|
���I(y��)�C(j��)����ͨ�^(gu��)�o(w��)�a����ɭModbusTCP�D(zhu��n)CanOpen�W(w��ng)�P(gu��n)MCN-TCPS-CANPM�cPLC�M(j��n)��ͨӍ���@�ǹ��I(y��)�Ԅ�(d��ng)���е�һ�N��Ҋ(ji��n)��(ch��ng)�������@���У�ModbusTCP��CanOpen�ǃɷN��Ҋ(ji��n)�Ĺ��I(y��)�F(xi��n)��(ch��ng)�����f(xi��)�h�����W(w��ng)�P(gu��n)�t���������@�ɷN�f(xi��)�h�D(zhu��n)�Q�Ľ�ɫ��ʹ�ù��I(y��)�C(j��)���˿��Ժ�PLC���ɾ���߉���������M(j��n)��ͨ�š�ModbusTCP��һ�N������̫�W(w��ng)�ąf(xi��)�h�������Ԍ���(sh��)��(j��)�����TCP/IP��ʽ�M(j��n)�Ђ�ݔ���@�N�f(xi��)�h�ă�(y��u)�c(di��n)���������_(k��i)���ԣ��κ��O(sh��)��ֻҪ֧��ModbusTCP�f(xi��)�h�Ϳ����M(j��n)��ͨ�ţ��@����˲�ͬ�O(sh��)��֮�g���B�ӡ�
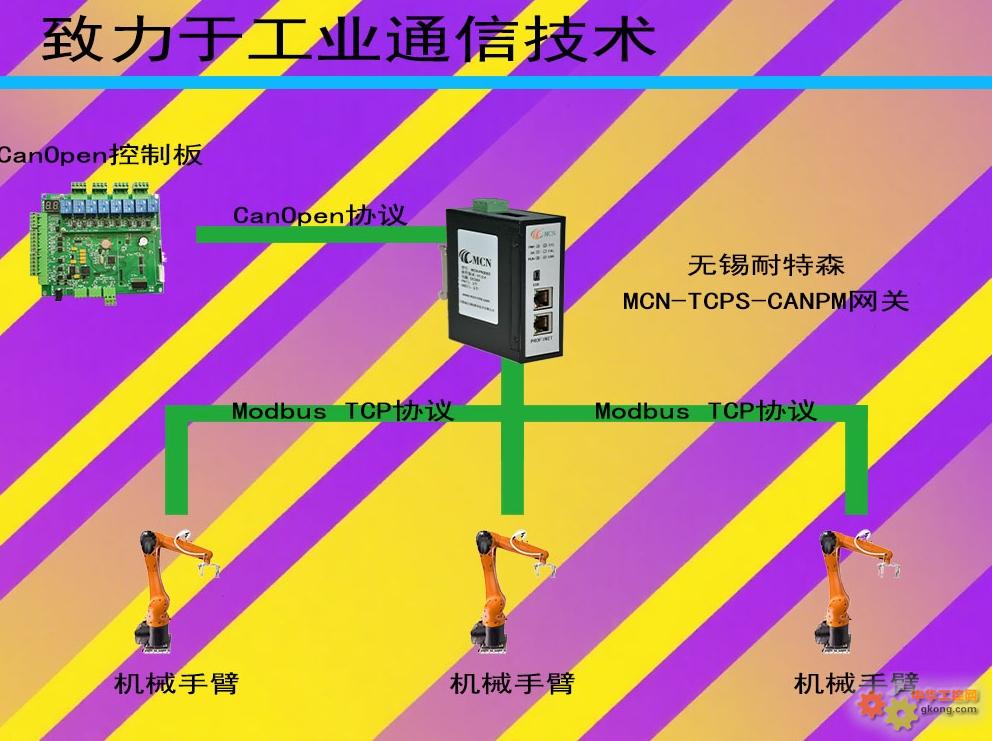
CanOpen����һ�N����CAN�����đ�(y��ng)�ÌӅf(xi��)�h��CAN��������߿ɿ��Ժ͌�(sh��)�r(sh��)�Ա��V����(y��ng)������܇��ӡ����I(y��)�Ԅ�(d��ng)�����I(l��ng)��CanOpen�f(xi��)�h���x���O(sh��)���ͨ�Ō�(du��)��ͷ���(w��)��ʹ���O(sh��)��֮�g��ͨ�Ÿ��Ә�(bi��o)��(zh��n)�����W(w��ng)�P(gu��n)����Ҫ���þ��nj�(sh��)�F(xi��n)ModbusTCP�f(xi��)�h��CanOpen�f(xi��)�h֮�g���D(zhu��n)�Q���ڌ�(sh��)�H��(y��ng)���У��W(w��ng)�P(gu��n)ͨ����(hu��)���յ���(l��i)��һ���Ĕ�(sh��)��(j��)��Ȼ������@Щ��(sh��)��(j��)�������D(zhu��n)�Q����һ�N�f(xi��)�h�ĸ�ʽ������ٌ��@Щ��(sh��)��(j��)�l(f��)�ͽo��һ�����҂��Ϳ��Ԍ�(sh��)�F(xi��n)���I(y��)�C(j��)���˺�PLC֮�g��ͨ�š�PLC����һ�N���ڹ��I(y��)���Ƶ�����O(sh��)�䡣PLC����ͨ�^(gu��)����(xi��)�����(l��i)��(sh��)�F(xi��n)���N���ƹ��ܣ����_(k��i)�P(gu��n)���ơ������ơ�Ӌ(j��)��(sh��)���Ƶȡ��ڹ��I(y��)�Ԅ�(d��ng)���I(l��ng)��PLC�Ƿdz���Ҫ���O(sh��)�䣬�����Դ��������a(ch��n)Ч�ʺ��|(zh��)����

���I(y��)�C(j��)����ͨ�^(gu��)ModbusTCP�D(zhu��n)CanOpen�W(w��ng)�P(gu��n)�cPLC�M(j��n)��ͨӍ���^(gu��)�̣��䌍(sh��)����һ��(g��)�f(xi��)�h�D(zhu��n)�Q���^(gu��)�̡����@��(g��)�^(gu��)���У��҂���Ҫ������N�f(xi��)�h�����c(di��n)���ܣ��Լ�����?n��i)�΅f(xi��)ͬ�����Ԍ�(sh��)�F(xi��n)�O(sh��)��֮�g��ͨ�š��S�����I(y��)�Ԅ�(d��ng)�����g(sh��)�IJ���l(f��)չ���@�Nͨ�ŷ�ʽ����(hu��)Խ��(l��i)Խ�ձ飬����˽����Ǻ��б�Ҫ�ġ�Ҫ��(sh��)�F(xi��n)�@�Nͨ�Ų������£���Ҫһ���Č��I(y��)֪�R(sh��)�ͼ��g(sh��)����Ҫ֪��������þW(w��ng)�P(gu��n)����ξ���(xi��)PLC�����Լ����̎�����ܳ��F(xi��n)�Ć�(w��n)�}�ȡ�߀��Ҫ���]�W(w��ng)�j(lu��)�ķ�(w��n)���ԺͰ�ȫ�ԵȆ�(w��n)�}��

���I(y��)�C(j��)����ͨ�^(gu��)ModbusTCP�D(zhu��n)CanOpen�W(w��ng)�P(gu��n)�cPLC�M(j��n)��ͨӍ��һ��(g��)��(f��)�s���dz���Ҫ���^(gu��)�̡����@��(g��)�^(gu��)���У��҂���Ҫ������N�f(xi��)�h�Ĺ��ܺ����c(di��n)���Լ�����?n��i)�΅f(xi��)ͬ�������҂�߀��Ҫ�߂�һ���Č��I(y��)֪�R(sh��)�ͼ��g(sh��)�����������(sh��)�F(xi��n)�@�Nͨ�š��M���@��(g��)�^(gu��)�̿��ܕ�(hu��)����һЩ���y�����S���҂��IJ����W(xu��)��(x��)�͌�(sh��)�`���҂�һ���܉�˷��@Щ���y����(sh��)�F(xi��n)���I(y��)�C(j��)���˺�PLC֮�g�ĸ�Чͨ�š�
|

