����
�mȻ��(sh��)���������̘I(y��)�Լ����պ���ͷ���(w��)��(y��ng)���в������L�����S���O(sh��)Ӌ���̎��������쾀�������˽⡣�����쾀�O(sh��)Ӌ�������������(j��ng)�^��(sh��)ʮ��İl(f��)չ���@һ��Փ�ѽ�(j��ng)�ஔ���죬���ǣ������(sh��)�īI�H�m�Ͼ�ͨ늴Ŕ�(sh��)�W(xu��)���쾀���̎����S�������_ʼ������������̖�͔�(sh��)�փ�(n��i)�ݣ��S��̎����ԏĸ�ֱ�^�������쾀����D�f���Ы@�档���C���������쾀�О��c�����̖�͔�(sh��)�ֹ��̎�ÿ��̎�����xɢ�r�g�ɘ�ϵ�y(t��ng)֮�g���S������֮̎��
��ϵ�����µ�Ŀ�IJ������B(y��ng)�쾀�O(sh��)Ӌ���̎���������ʹ��������ϵ�y(t��ng)�������Ĺ��̎�չ�F(xi��n)�����Ĺ����������쾀����D��Ӱ푡�
��������
���ȣ��҂�������һ��ֱ�^�����ꇲ����D(zhu��n)��ʾ�����D1��һ�����εĈDʾ�����L�˲�ǰ�ăɂ���ͬ���������Ă��쾀Ԫ�����ڽ���·���ϵ�ÿ���쾀Ԫ�����涼���a(ch��n)���ӕr��֮�������Ă���̖�مR����һ���ڈD1a�У�ԓ�ӕr�c��ǰ���_ÿ��Ԫ���ĕr�g��һ�¡��ڱ����У��a(ch��n)�����ӕr����(d��o)���Ă���̖ͬ�ൽ�_�ϲ��c���@�Nһ�µĺϲ��������M����ݔ������̖���ڈD1b�У��a(ch��n)�����ӕr��ͬ�����ڱ����У���ǰ�c�쾀Ԫ����ֱ���F(xi��n)�ڮa(ch��n)�����ӕr�c�Ă���̖����λ��һ�£���˽M����ݔ���������������
�D1.�����D(zhu��n)��Ƕȡ�
�������У��ӕr�Dz����D(zhu��n)������Ŀ�����׃������Ҳ����ͨ�^���Ɓ������ӕr���@���S�����F(xi��n)����ʮ�ֳ�Ҋ�Ҍ��õ��������҂����ڽ�B����бҕ�IJ���ӑՓ�ӕr�c���Ƶ�Ӱ푣���Ŀǰ�҂��ȁ��˽����ƌ��F(xi��n)��Ȼ���ƌ�(d��o)����(y��ng)���ƵIJ����D(zhu��n)��Ӌ�㡣
�D2��ʾ��ʹ�������������ӕr���������С�Ոע�⣬�҂�����ʾ�����(θ = 0°)���x�鴹ֱ���쾀���档��ʾ��҂�(c��)���x������θ����ʾ����(c��)���x��ؓ�ǡ�
�D2.ʹ��RF�����������ꇸ��
Ҫ�@ʾ�����D(zhu��n)����������ƣ�����������Ԫ��֮�g�L��һ�Mֱ�������Σ���D3��ʾ�����У�ΔΦ��ʾ�@Щ����Ԫ��֮�g�����ơ�
�D3.����ΔΦ�c�����D(zhu��n)��Ƕȵ��ƌ�(d��o)��
�D3a���x���@ЩԪ��֮�g�����Ǻ��ʽ����Ԫ��֮�g������x��(d)��ʾ������ָ���c��ʾ����θ�ķ��������xҕƽ���ĽǶȞ�φ���ڈD3b�У��҂�����θ�cφ�ĺ͞�90°���@���҂��Ϳ���Ӌ��L�����L = dsin(θ)��L��ʾ��������׃�����x�������D(zhu��n)��������ӕr���ڲ�ǰ��vԓ���xL���õĕr�g�������Lҕ�����L�ķ֔�(sh��)���t��λ���t������ԓ�ӕr�����ΔΦ��ʽ���Զ��x��������θ����D3c��ʾ�Լ���ʽ1�е��؏�(f��)Ӌ�㡣
���Ԫ���g�����õ�����̖���L��һ�룬�t�����Mһ�������飺
�҂��Ծ��wʾ����Ӌ���@Щ��ʽ�����O(sh��)�ɂ��쾀Ԫ���g��15 mm�����һ��10.6 GHz�IJ�ǰ�Ծ��x�Cе��ʾ�30°�ĽǶȵ��_����ô�@�ɂ�Ԫ��֮�g����������Ƕ��٣�
θ = 30º = 0.52 rad
λ = c/f = (3 × 108 m/s)/10.6 GHz = 0.0283 m
?Φ = (2π × d × sinθ)/λ = 2π × 0.015 × sin(0.52)/0.0283 m = 1.67 rad = 95º
���ԣ������ǰ��θ = 30°���_����������Ԫ������λ�Ƅ�95°���t����ʹ�ɂ�Ԫ�����Ե���̖���F(xi��n)һ�¯B�ӡ��@�ӾͿ���ʹԓ������쾀�����_�����ֵ��
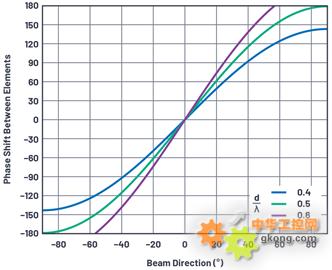
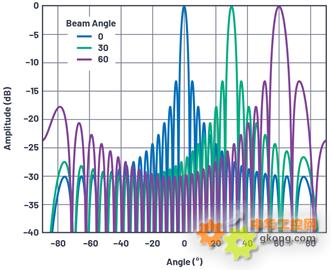
������������������S����������(θ)��׃���D4�ԈD�η�ʽ�L���˲�ͬ�l���µ��@Щ��ʽ�D�⡣���@Щ�D���п����^�쵽һЩ��Ȥ�ĬF(xi��n)���磬d = λ/2�r����ʾ�������б�ʼs��3:1������ʽ2�еij˔�(sh��)π���@�N��r߀չʾ����Ԫ��֮�g�_��180°�������ƕ�ʹ���������_����Փ����90°�����H�ϣ����挍��Ԫ������D�У��@�Dz����܌��F(xi��n)�ģ�����ʽ�Ĵ_�@ʾ����Փ�ϵ�����ֵ����Ҫע����ǣ�d > λ/2�r���������܉��ṩ��������λ�Ƶ����ơ��ں���������У��҂�������Bԓ��r����(d��o)���쾀����D�еĖŰ꣬ԓ�D���ǵ�һ�α�����d > λ/2��r�µ��О�������ͬ��
�D4.���Nd/λ��r�£�Ԫ��֮�g������ΔΦ�c��������(θ)֮�g���P(gu��n)ϵ��
���g���������
�����ƌ�(d��o)�ĵ�ʽ�H�m���ڃɂ�Ԫ���������H�����ꇿ����ڃɂ��S���ϰ�����(sh��)ǧ���g���_��Ԫ���������ڱ�����;���҂��H���]һ���S�ȣ�������С�
������О��Ԫ�����ȣ����а���N��Ԫ������ͬ������У��g�����ܸ��в�ͬ����ͬһ�������ͨ���ǵ��g������ˣ��ڱ����У��҂�������Ԫ��֮�g���g���O(sh��)��y(t��ng)һ���xd���D5����ԓ���g���������ģ���mȻ�Ǻ����棬��������B���쾀����D����γ��Լ����N��ͬ�ėl�����҂������Mһ���\�þ������ԭ���������S��С�
�D5.���g���������(N = 4)��
�����c�h��
��Ό�����ᘌ�N = 2�ľ�������ƌ�(d��o)�Ĺ�ʽ�\�õ�N = 10,000�ľ�������أ��F(xi��n)�ڣ��ƺ�ÿ���쾀Ԫ����������ͬ�ĽǶ�ָ�����β�ǰ����D6��ʾ��
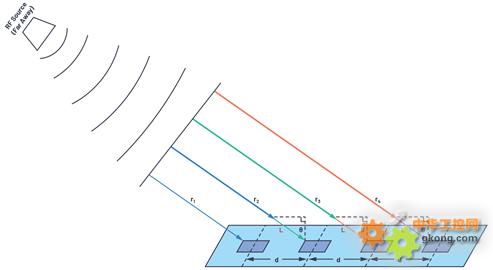
�D6.RF��̖Դ�c��������^����
���RFԴ�^�����tÿ��Ԫ��������Dz�ͬ���@�N��r�Q��������҂�������������@Щ�Ƕȣ��Еr��Ҫ�@ô���Ǟ����M���쾀�yԇ��У�ʣ�����҂��Ĝyԇ�b��ֻ���@ô�����RFԴ�^�h���t���LjD7��ʾ����r��
�D7.RF��̖Դ�c�����������^�h��
���RFԴ�^�h���t���β�ǰ�Ĵ�돽����(d��o)�´���ƽ�еIJ�����·������ˣ����в����Ǿ���ȣ�ÿ������Ԫ����·���L��(L = d × sinθ)�����^����Ԫ�����@�Ӻ����˔�(sh��)�W(xu��)Ӌ�㣬��ζ���҂��ƌ�(d��o)�������pԪ����ʽ���ԑ�(y��ng)�õ���(sh��)ǧ��Ԫ������ǰ�����@ЩԪ���g����ͬ��
����ʲô��r�¿��������h�����O(sh��)���h���ж��h���mȻ���@���^����ͨ�����ԣ��h�����x�dz��^��
���У�D��ʾ�쾀ֱ�������ڵ��g��������О�(N-1) × d��
����С����У�DֵС������l��λֵ���h�����x�^С�������ڴ�����У�����l�����h�����x�����L�_��(sh��)ǧ�ף��@�Ӝyԇ��У����о�ʮ�����y�������@���r������ʹ�ø���Ԕ���Ľ���ģ�ͣ�Ȼ���ٰ������Uչ���挍����ʹ�õ��h����С�
�쾀���桢�����ԺͿ�
���^�m(x��)����֮ǰ�����˽��쾀���桢�����ԺͿ��Ķ��xʮ�����á����Ƚ�B�����c�����ԣ�����@�ɂ����(j��ng)�����Qʹ�á��쾀����ͷ����������^�ڸ���ͬ���쾀���ԣ�����ͬ���쾀�����з������ݗ��������쾀����������ָ���ض������Ϝy�õ������P max �c���з���ݗ���ƽ������P a v�ı�ֵ������]�ж��x���t������ͨ�^��ʽ4�_����/p>
�ڱ��^�쾀�r����������һ������ָ�ˣ���������x�˼���ݗ�������������������c�����Եķ���D��ͬ������������쾀�p�ġ�
P rad �ǿ�ݗ�书�ʣ� P in ��ݔ�뵽�쾀�Ĺ��ʣ�k��ʾ�쾀ݗ���^���еēp�ġ�
�������҂����쾀����Dҕ�����S����ĺ���(sh��)����������ҕ�鲨�����ȵĺ���(sh��)��
�D8.Ͷ�䵽���w����e�����Sҕ�D��
���w�Ŀ�����e��4π2�����w�ϵ���e������Ȟ��λ���x���������w�е�4π����ȡ���ˣ����Ը���ͬ��ݗ���w�Ĺ����ܶȞ�
���õĆ�λ��(W/m2).
���w�ϵ�һ�K��e�Ѓɂ��Ƿ��������_ϵ�y(t��ng)�У��@�ɂ��Ƿ���ͨ���Q����λ�Ǻ����ǡ��������ȿ���������ÿ���Ƿ���ĺ���(sh��)��θ1��θ2����ԓ�M�ϕ������w���γ�һ�K��eΩA.
ΩA��������Ȟ��λ��ʾ�IJ������ȣ����Խ��ƞ�ΩA ≈ θ1 × θ2.
�_�JΩA�����w�ϵ���e�����Կ��Ա�ʾ��
�҂���Ҫ���]�ĵ������쾀�g(sh��)�Z�ǿ����쾀����ʾ���ڽ���늴Ų�����Ч��e�����������ڲ��L�ĺ���(sh��)������ͬ���쾀�Ŀ���
�����������ڸ���ͬ���쾀���ԣ��a(ch��n)������Ч�쾀����
�C�������g(sh��)�Z���������Ԍ�����ҕ�����ڶ��xݗ�䷽��D�Ľǵĺ���(sh��)����ʾ�쾀�е�Ч�ʣ���p�ģ���
�������������
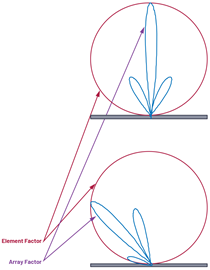
Ŀǰ���҂��܉��A(y��)�yԪ��֮�g����ѕr�g������λ��׃���팍�F(xi��n)����쾀�����ԡ����҂��dz���Ҫ�˽�Ͳ����������쾀���淽��D���@�֞�ɂ���Ҫ���档���ȣ���е�ÿ������Ԫ�������S���NƬ�����������棬�Q��Ԫ������(GE)����Σ�ͨ�^��в������͕��a(ch��n)������Ӱ푣��Q��������� (GA)��ȫ����쾀���淽��D���@�ɂ����ӵĽM�ϣ����ʽ10��ʾ��
�D9.Ԫ�����Ӻ�������ӡ�
�D9.Ԫ�����Ӻ�������ӡ�GE��ʾ����І�Ԫ����ݗ�䷽��D���䶨�xȡ�Q���쾀�Ď��Π�͘�(g��u)�죬���������\���Е��l(f��)��׃�������ء�֪���@һ�c����Ҫ������@�����ƿ���е�����——�����ǿ���ҕƽ���r���������҂���������ӿ��ƣ���˿��Ԍ������̶ֹ���׃�����鿂���������ʽ��Ӱ����ӡ��ڱ����У��҂����O(sh��)���Ъ���Ԫ��������ͬ��Ԫ�����ӡ�
�������c��B�������GA��������ӵ�Ӌ�������ЎνY(ji��)��(g��u)��d��ʾ���g��������У��Ͳ�����(qu��n)�أ����Ⱥ���λ�����ƌ�(d��o)���g��������е��������ʮ�ֺ��Σ�������ĩβ���õą����īI��Ԕ����B�����P(gu��n)��(n��i)�ݡ�
�īI��ʹ�õĵ�ʽ���в�ͬ�����wȡ�Q�ھ�����Ѕ���(sh��)�Ķ��x��ʽ���҂�ʹ�ñ����еĵ�ʽ���Ա��c�D2�͈D3�еĶ��x����һ�¡�������Ҫ���}�����������׃��������L�������چ�λ����Ę˜ʻ��������ͨ������ָ��(d��o)���x���˜ʻ�������ӿ��Ԍ����ʽ11��
�҂��ь������Ƕ�θ0���x��Ԫ��֮�g�����Ƶĺ���(sh��)θ0����ˣ��҂�Ҳ���Ԍ��˜ʻ��쾀���ӌ����ʽ12
������ӵ�ʽ�м��O(sh��)�ėl��������
Ԫ���g����ȡ�
Ԫ��֮�g��������ͬ��
����Ԫ���ķ�����ͬ��
�������҂������@Щ��ʽ�L�ƶ�N��гߴ��������ӡ�
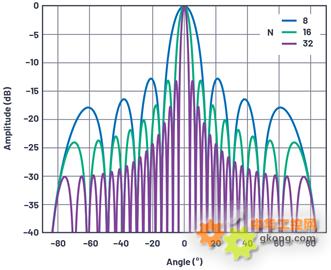
�D10.λ�ھ��������ʾ��Ę˜ʻ�������ӣ�����Ԫ���g����d = λ/2��Ԫ����(sh��)���քe��8��16��32��
�D11.̎�ڶ�N�����Ƕȵ�32Ԫ��������еĘ˜ʻ�������ӣ�����Ԫ���g����d = λ/2��
���@Щ��(sh��)��(j��)�п����^�쵽�����c��
��һ����λ��–13 dBc���cԪ����(sh��)���o�P(gu��n)���@����������ӵ�ʽ�е�sinc����(sh��)�Q���ġ������ͨ�^��u�p��Ԫ���е���������ƣ��@һ���}���ڱ�ϵ�к��m(x��)��(n��i)����̽ӑ��
���������S��Ԫ����(sh��)�����pС��
����IJ����x��ʾ�Խ�h���������ȕ��S֮׃����
���c�Ĕ�(sh��)���S��Ԫ����(sh��)�������Ӷ����ࡣ
��������
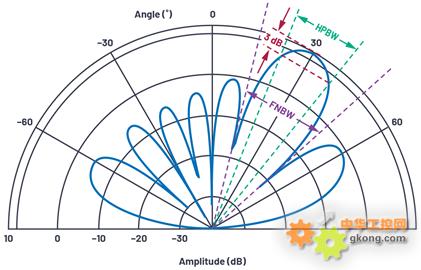
�����������쾀�Ƕȷֱ��ʵ�һ��ָ�ˡ��Ҋ����ͨ�^�빦�ʲ�������(HPBW)����������c�����c���g��(FNBW)���x�������ȡ�Ҫ�ҵ�HPBW���ķ�ֵ�����Ƅ�3 dB�����y���Ǿ࣬��D12��ʾ��
�D12.�쾀�������ȵĶ��x����ʾ������О�N = 8��d = λ/2��θ = 30°����
�����҂��Ę˜ʻ�������ӵ�ʽ������ͨ�^����ʽ3�O(sh��)����ڰ빦�ʼ��e��3 dB��1/√2��������ԓHPBW���҂����O(sh��)�Cе��ʾ�(θ = 0°)��N = 8��d = λ/2��
Ȼ�����?Φ�ó�0.35 rad�����õ�ʽ1������θ��
ԓθ�ǵ��_3 dB�c����HPBW��һ�룩�ķ�ֵ����ˣ��҂�ֻ��Ҫ��������2���ɫ@��3 dB�c֮�g�ĽǾࡣ�@���ó�12.8°��HPBW��
�҂����Ԍ�����0����������؏�(f��)�@��Ӌ�㣬���@����ǰ�������l���µĵ�һ�����c�����c���g���Ƕ�FNBW 28.5°��
���ڵ��g��������У���ʽ15��Ӌ���HPBW [1,2]�Ľ���ֵ��
�D13�L������λ/2Ԫ���g���l���¶�NԪ����(sh��)���IJ��������c�����ǡ�
�D13.Ԫ����(sh��)����16��32��100�r��Ԫ���g����λ/2�IJ��������c�����ǡ�
�ڴˈD�У�ֵ��ע������c�I(y��)�������_�l(f��)����гߴ����P(gu��n)��һЩ�^��Y(ji��)����
1°��������Ҫ�����100��Ԫ���������λ�Ǻ����Ƕ��д�Ҫ�t���a(ch��n)������10,000��Ԫ������С�1°����ֻ�����F(xi��n)�ڽ�������l���µ���ʾ�̎���ڬF(xi��n)������У���Ҫ�ڶ�N������б���1°���ȣ������Mһ������Ԫ����(sh��)�����@һ�^��Y(ji��)�����鳬������O(sh��)���������ȵČ��H���ơ�
1000��Ԫ��������ǘI(y��)�糣Ҋ��С����ÿ������32��Ԫ�����t��������1024��Ԫ����������ʾ�̎���a(ch��n)��С��4°�IJ������ȡ�
256��Ԫ������п��Եͳɱ����a(ch��n)�������Ծ���С��10°�IJ���ָ�ȡ��@���S���S����(y��ng)���܉���ܵ������x��
����߀��ע����ǣ����������κ���r������������60°ƫ��̎�����������@������ĸ����cosθ�������ͶӰ�s�p��Ӱ푣�������ij���Ƕ��^��r����п��������ǿsС�Ľ��沿�֡�
�M��Ԫ�����Ӻ��������
��һ��(ji��)�H���]��������ӡ��������ҳ����쾀���棬߀��ҪԪ�����ӡ��D14������һ��ʾ������ԓʾ���У��҂�ʹ��һ�����ε������Π�����Ԫ�����ӣ���˜ʻ�Ԫ������GE(θ)�����ҝL�������ꇷ�����ʮ�ֳ�Ҋ��������]����ƽ�棬�t���Ԍ����@ʾ�������ڌ�߅����һ�������e���S���Ƕ��h�x��߅����Ҋ��e���S�����Һ���(sh��)���pС��
�����ĵ�λ/2�g��������ݗ�䷽��D����16��Ԫ���ľ��������ʹ�����������GA(θ)��������D��Ԫ�����Ӻ�������ӵľ��Գ˷e����˲���dB�̶ȣ����Ԍ�������ӡ�
�D14.Ԫ�����Ӻ�������ӽM���γɿ��쾀����D��
�S�������h�x��ʾ���һЩ�^��Y(ji��)����
�������ķ�ֵ����Ԫ�����ӵ�����˥�p��
��ʾ��ϵ���]�з��ȓpʧ��
��ԭ����ʾ��r���w��е��������½���
�쾀�L�D���ѿ����c�O����
Ŀǰʹ�õ��쾀����D�L�Dһֱ���õѿ������ˡ������ØO�����L���쾀����DҲ�ܳ�Ҋ��������������ױ�ʾ���쾀���ⲿ���gݗ����������D15�LjD12�����L�汾����ʹ�õ��ǘO���ˡ�Ոע�⣬���õĔ�(sh��)��(j��)��ȫ��ͬ��ֻ���ԘO����ϵ�y(t��ng)�����L�ơ��܉�����һ��ʾ�����ʬF(xi��n)�쾀����D��ʮ�������x�ģ�����@�ɷNϵ�y(t��ng)���īI�о���ʹ�á��ڱ�ϵ�еĴփ�(n��i)���У��҂���ʹ�õѿ������ˣ����ԓ��ʾ���������ױ��^�������Ⱥ������ܡ�
�D15.N = 8��d = λ/2��θ = 30°�ĘO�����쾀�������L�D��
��������
����Ŀǰ�����ЈD������־�����������н��յ���̖����ô���ڰl(f��)����Е��кβ�ͬ�أ����\���ǣ������(sh��)�쾀����д���������P(gu��n)ϵ����ˣ������쾀�����ЈD�⡢��ʽ���g(sh��)�Z�c�l(f��)���쾀��ͬ���Еr������ҕ������н��Օ����������⡣���Еr������͖Ű���ԣ����S�����ҕ��l(f��)�䲨������ֱ�^���ڱ����У��҂�ͨ������������������̖����������������y������Ҳ���ԏİl(f��)��Ƕ�˼����ͬ�ĸ��
�Y(ji��)
��ϵ�е�1�������˽Y(ji��)�������Ľ�B���P(gu��n)�����ꇲ����D(zhu��n)��ĸ���ƌ�(d��o)���ԈD�η�ʽչʾ���Á�Ӌ�㲨���D(zhu��n)���������Ƶĵ�ʽ��Ȼ��ͨ�^�^��Ԫ����(sh��)����Ԫ���g���Ͳ����nj��쾀푑�(y��ng)��Ӱ푣����x��������Ӻ�Ԫ�����ӡ����չʾ���Եѿ����c�O���˱�ʾ���쾀����D���ȡ�
�ڱ�ϵ�к��m(x��)�����У����Mһ��̽ӑ�����쾀����D�͜p�p���҂����о��쾀׃խ��Ό�(d��o)����sС���Ű�������γɵģ��Լ��ڌ���ϵ�y(t��ng)�������c�ӕr��Ӱ푡���ϵ��������t�K�����ֱ����M�з�������B������γ������겢���Ͳ����ֱ��ʡ�