如:行人檢測、車輛檢測、安全帽檢測。 |
|
-seg |
Segmentation |
實例分割 |
邊界框+類別+像素級掩膜 (Mask) |
在目標檢測的基礎上,進一步勾勒出物體的精確輪廓。如:摳圖、自動駕駛中識別道路和車輛形狀。 |
|
-pose |
Pose |
關鍵點檢測 |
邊界框+人體關鍵點(17個點) |
檢測人體的關鍵骨骼點。如:動作識別、健身姿態分析、人機交互。 |
|
-cls |
Classification |
圖像分類 |
整個圖像的類別標簽 |
判斷一張圖片屬于哪個類別。如:貓狗分類、圖像質量評估。 |
|
-obb |
Oriented Bounding Boxes |
旋轉目標檢測 |
旋轉邊界框(BBox+角度θ)+類別和置信度 |
檢測帶有角度的物體,其邊界框不是水平的。 |
表1-2.按模型尺寸分
|
前綴 |
含義 |
特點 |
適用場景 |
|
n |
Nano |
極小的模型,速度最快,精度最低 |
移動端、嵌入式設備(如 Jetson Nano)、CPU實時推理 |
|
s |
Small |
小模型,速度和精度平衡 |
最常用的起點,適合大多數需要實時性的場景(如視頻流分析) |
|
m |
Medium |
中等模型,精度和速度的最佳權衡 |
對精度有較高要求,且仍有不錯的速度 |
|
l |
Large |
大模型,精度高,速度較慢 |
服務器端應用,其中精度比速度更重要 |
|
x |
X-Large |
超大模型,精度最高,速度最慢 |
學術研究、刷榜、對精度有極致要求的離線分析 |
米爾Demo模型選擇
基于MYD-LR3576來說,選擇s/n小模型相對合適,使用基礎功能和-seg,-obb,-pos來演示。
單獨測試視頻場景效果展示
1.YOLOv8s.int 目標檢測模型

2.YOLOv8s-seg.int 實例分割模型

3.YOLOv8s-pose.int 人體姿態估計模型

4.YOLOv8s-obb.float 旋轉目標檢測模型

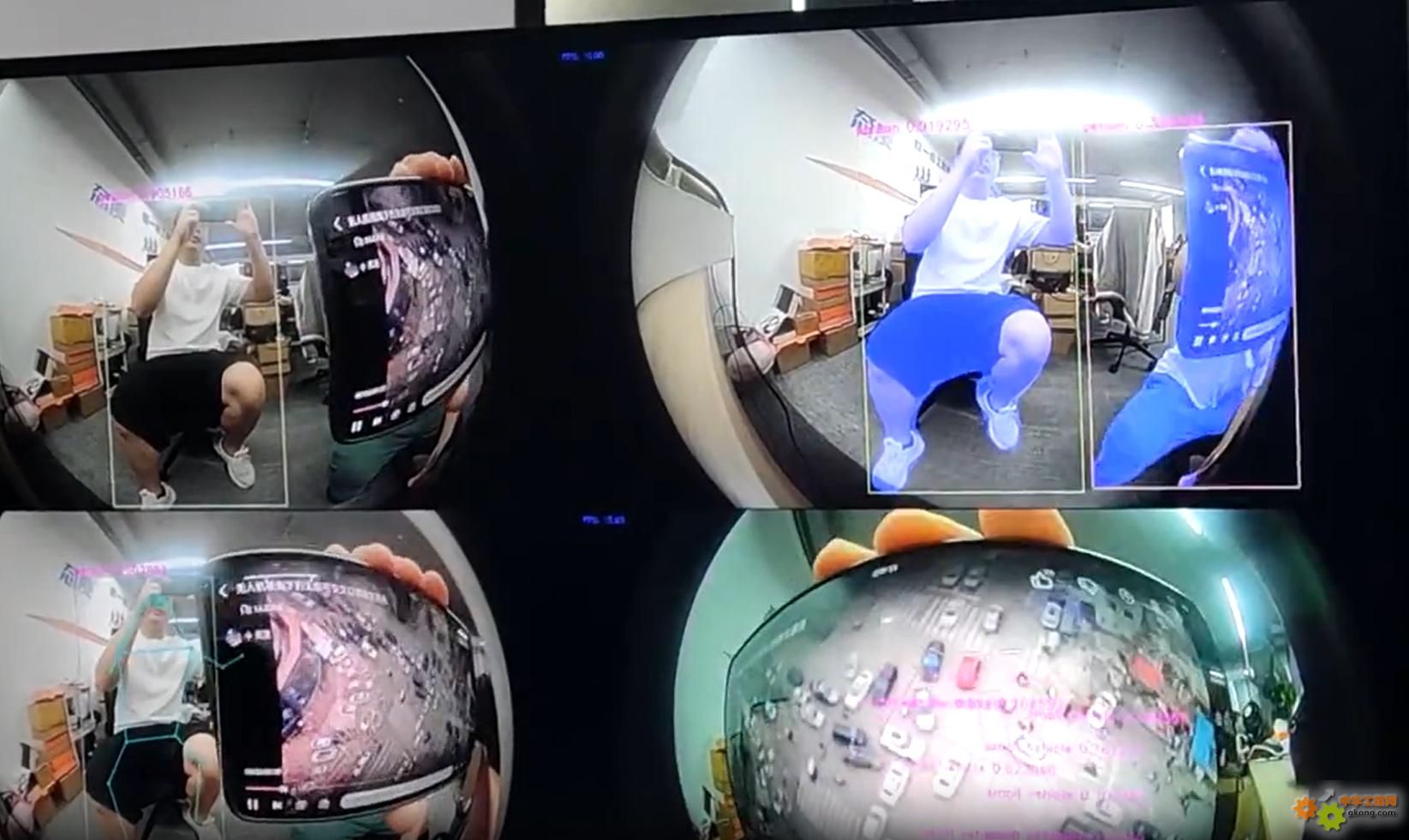
上面已經看到了單獨解析視頻時,每一種模型效果,接下來演示MYD-LR3576通過4路攝像頭同時推導效果。
實現方式如下:
MYD-LR3576擁有3路MIPI-CSI接口,通過3個MY-CAM004M分別接入3路MIPI-CSI,采用2+1+1方式搭載4路AHD高清攝像頭,攝像頭采集的畫面輸出為H.264編碼的RTSP碼流,1920*1080分辨率,30幀。經過MYD-LR3576開發板處理后,單路視頻輸出1920*1080,25fps,4路視頻加起來在60~70幀,cpu占用率接近100%,NPU綜合利用率在50~60%。
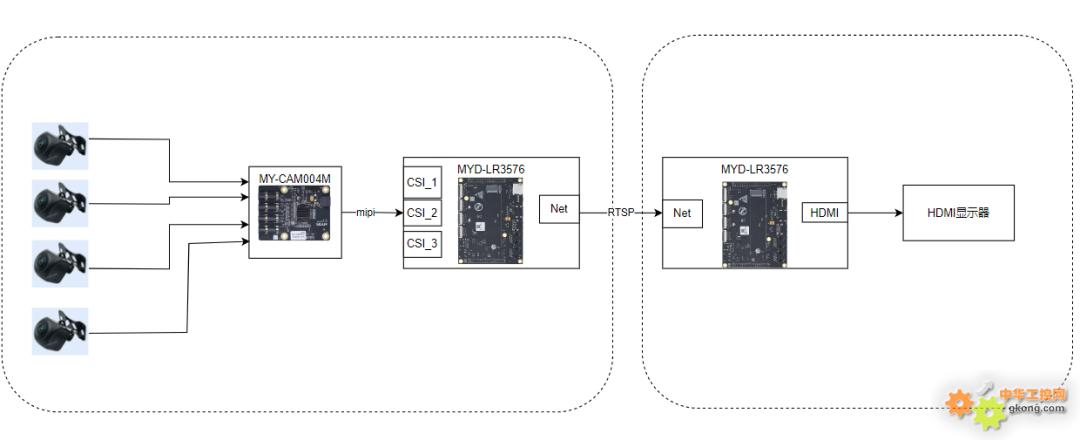
圖1-2. 實物接線概要圖
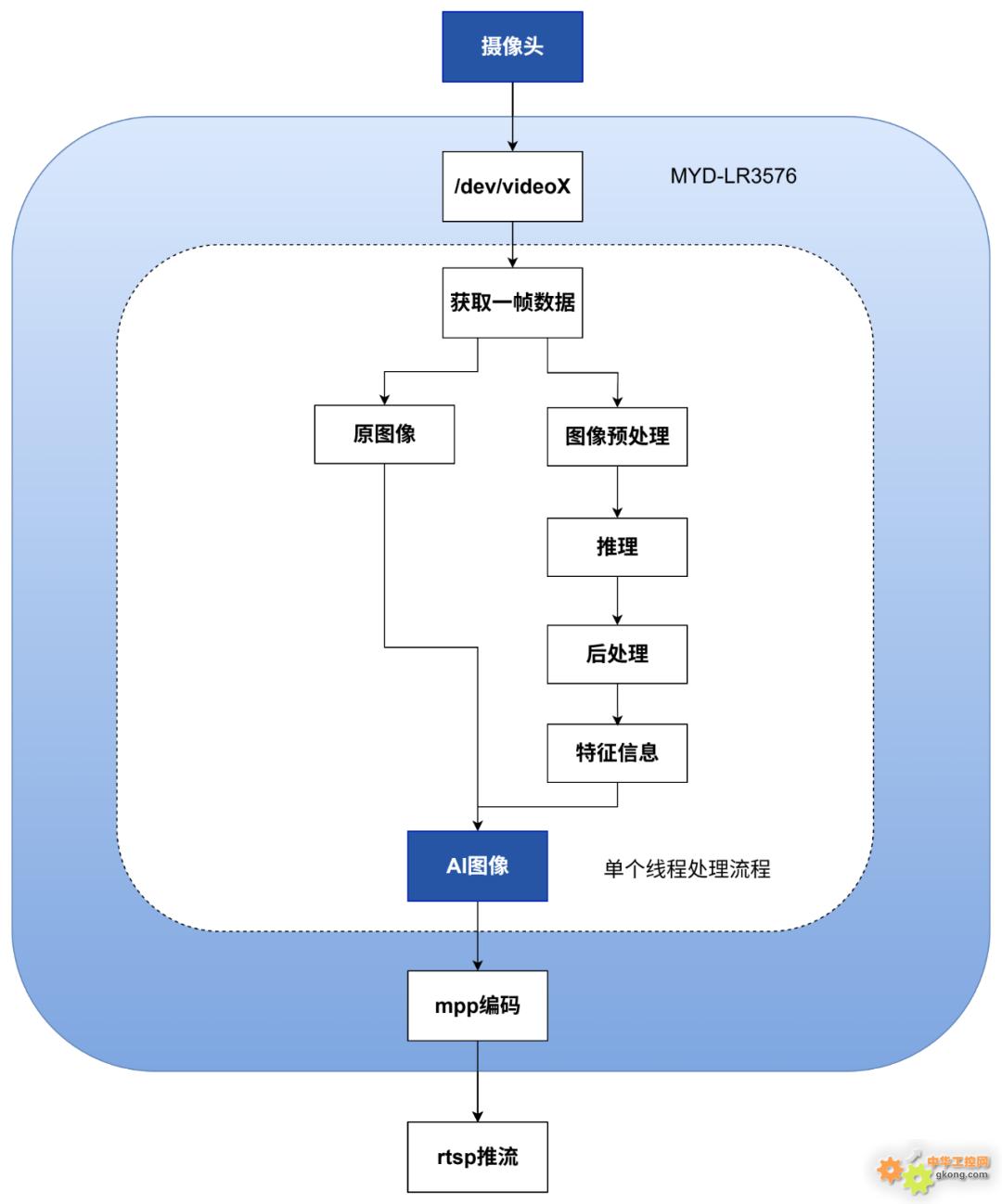
圖1-3. 攝像頭數據處理流程圖
MYIR在程序中做了哪些優化
AI推導一輪流程
- 獲取CSI一幀數據
- 裁剪數據到xxx*yyy較小圖片
- 調用RKNN api處理
- 獲取返回特征位置和相似度
- 對應放大到原始圖片
- 增加方框和相似度值到原圖
這樣做后果是CPU利用率不高,視頻采集幀數低,最后顯示效果會卡頓。
米爾采用線程池方案,將上述過程通過線程處理,充分利用4個A72和4個A53資源,同時采用RGA來做圖片裁剪和放大。將CPU,GPU,NPU,VPU4個模塊協同工作,資源最大限度開發使用。
總結:
RK3576 在 YOLOv8 模型表現上十分亮眼,它的應用場景涉及到很多領域。例如智能安防,在公共場所,如機場、火車站、商場等,部署的安防監控系統,快速準確地識別出人群中的異常行為,如打架斗毆、奔跑逃竄等,并及時發出警報,同時,通過人臉識別技術,系統可以對進入場所的人員進行身份識別,與數據庫中的信息進行比對,實現對重點人員的監控和追蹤。又或者搭載智能機器人賦予迅速反饋。
更多MYD-LR3576創新應用,敬請期待。
相關新聞
- ? 米爾SECC方案助力國標充電樁出海
- ? 米爾RK3576邊緣計算盒精準驅動菜品識別模型性能強悍
- ? 米爾與安路聯合亮相VisionChina 2025,共推FPGA視覺方案
- ? 經典再進化:米爾ZYNQ 7010/7020全面適配2024.2工具鏈
- ? 經典再進化:米爾ZYNQ 7010/7020全面適配2024.2工具鏈
- ? 從微秒級響應到確定性延遲:深入解析米爾全志T536核心板的實時性技術突破
- ? 米爾電子獲全志科技生態認證,共推工業智能化升級
- ? 如何移植EtherCAT Igh--基于米爾RK3576開發板
- ? 追加!30套FPGA開發板免費送!米爾-安路飛龍派創意秀活動再開啟
- ? 6TOPS算力驅動30億參數LLM,米爾RK3576部署端側多模態多輪對話
編輯精選


