|
ę╗ĪóŽĄĮy(t©»ng)▒│Š░Ż║
ļSų°╔ńĢ■Ą─▀M▓ĮŻ¼ė├╣ż╗─Īó╚╦╣ż│╔▒Šų─Ļį÷╝ėĄ─ŪķørŽ┬Ż¼AGVųŪ─▄ūįäė╗»ąĪ▄ć╩Ū╠µ┤·╚╦╣ż╔·«a(ch©Żn)Ą─ę╗ĘNĘĮ╩ĮŻ¼ęčųØu▒╗įĮüĒįĮČÓĄ─Ų¾śI(y©©)╦∙└¹ė├ĪŻAGVųŪ─▄ąĪ▄ć (Automated Guided VehicleŻ¼║åĘQAGV)Ż¼ųĖčbéõėąļŖ┤┼╗“╣ŌīWĄ╚ūįäėī¦ę²čbų├Ż¼─▄ē“čžęÄ(gu©®)Č©Ą─ī¦ę²┬ĘÅĮąą±éŻ¼Š▀ėą░▓╚½▒Żūoęį╝░Ė„ĘNęŲ▌d╣”─▄Ą─▀\▌ö▄ćŻ¼╣żśI(y©©)æ¬(y©®ng)ė├ųą▓╗ąĶ±{ ±éåTĄ─░ß▀\▄ćŻ¼ęį┐╔│õļŖų«ąŅļŖ│ž×ķŲõäė┴”üĒį┤ĪŻ
AGVųŪ─▄ūįäė╗»ąĪ▄ćÅVĘ║▒╗Ų¾śI(y©©)╦∙ę²ė├Ż¼įĮüĒįĮČÓĄ─AGVąĪ▄ćū▀Ž“╔·«a(ch©Żn)▄ćķgŻ¼─Ū├┤AGVąĪ▄ć┼cų„┐ž╩ęĄ─═©ėŹīó╩Ū─┐Ū░ūŅ┤¾Ą─å¢Ņ}ĪŻ│ŻęÄ(gu©®)ĘĮĘ©╩ŪĖ„ąĪ▄ć═©▀^ę╗Śl ļŖ└|ŠĆ▀BĮėąĪ▄ć┼c┐žųŲ╩ęų«ķgĄ─öĄ(sh©┤)ō■(j©┤)Į╗ōQŻ¼Ą½▄ćķgĄ─ąĪ▄ćįĮüĒįĮČÓŻ¼Ė„ąĪ▄ćĄ─ąą±éĘĮŽ“▓╗ę╗ų┬Ż¼▀BĮėļŖ└|Š═╚▌ęū╝m└pį┌ę╗ŲŻ¼ė░Ēæ┴╦Ų¾śI(y©©)Ą─╔·«a(ch©Żn)ą¦┬╩ĪŻ╔Ņ█┌╩ą║Ż═©▀_ ļŖūė┐Ų╝╝ėąŽ▐╣½╦Šßśī”▒ŖČÓAGV╔·«a(ch©Żn)ąĪ▄ćĄ─ąĶŪ¾║═ūŅĮKė├æ¶╩╣ė├ėąŠĆ┐žųŲąĪ▄ćĦüĒĄ─¤®É└Ż¼╠ž═Ų│÷HTD-WDŽĄ┴ą¤oŠĆķ_ĻP(gu©Īn)┴┐▌ö╚ļ▌ö│÷─ŻēKį┌AGVųŪ─▄ūį äė╗»ąĪ▄ć╣żśI(y©©)¤oŠĆ┐žųŲŽĄĮy(t©»ng)ĮŌøQĘĮ░ĖŻ¼×ķAGVųŪ─▄ąĪ▄ć╔·«a(ch©Żn)Ų¾śI(y©©)╠ß╣®╗∙ė┌╣żśI(y©©)¤oŠĆĄ─┐žųŲĘĮ╩ĮŻ¼×ķūŅĮKė├æ¶īŹ¼F(xi©żn)ėąŠĆĖ─įņ│╔¤oŠĆĄ─┐žųŲĘĮ░ĖĪŻ
Č■ĪóŽĄĮy(t©»ng)ę¬Ū¾Ż║
AGVųŪ─▄ūįäė╗»┐žųŲąĪ▄接Įy(t©»ng)ę¬Ū¾Ż¼ė├æ¶ąĶę¬┐žųŲAGVąĪ▄ćĄ─ĘĮŽ“Īó╦┘Č╚ĪóąĪ▄ćį┌šŠ³cĄ─åó═ŻĄ╚Ż¼ę¬▀mĢrī”AGVąĪ▄ćĄ─▀\ąąĀŅæB(t©żi)▀Mąą▀B└m(x©┤)Ą─ĀŅæB(t©żi)▒O(ji©Īn)£yŻ¼▒O(ji©Īn)£yģó öĄ(sh©┤)░³└©ĘĮŽ“Īó╦┘Č╚Īó╬╗ų├Īó▀\ąąĀŅørĄ╚ģóöĄ(sh©┤)▀Mąą▓╔╝»é„▌ö▓ó▀Mąą▀m«ö?sh©┤)─┐žųŲĪŻ«öųąčļ┐žųŲ╩ęąĶę¬ī”ö?sh©┤)ō■(j©┤)▀MąąĘų╬÷ęį╝░įĮĮńĀŅæB(t©żi)ė|░l(f©Ī)ł¾Š»ĢrŻ¼▒žąĶ─▄ē“└¹ė├▀@ą®öĄ(sh©┤) ō■(j©┤)ĪŻ
╚²ĪóŽĄĮy(t©»ng)¾wŽĄĮY(ji©”)śŗ(g©░u)Ż║
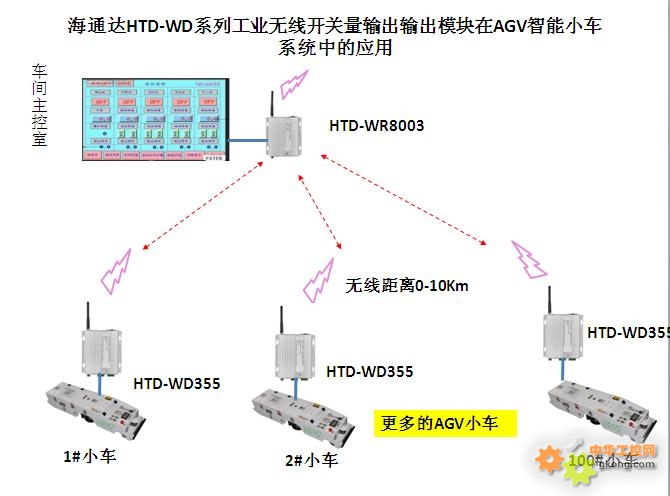
║Ż═©▀_└¹ė├╗∙ė┌Ħ╣żśI(y©©)¤oŠĆ╣”─▄Ą─HTD-WDŽĄ┴ąķ_ĻP(gu©Īn)┴┐▌ö╚ļ▌ö│÷─ŻēKüĒ┼õų├AGVųŪ─▄ūįäė╗»ąĪ▄接Įy(t©»ng)Ż¼įōŽĄ┴ą─ŻēK┐╔ū÷ĄĮ16┬Ę▌ö╚ļĪó16┬Ę▌ö│÷Ż¼┐╔▀Mąą³cī”³c┐žųŲŻ¼Ēææ¬(y©®ng)Ģrķg┐ņŻ¼ąĪė┌600msĪŻ┐╔ęįīŹ¼F(xi©żn)³cī”³cĪó³cī”ČÓ³cĪóČÓ³cī”³cĪóČÓ³cī”ČÓ³c┐žųŲĪŻ
|

