|
����
�P�������쾀����D���҂����������ֽ�B���@�ǵڶ�ƪ���¡� �ڵ�һ�����У��҂���B�������D�������鿴��Ӱ������������ء��ڵڶ����֣��҂���ӑՓ�Ű�Ͳ���бҕ���Ű���y��ҕ���������҂����������c�����D�Q������̖��B�������ԣ����Ű��������g��B���������҂�̽ӑ����бҕ�Ć��}������бҕ���҂�ʹ�����ƣ�������ʹ���挍�r�g���t��ʹ�����D��r���쾀���l�η����ȟo�۽��ĬF���҂�߀��ӑՓ�@�ɷN�D��֮�g�ę��ȡ�ᣬ���˽Ⲩ��бҕ������ϵ�y��Ӱ푡�
�Ű꺆��
��Ŀǰ��ֹ���҂�ֻҊ�^Ԫ���g����d = λ/2�@�N��r���D1�_ʼ�f����ʲôλ/2��Ԫ���g������������˳�Ҋ���D�й��@ʾ�ɷN��r�����ȣ����{ɫ���l���؏��@ʾ��1���ֈD11�е�30°�D��������d/λ�g�����ӵ�0.7�����@ʾ�쾀�������׃����ע�⣬�S���g�����ӣ��������ȜpС���@��һ���e�O�F����ֵ�g���pСʹ�����ľ��x���ӽ����@Ҳ���Խ��ܡ����ǬF�ڳ��F�˵ڶ����Ƕȣ��ڱ����О�–70°,��ԓ�Ƕ��³��F��ȫ������档�@����鲻������r���@�N�쾀������Ʊ����x��һ���Ű꣬���Ա��J���ǿ��g��B��
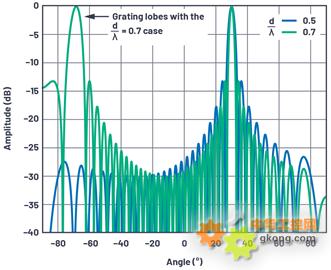
�D1.�ڃɷN��ͬ��d/λ�g���£�32Ԫ��������еĘ˜ʻ�������ӡ�
�ɘ�ϵ�y���
�錍�F�Ű��ҕ�������Ԍ���Ȟ�ɘ�ϵ�y�еĻ�B�F����ģ���D�Q��(ADC)�У��������Y��ͨ�������l���M��Ƿ�ɘӡ�Ƿ�ɘӰ������⽵�Ͳɘ���(fS)��ͨ�^�ɘ��^�̌�����fS/2���l�ʣ��^�ߵ��ο�˹�^���D�Q���һ���ο�˹�^�Ļ�B���@ʹ���@Щ�^���l�ʿ������ƺ���ADCݔ���˞��^���l�ʡ�
���Կ��]�������в�����Ƶ�ȷ�������ԓ����У���Ԫ������ǰ�M�п��g�ɘӡ�����҂����h���˱����B����ÿ�����L��ʩ�ɴβɘӣ���Ԫ��������ô�ο�˹�ʄt���ԔUչ���õ����g�^����ˣ����Ԫ���g������λ/2���҂����Կ��]�@�N���g��B��
Ӌ��Ű���F��λ��
�����@Щ���g��B���Ű꣩�����F������ڵ�1�����У��҂�չʾ�����������Ԫ���������c�����Ƕ�֮�g�ĺ����Pϵ��

���^�����҂����Ը����c���Ƶĺ����Pϵ��Ӌ�㲨���Ƕȡ�

arcsin����ֻ�a��-1��+1֮�g�Č����⡣���@Щ����֮�⣬�o���õ������⣬��Ӕ�����ܛ���Е����F“#NUM!”��߀Ҫע�⣬����2�е���λ�������ԣ�ÿ��2π�؏�һ�Ρ����ԣ��҂�����ʹ��(m × 2π + ?Φ)ȡ�������D��ʽ�е�?Φ���M���ó���ʽ3��

����m = 0��±1��±2…
���˱���Ű꣬�҂���Ŀ���ǫ@�Æ�һ�����⡣�Ĕ��W���v���@ͨ�^ʹ��ʽ�����팍�F

����҂��@��������ô���еĿ��g�D��m =±1��±2�ȣ����a���nj���arcsin�Y�����҂����Ժ���������������҂������@��������ôijЩm > 0��ֵ���a������arcsin�Y������ô�҂����ó������⣺�Űꡣ

�D2.arcsin�����ږŰ��еđ��á�
d > λ��λ = 0°�ĖŰ�
�҂��Lԇͨ�^һЩʾ�������õ��f���@һ�c�����ȣ����]�Cе�S��У��ʾ��������θ = 0������?Φ = 0��Ȼ����ʽ3�����鹫ʽ5��

ͨ�^�@�N�������������@���������λ/d > 1����ôֻ�Ю�m = 0���ſ��Եó���–1��+1֮�g�ą������@����������0����arcsin(0) = 0°��Ҳ���ǙCе�S��У�ʽǶȡ��@�����҂������@�õĽY�������⣬m ≥ 1�r��arcsin�������dz���(>1)�������ó������Y�����҂����Կ�����θ = 0��d < λ�r���]�ЖŰꡣ
���ǣ����d > λ��ʹ��λ/d < 1�����t�����ڶ�����͖Űꡣ���磬���λ/d = 0.66����d = 1.5λ�����tm = 0��m = ±1�r����arcsin�����⡣m = ±1�ǵڶ����⣬��������̖�Ŀ��g��B����ˣ��҂��������������꣬�քeλ��arcsin(0×0.66)��arcsin(1×0.66)��arcsin(-1×0.66)��ÿ�����������s��ȡ�����öȔ���ʾ���@Щ�ǶȞ�0°��±41.3°�����ϣ��@���LjD3�е�������ӈD��ʾ�ă��ݡ�
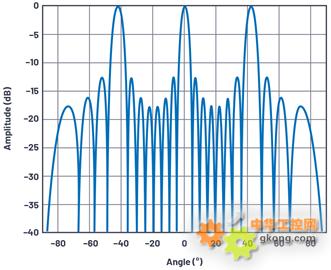
�D3.d/λ = 1.5��N = 8�r���S��У�ʵ�������ӡ�
λ/2 < d < λ�r�ĖŰ�
�ں����Ű귽�̣�����5���r���҂��x��ֻ���Cе�S��У��(?Φ= 0)���҂�߀�������ڙCе�S��У�ʕr��d < λ�r�������F�Űꡣ���ǏIJɘ���Փ��У��҂�֪�������g������λ/2�r�������FһЩ��͵ĖŰꡣ���ԣ���λ/2 < d < λ�r���Ű���ʲôλ�ã�
���ȣ����һ���ڵ�1���ֵĈD4�У���λ������S�D��Ƕ�׃���ġ��҂�������������ƫ�x�Cе�S��У�ʕr��?Φ�ķ�����0��±π����ˣ�

�ķ�����

|m|≥1�r����ֵ�t����ԓ����

����҂���Ҫ������|m| ≥ 1����r�£���������arcsin����> 1���t��������С�����S��λ/d�����]�ɷN��r��
- u ���λ/d ≥ 2����d ≤ λ/2�����t�oՓm��ֵ����٣����������F�����⡣m > 0�����нⶼ������arcsin���� > 1���@��Ψһ����ˮƽ������F�Ű�ķ�����
- u ���ǣ�����҂����⌢?Φ���ƞ�С��±π����ô�҂����Խ����^С��λ/d���Ҳ������F�Űꡣ�pС?Φ�ķ�����ζ���pС��е�����D��Ƕȡ��@��һ�N��Ȥ�ę�⣬������һ����̽ӑ��
Ԫ���g�����]
Ԫ���g���Ƿ�ԓʼ�KС��λ/2��������ˣ��@�����쾀�OӋ�ˆT��Ҫ�����Ŀ��]�͙�⡣���������ȫ���D��ˮƽ������θ = ±90°���t��ҪԪ���g����λ/2�������Ҋ�İ�A�Ȳ����S���F�Ű꣩�����ڌ��H�����У��Ɍ��F������D��Ƕȿ���С��90°���@������Ԫ�����ӣ��Լ��ڴ��D��Ƕ��µ�������������ġ�
�ĈD2��ʾ��arcsin�D�У��҂����Կ��������y�Sθ���ƞ�pС����ֵ���t�Ű�ֻ�ڲ���ʹ�õĒ���Ƕ��³��F�����ڽo����Ԫ���g��(dmax)���f���@�N�pС����ֵ(θmax)�Ƕ��٣��҂�֮ǰ�f�^���҂���Ŀ����ʹ��ʽ����

�҂�����������Ӌ���һ���Ű�(m =±1)���F��λ�á��F��ʹ�õ�1��������?Φ�Ĺ�ʽ1���ó���

���Ժ�����

Ȼ��ó�dmax

ԓdmax ���ڜpС�Ē���Ƕ�(θmax)�]�ЖŰ�ėl��������θmax С��π/2 (90°)�����磬�����̖�l�ʞ�10 GHz���҂���Ҫ�ڛ]�ЖŰ����r���D��±50°���t���Ԫ���g���飺

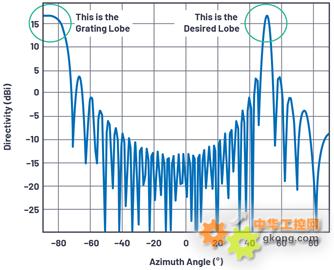
�D4.θ = 50°��N = 32��d = 17 mm��Φ = 10 GHz�r���Ű��_ʼ��ˮƽ������F��
ͨ�^����������Ƕȣ��������ɵؔUչԪ���g��������ÿ��ͨ���������ߴ磬�Լ��Uչ�o��������Ԫ���Ŀ������磬���������@���F���쾀�����ஔ�Mխ���A���x����Ԫ������������������A�ȶ��x�ķ������ṩ�����ԣ�Ԫ���g��Ҳ���������Ԍ��F��������@�ɷN�����������^խ�IJ����Ƕ��«@���^������w�쾀���档
ע�⣬����3��ʾ����g����һ�����L����ʹ�����D��Ƕ���Ҳ����ˡ���һЩ��r�£�����Ű겻���F�ڿ�Ҋ��A�ȼ��ɡ��Ե���ͬ���l�Ǟ��������ԙCе�S��У�ʞ����ģ���9°���D��Ƕȸ��w�����������@�N��r�£�ֻҪ�Ű겻���ڵ������Ϳ��ԡ���ˣ�Ԫ���g�������_���ׂ����L��ʹ�ò������ȸ�խ��
߀��һЩֵ��ע����쾀�Y����ԇ�Dͨ�^�γɲ�һ�µ�Ԫ���g����˷��Űꆖ�}���@Щ���w��������У���������О��������ڙCе�쾀�����ԭ���҂�����ϣ����һ��ͨ�õĿ��ԔUչ�������еĘ���ģ�K�����ǣ��@���γ�һ�µ���У����������ĖŰ�l��Ӱ푡�
����бҕ
�ڵ�1�����У��҂��_�^�������ڲ���ӽ�Ԫ����Еr����λ����������S��У�ʵIJ���Ƕ�θ��Ԫ��֮�g���F�r�g���t�����چ�һ�l�ʣ����������ƴ���r�g���t�팍�F�����D���@�N�����m����խ�����Σ�������ͨ�^���Ʈa�������D��Č������Σ����������D�Ʒ����c�l�ʳʺ����Pϵ��������҂�ӛ�Õr�g���t�Ǿ��������c�l��֮�g���Pϵ���t����ֱ�^�ؽ�ጡ����ԣ����ڽo���IJ�������Ҫ�������S�l��׃���������෴�����ڽo�������ƣ����������S�l��׃���������Ƕ��S�l��׃���Ġ�r�����Q�鲨��бҕ��
߀���]�����S��У��λ��θ = 0�r���]�п�Ԫ�������ƣ���˲����a���κβ���бҕ����ˣ�����бҕ��������c�Ƕ�θ���l��׃���ʺ����Pϵ���D5�@ʾһ��X�l��ʾ�����ڱ����У������l�ʞ�10 GHz���{�Ǝ�����2 GHz���Һ��@Ȼ�����S�l�ʺͳ�ʼ�����Ƕȵ�׃������׃����
�D5.32Ԫ���������Ԫ���g����λ/2�r����X�l���ϵIJ���бҕʾ����
����бҕ����ֱ��Ӌ�㡣ʹ�ù�ʽ1��ʽ2������Ӌ��ó���������ƫ��Ͳ���бҕ

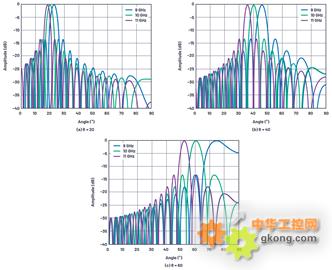
�˹�ʽ��D6��ʾ���ڈD6�У��@ʾ��f/f0����������ġ�ǰһ�����̵ĵ���(f0/f)�ṩ��һ�N�����ķ��������Ը�ֱ�^�ر�ʾ�����������l�ʵ�׃����
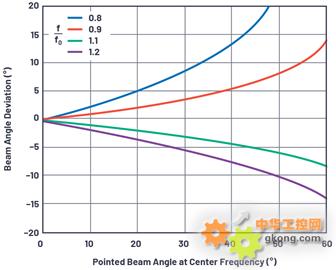
�D6.�N�l��ƫ���µIJ���бҕ�Ͳ����Ƕȡ�
�P�ڲ���бҕ�Ď��c�^��l�F��
- �����Ƕ��c�l�ʵ�ƫ���S�������Ƕ�ƫ�x�S��У�ʵĽǶ����������
- ���������l�ʵ��l�ʱȸ��������l�ʵ��l�ʮa�������ƫ�
- ���������l�ʵ��l�ʕ�ʹ���������h�x�S��У�ʡ�
����бҕ���]
����бҕ�����D��Ƕ��c�l�ʵ�ƫ��������Ɓ팍�F�r�g���t��ɵġ����挍�r�g���t��Ԫ����в����D��t�������F�ˆ��}��
��Ȼ����бҕ���}������@����ʲô߀����ʹ���������������Ǖr�g���t��Ԫ�أ�һ����ԣ��@�w�����OӋ���Σ��Լ��������͕r�g���t��Ԫ��IC�����ԡ��r�g���t��ijЩ��ݔ������ʽ���F������Ŀ����t�r�g�c����С�ʺ����Pϵ����Ŀǰ��ֹ����������õ�ģ�M��������IC���ǻ������ƣ���Ҳ���F��һЩ�挍�r�g���tICϵ�У������������и��ӳ�Ҋ��
�ڔ��ֲ��������У��挍�r�g���t���Բ���DSP߉�͔��ֲ��������㷨���F����ˣ�����ÿ��Ԫ�������ֻ������ꇼܘ����������Ϳ��Խ�Q����бҕ���}�����ṩ��ߵľ����`���ԡ����ǣ��@�N��Q�����Ĺ��ܡ��ߴ�ͳɱ�������Ɇ��}��
�ڻ�ϲ��������У���ꇲ���ģ�M�������ͣ�ȫꇲ��Ô��ֲ������͡��@�����ṩһЩֵ�ÿ��]�IJ���бҕ�p�١�����бҕֻ�����Ӱ푣���ꇵIJ������ȸ�������ˌ������Ƕ�ƫ������̶ȸ�����ˣ�ֻҪ��ꇵIJ���бҕ�ǿ����̵ģ������ں���挍�r�g���t�����ֲ������ͣ�����ꇃȲ��Î��������Ļ�ϲ������ͽY����
���Y
���Ͼ������P�����쾀����D�������еĵ�2���փ��ݡ��ڵ�1���֣��҂���B�˲���ָ���������ӡ��ڵ�2���֣��҂�ӑՓ�Ű�Ͳ���бҕ��ȱ�c���ڵ�3���֣��҂���ӑՓ���ͨ�^�쾀׃խ�sС�꣬���������˽������������`�
|

