ժҪ:��M��C�����ԄӴa��C��ɲ�ͬ��ͺ�Ҏ����b�����ԄӴa��Cϵ�y���IҪ��, �����һ�N���͵ęC�����ԄӴa��C���ĩ�ˈ��������OӋ������ԓ�ԄӴa��Cϵ�y�������Ú����,ͨ�^�A�֙C����ץȡ�C���������C��,���F����b�����бP�Լ��|���ȵĊA�֡�ץȡ�����ֵȄ������ڿ��w�����Ļ��A��,ͨ�^Ԕ���OӋ�����cӋ��,�����ĩ�ˈ������ĽY���OӋ,����SolidWorksܛ��ƽ�_�Ͻ�����ĩ�ˈ����������SCADģ��,����M���˚���x�ͺ͚��ϵ�y�OӋ��ԓĩ�ˈ������OӋ����,ӭ�����ԄӴa��Cϵ�y���H��r������,�������õđ���ǰ����
�F����I���F�������a����Ҏģ������Ʒ�N�����������a��ʽ,ʹ�ÙC�����ԄӴa��C�đ�������Խ��Խ��,���C���˹���������Ҫ��Ҳ�������,���HҪ��C�����ԄӴa��C����ٻ�����lչ,����Ҫ��C���˾߂�̎����N�aƷ������,���Fһ�C��aƷ��һ�C��P��һ�C�ྀ�Ĺ��ܡ�����Ŀ�ˌ�����ΑB���Y�����ߴ粻ͬ,�C�����ԄӴa��Cĩ�ˈ������ĽY���Լ���Ŀ�ˌ���IJ�����ʽҲ��ͬ,Ŀ�ˌ���һ�����Q,�t����Q������ĩ�ˈ�����,�����ԄӴa��Cϵ�y����ҲҪ�������ĸ���,�@���o���m���F����I���a�ĸ��ٻ�����Ʒ�N���������ĬF��P��ᘌ��@�N��r,�Y�χ��������P�I����о��F��,�о��OӋһ�N�C�����ԄӴa��C���ĩ�ˈ�����,������Q�P�I�㲿��,���Ɍ��F����ͬ�ΑB���Y���ͳߴ�İ��b�����R�e�Ͳ�����
1 ���w�����OӋ�c����
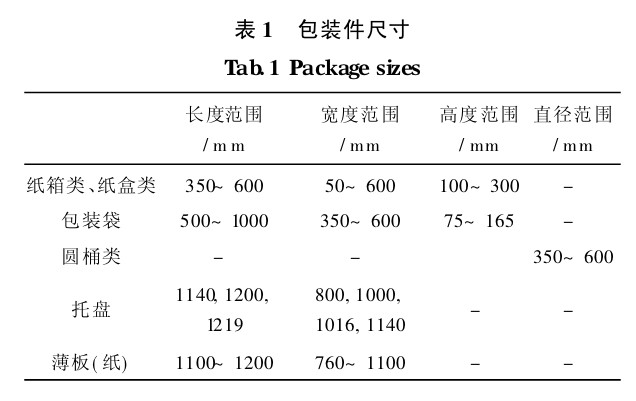
�C�����ԄӴa��C����ҕ�Xϵ�y�z�y���İ��b�����бP��Ŀ�˵����κͽY���ߴ����Ϣ,���f�oĩ�ˈ�����������,��ĩ�ˈ��������F�����Ͱ�����b�����бP�Ĺ�ˇ�����������b����ͼ������γߴ�l��׃���r,�C�����ԄӴa��C���D�Qĩ�ˈ������Ĉ��з�ʽ,���{�����ЙC������,��ɲ�ͬ���b���Ĝʴ_ȡ�����Ű�������ԓĩ�ˈ������m���İ��b�����γߴ�Ҋ��1��
���㼈��ͼ��е����Ξ������w�İ��b���m�ϲ��ÊA�ַ�ʽ,���b�����γߴ���|���^��r,���ÊA���еĽM�Ϸ�ʽ��Ͱ��b��ֱ�����|���^С�r,���ÊA�ַ�ʽ, �^��r�ɲ��ÊA���еĽM�Ϸ�ʽ������b�����^����ƽ�����^����ܛ,�m�ϲ���ץȡ�ķ�ʽ���бP�|����|���|����ܛ�p��,�m�ϲ������ַ�ʽ���бP�ߴ��^��, ����䁰�֮�g���g϶,���m���ÊA�ֻ����ֵķ�ʽ,���бP�в��,������צ�Ϳ��Ժ�����ץס������ڂ����߅�塣�A�ք������ɚ�ס�Һ���ס��X݆�X�l���z�ܻ���ͬ��������2�K�A�匍�F;���ք�������������P���F,���P�Ƿ�������늴��y����;����b�����бP��ץ���ń���,�����Ú�Y�ψ��ЙC������צ�a�������gЪ�[��,���Ɍ��F��צ�]�Ϻ͏��_��
���^���������^�;C��,�����һ�N�������㼈���Ͱ�����бP�ęC�����ԄӴa��Cĩ�ˈ������Y������,������Q�P�I�㲿��,���ɿ����D�Q���{����ͬ�Ĉ��ЙC�����m����ͬ��͡���ͬ�ߴ�İ��b��,�����Fȡ�Ų��������w�a��Cϵ�y�Cе�Y������Ҋ�D1��
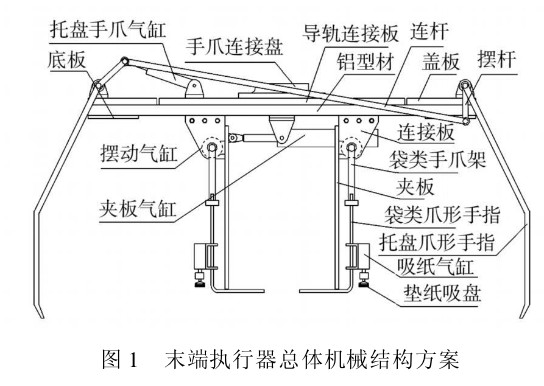
ԓĩ�ˈ�������Ҫ�ɊA�֙C����ץȡ�C���������C���M��,�����������Ͱ��b���ĊA�����Ű�,�|��(��|��)������,����b���ĊA����ץ�����Ű�,�бP��ץ�P���űP�Ȅ�����
2 �Y���OӋ
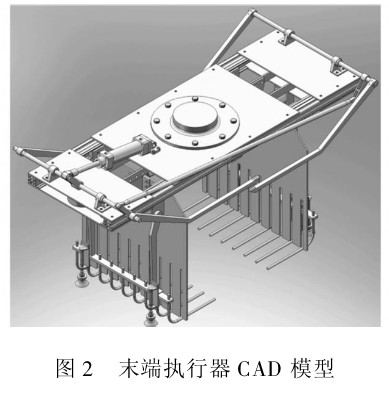
�ڌ����������M���OӋ�c�����Ļ��A��,��ԓ�C�����ԄӴa��Cĩ�ˈ������M����Ԕ���ĽY���OӋ,��SolidWorksܛ��ƽ�_�Ͻ����˽M��ԓĩ�ˈ������������㲿�������SCADģ�ͼ��b��ģ��,Ҋ�D2��
2.1 �A�֙C��
ԓ�C����Ҫ�ɊA�塢�B�Ӱ塢�X�Ͳġ�U�λ�܉�����K��ͬ����݆��ͬ�����Լ���M�ɡ�U�λ�܉���b���X�ͲĂ���,���K��U�βۃȻ���,�A��ͨ�^�B�Ӱ��c���K�B����һ��,�A����Ͳ���b���X�Ͳ��·�,�����Uͨ�^�_���c��ȊA���B�ӡ��������U�s�ؕr,�τ���ȊA��������܉�����Ƅ�,ͨ�^ͬ���X�Ύ������҂ȊA�������Ƅ�,ʹ2�K�A�忿��,���F�A�ք������ɚ�Դ�͚���ṩ�����S����,�_���A��a�����ĊA�o������֮�����U���,ʹ�A�����_���b��,��ɰ��b���Ĵa�š�
2.2 ץȡ�C��
ԓ���ĩ�ˈ�����̎������b�����бP�r,��������צץȡ,���ڲ���������Ͳ�ͬ,��צ�ĽY��������ʽҲ������ͬ��
2.2.1 �����צ
����b�����w�^����ܛ,���ץȡ�r,��צ�����j�������ӡ������צ��Ҫ��צ����ָ����צ�ܡ��~Ƭʽ�[�Ӛ�M�ɡ��[�Ӛ�������S�c��צ�ܹ��B,���s�՚����~Ƭ���������S���D���D,���F��צ���ϵ�צ����ָ���_���]�ϡ���ʹ�����צ�����ץȡ��ͬ���ȵİ��b��,��2�������צ�քe�� ���b���� PACKAGINGENGINEERINGVol.32No.72011.0482�b������2�K�A����,�S���A��������Ƅ�,��צ�g��Ҳ�S֮׃�����m�����b�����ȵ�׃����ͬ�r,�ڴ����צץȡ���ӕr,�A�����λ�͊A��������,��ֹ������
2.2.2 �бP��צ
�бP�ߴ��^��, ��߅��һ���в��,���,��߅��ץ���бP�����ס��бP��צ��Ҫ��צ����ָ����צ�S���[�U���B�U����ȽM�ɡ�������Uͨ�^�B���^�c�[�U�q����һ��,�[�U��צ����ָ�����b����צ�S��,��_���бPצ����ָ��ͬ�r���_�c�]��,���÷�ƽ����߅���B�U�C��,�ɂȵ�צ����ָͨ�^�B�U�B������,Ҋ�D3��
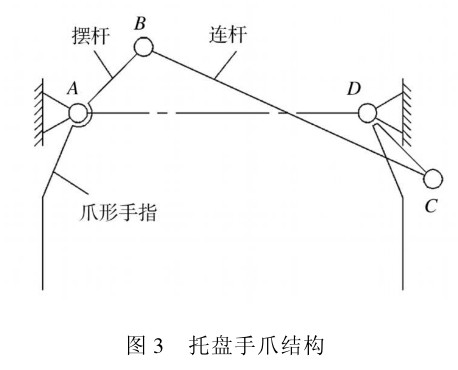
��������U����r,�Ӕ[�UAB����һ�ȵ�צ����ָ��r��D��,�[�UABͨ�^�B�UBC�Ӕ[�UCD������һ�ȵ�צ����ָ��형rᘷ����D��,���F��צ����ָ�������ץ�o�бP����֮������U�s�ؕr,צ����ָ�t���_��2.3 �����C��
ԓ�����C������������P��ס�|����,����������бP�ϡ�����γɷ�����Ҫ����ձ�ʽ������ؓ��ʽ�͟o��Դʽ3�N,������ձ�ʽ��Ҫһ������O��,�ɱ��^��,������ؓ��ʽֻ��՚≺�s�C���ɷ��㌍�F��ԓ�C����Ҫ����հl���������P��늴��y����ȽM��,���P���b������������U��,����װ��b�ڴ����צ�ϡ������P��Ҫ��ȡ�|����|��r,�[�Ӛ���Ӵ����צ�[������ֱλ��,����������U���,�����P�½�,��հl�����ܿڇ�����ى��s�՚�,ʹ���P�Ȳ��a�����,���P��ס�|��(��|��)���C���ˎ���ĩ�ˈ��������|��(��|��)�������бP�Ϻ�,���s�՚���_,���P�Ȳ������ʧ,����������U�s��,���P�ص�ԭλ,�����צ�[�Ӛ������צ�[�س�ʼλ�á�
3 ���ϵ�y�OӋ
ԓ�C�����ԄӴa��Cĩ�ˈ����������^�麆��,���Ú���Ӻ������Fݔ���������ٶȵ��{��,���,���Ј��ЙC���Ą��������Ú���ӡ������ϵ�y�OӋ�ĺ����c��ֱ��Ӱ푵�ĩ�ˈ������Ĺ������ܡ��ɿ��ԡ��|���Լ��ɱ��ȡ�
3.1 ����x��
���ԄӴa��Cϵ�y(http://www.cartonpacker.cn/)�a�����I�^����,��ײ��HҪ�ӈ��ЙC���a������ֱ���\�Ӻ����͔[��,߀��Ҫ�ṩ����ݔ�����Դ_���Aס��ץס���b��������,ĩ�ˈ������ڰ��\�^���Юa���đT�������x����Ҳ���ɺ�ҕ,���Ҳ��횿˷��@����ؓ�d,���,����x�ͱ�횾C�Ͽ��]���τ����W���ء�
�A�����ӊA��������܉����,���A�o���b��,�C��������ĩ�ˈ��������Dһ���ǶȺ���°��b�������,�A���ױ�횿˷���܉��Ħ���������b���������Լ��A��Ͱ��b�����D�r�a�����x�����͑T�������бP��צ������бPצ����ָ���_,ץ�o�бP,���Dһ���Ƕȷ����бP,���,�бP��צ��ױ�횿˷��бP�������������צ�[�Ӛ���Ӵ��צ����ָ�[��һ���Ƕ�,ץס���b��,�C��������ĩ�ˈ��������Dһ���ǶȺ�,��ָ���_���°��b��,���,�����צ��ױ�횿˷����b���������������ԊA���מ����f���x��Ӌ�㡣
3.1.1ؓ�dӋ��
1)Ħ���������K�ڻ�܉�л��ӕr,����֮�g�ɝL��a���L��Ħ����,�O�L��Ħ��ϵ����=0.05,��֪�A���|����s��m1=m2=12kg,���b������|����m=50kg,�t�A�����ӊA���Ƅӕr��˷���Ħ������:F�L��=(m+m1+m2)g=36.26N
2) �A�o�������A��Aס���b���r,�A��Ͱ��b��֮�g���oĦ����,ԓĦ���������ڻ���ڰ��b������,���С�c�A��ĊA�o��������,�O�A���c���b�����oĦ��ϵ���� 1=1,�t�A��a���ĊA�o����:N=mg/1=490N���A��Ҫ�Aס50kg�İ��b���r,����S��ݔ�������ٞ�245N��
3)�x�����͑T���������A��Aס���b����,�C�����ԄӴa��C��ĩ�ˈ�������ɰ��\�ʹa�ń���,���@���^����,ĩ�ˈ�����Ҫ����ԙC�����������Ğ���D���ĵ����D�\���Լ��������Ğ���D���ĵ����D�\��,��ˊA���ױ�횿˷����b���͊A�����D�r�a�����x�����͑T��������ȊA��Ͱ��b������Ҋ�D 4,F1,F2�քe����ȊA��Ͱ��b�������������S��1�a�����x����,F3��F4�քe����A��Ͱ��b�����������S��2�a�����x�����͑T������
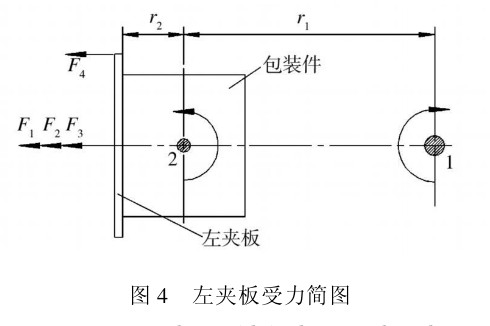
�O���b��������γߴ��600mm400mm300mm,����|����50kg,�D4��r1=2.8m,r2=0.2m��ĩ�ˈ������@�S1���S2���D�������ٶȺ����Ǽ��ٶȷքe�O��1=2rad/s,1=6.8rad/s2,2=4rad/s,2=25rad/s2[2], �t:F1=m1(r1+r2)12=144NF2=mr112=560NF3=m1r222=38.4N����SolidWorks��ģ���|�����Է�������,��֪���b���@�S2���D�đT�Ծ؞�I2=2.1665kgm2,�t���b���@�S2���D�r�a���đT������:F4=I222r2=2.16652520.2=135.4N��ȊA�����ܵ��������ӑBؓ�d,���A�����ܵ����S��ؓ�d��:Fdmax=F1+F2+F3+F4=877.8N3.1.2�x��Ӌ�㽛�^���Ϸ�����֪,ĩ�ˈ���������ɰ��b���ĊA�֡����\�^����,�A������Ҫ�˷�����Ҫ�S��ؓ�d�NJA�o�����x�����͑T����,���,�����@2���S���d��֮���x��A������̖����֪�����������p=0.8MPa,�A��̎�ڊA�o��B�r, ����S��ؓ�d���o�Bؓ�d,ؓ�d���x=0.8,�t�����Փݔ������:F0=Fdmax+N=1403.5N�t�p���Ú����:D=4F0p=47.3mm���xȡ�p���Ú����50mm��
3.2 ���ϵ�y�D
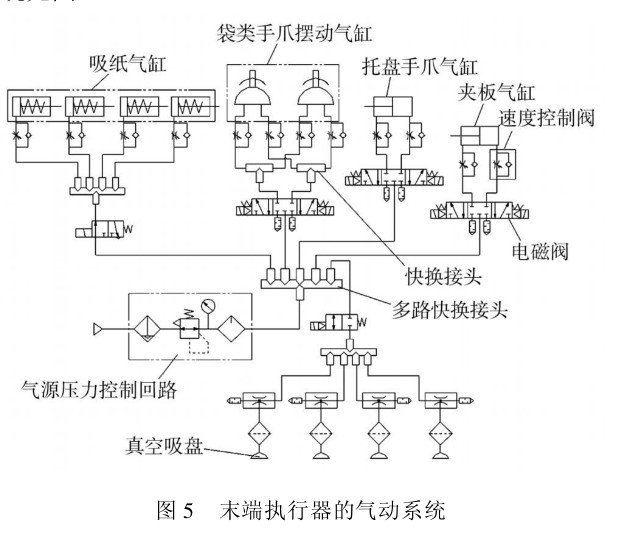
ԓĩ�ˈ�������1���A���ס�1���бP��צ��ס�2�������צ�[�Ӛ�ס�4����������Լ�4��������P,����2�������צ��מ�[�Ӛ��,���������ͨ�˜ʚ�ס��ڱ����ϵ�y��,���ډ|��(��|��)�|���^С,����������ƻ�·���^����,���Æ�늿؆����Ú�ס����˱��C����3�����Uݔ���ٶȵķ����Ժ������ąf�{��,��ӈ���Ԫ�����Î������_�P���p늿��p���Ú��,�������Ś⹝����ʽ�Դ_��������ݔ���ٶȡ��齵�ͳɱ�,�ڴ_����������r��,�������·�ʹ��ץȡ��·����1��늴��y�� 1~2����Q���^���Ӷ������ͬ�r�����ķ�ʽ���������·�ж�λ��ͨ늴��yͨ늕r��������������U���,��늕r�����U�����������s�ء���������P�Ƿ������|��(��|��)�Ɇ�늶�λ��ͨ늴��y���ơ����ץȡ��·���бPץȡ��·����Aȡ��·�е���λ��ͨ늴��y,ͨ늕r���ƚ�����U����c�s��,��늕r늴��y̎�����gλ��,ʹ������Uֹͣ������λ�á�ԓĩ�ˈ������Ě��ϵ�yҊ�D5��
4 �YՓ
ᘌ��F����I���a�Ķ�Ʒ�N���������ĬF���Ҫ��,�OӋ��һ�N���͵Ķ�ܙC�����ԄӴa��Cĩ�ˈ�����,ԓĩ�ˈ��������ýY�����Ρ��ɿ��Ըߡ�ʹ�É����L�Ě≺��,���ÊA�֙C����ץȡ�C�������֙C�����F�������������Ͱ��|��(��|��)���бP�Ȱ��b�����o����ĊAȡ��ץȡ����ȡ�����\�ʹa�ŵ��ԄӴa�����������,�бPץȡ�C�������˷�ƽ����߅�ΙC�����F�бP��צ���_��,�p���˚�ׂ��������m�����b���ߴ�Ҏ���׃��,ԓĩ�ˈ����������ҕ�X�������ʴ_�R�e���b�������γߴ��λ��,�Ԅ��{���A�֙C���A���g���ץȡ�C����צ�g�ࡣ�齵�ͳɱ�,ʹĩ�ˈ��������w�Y���o��,�A�֙C���ʹ��ץȡ�C���OӋ��һ�w,�ڴ����צץ���Ͱ��\�^����,�A����A���Ͷ�λ������,��ֹ�����F����ץ�����Ű��^����,�����צ���_���ɔ[�Ӛ���F,�[�Ӛ���нY���p�ɡ��[�ӽǶȿ��{���D���^��ȃ��c������ĩ�ˈ��������ϵ�y��������λ��ͨ늴��y,���C�ڊA�֡�ץȡ�r������U��ͣ���m��λ��,�_�����Ĺ�������,������ʽ�p���y�ɿ���ϵ�y�Ĺ�������,�S��ϵ�y�����������c���yĩ�ˈ��������,ԓ�C�����ԄӴa��C���ĩ�ˈ��������нY�����Ρ��·f���o��,�m�÷����V,���w���ȸ�,�|���^�p,�ɱ��͵ȃ��c,���m���F�������a����,�����^�õđ���ǰ����

