10A ā╔ŽÓ╗ņ║Ž╩Į▓Į▀MļŖÖC“īäėąŠŲ¼BY-5064
BY-5064╩Ūę╗┐ŅąĪą═╗»ĪóĖ▀╝ÜĘųĪóČÓ╣”─▄Īó╩╣ė├ĘĮ▒ŃĄ─ā╔ŽÓ╗ņ║Ž╩Į▓Į▀MļŖÖC“īäėąŠŲ¼Ż¼┼õ║Ž║åå╬Ą─═Ōć·ļŖ┬Ę╝┤┐╔īŹ¼FĖ▀ąį─▄Ą─“īäėļŖ┬ĘĪŻįōąŠŲ¼╠ß╣®64╝ÜĘųŻ¼▓╔ė├SOP-28ĘŌčbŻ©│▀┤ńŻ║18Ī┴10mmŻ®Ż¼═ŌĮė╣”Ę┼ļŖ┬Ę┐╔īŹ¼F“īäėļŖ┴„Ė▀▀_10AĪŻ
ę╗Īó╣▄─_Č©┴x
Č■Īó╣▄─_šf├„
|
╣▄─_ŠÄ╠¢ |
╣▄─_├¹ĘQ |
ī┘ąį |
╣”─▄šf├„ |
|
28 |
S0 |
öĄūųĪó▌ö╚ļ |
╝ÜĘųöĄ▀xō±Č╦Ż©ęŖ╝ÜĘųöĄ┐žųŲ▒ĒŻ® |
|
1 |
S1 |
öĄūųĪó▌ö╚ļ |
╝ÜĘųöĄ▀xō±Č╦Ż©ęŖ╝ÜĘųöĄ┐žųŲ▒ĒŻ® |
|
2 |
S2 |
öĄūųĪó▌ö╚ļ |
╝ÜĘųöĄ▀xō±Č╦Ż©ęŖ╝ÜĘųöĄ┐žųŲ▒ĒŻ® |
|
3 |
VCC |
öĄūųļŖį┤ |
ąŠŲ¼╣żū„ļŖį┤Ż©+5VŻ® |
|
4 |
UA |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
AŽÓHś“╔ŽČ╦┐žųŲČ╦ |
|
5 |
DA |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
AŽÓHś“Ž┬Č╦┐žųŲČ╦ |
|
6 |
UA- |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
AŽÓHś“╔ŽČ╦┐žųŲČ╦ |
|
7 |
DA- |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
AŽÓHś“Ž┬Č╦┐žųŲČ╦ |
|
8 |
UB |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
BŽÓHś“╔ŽČ╦┐žųŲČ╦ |
|
9 |
DB |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
BŽÓHś“Ž┬Č╦┐žųŲČ╦ |
|
10 |
UB- |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
BŽÓHś“╔ŽČ╦┐žųŲČ╦ |
|
11 |
DB- |
öĄūųĪó┤¾ļŖ┴„▌ö│÷ |
BŽÓHś“Ž┬Č╦┐žųŲČ╦ |
|
12 |
CPI |
öĄūųĪó▌ö╚ļ |
▓Į▀M├}ø_▌ö╚ļČ╦Ż¼Ž┬ĮĄčžėąą¦ |
|
13 |
RESET |
öĄūųĪó▌ö╚ļ |
ąŠŲ¼Å═╬╗Č╦Ż¼Ą═ļŖŲĮėąą¦ |
|
14 |
GND |
öĄūųĄž |
ļŖį┤Ąž |
|
15 |
U/D |
öĄūųĪó▌ö╚ļ |
ą²▐DĘĮŽ“┐žųŲČ╦ |
|
16 |
FREE |
öĄūųĪó▌ö╚ļ |
├ōÖC┐žųŲČ╦Ż¼Ą═ļŖŲĮėąą¦ |
|
17 |
JB |
─ŻöMĪóļpŽ“ |
BŽÓļŖ┴„Öz£y▌ö╚ļČ╦ |
|
18 |
PFDB |
─ŻöMĪó▌ö╚ļ |
BŽÓPFDš{╣Ø▌ö╚ļČ╦ |
|
19 |
RCB |
─ŻöMĪóļpŽ“ |
BŽÓöž▓©Ņl┬╩┐žųŲŻ©═ŌĮėRCŻ®Č╦ |
|
20 |
VCC |
─ŻöMļŖį┤ |
ąŠŲ¼╣żū„ļŖį┤Ż©+5VŻ® |
|
21 |
GND |
─ŻöMĄž |
ļŖį┤Ąž |
|
22 |
REF |
─ŻöMĪó▌ö╚ļ |
ļŖ┴„┤¾ąĪš{╣Ø▌ö╚ļČ╦ |
|
23 |
RCA |
─ŻöMĪóļpŽ“ |
AŽÓöž▓©Ņl┬╩┐žųŲŻ©═ŌĮėRCŻ®Č╦ |
|
24 |
PFDA |
─ŻöMĪó▌ö╚ļ |
AŽÓPFDš{╣Ø▌ö╚ļČ╦ |
|
25 |
JA |
─ŻöMĪóļpŽ“ |
AŽÓļŖ┴„Öz£y▌ö╚ļČ╦ |
|
26 |
SelectŻ©0Ż® |
öĄūųĪó▌ö╚ļ |
NC |
|
27 |
DOWN |
öĄūųĪó▌ö╚ļ |
░ļ┴„µiČ©═Ō▓┐┐žųŲČ╦Ż©ęŖ╦─Ż® |
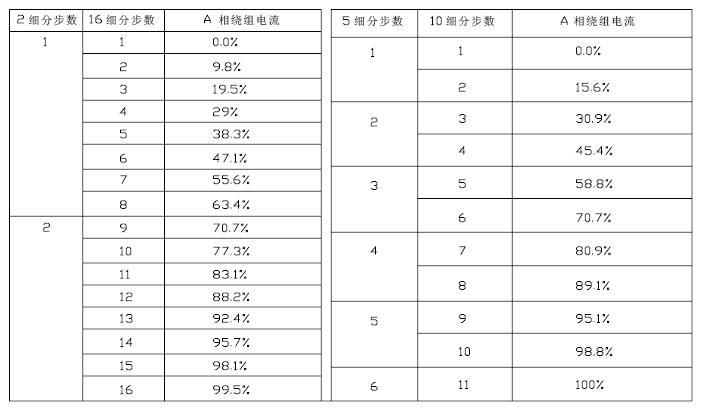
╚²Īó╝ÜĘųöĄ┐žųŲ
|
S[2Ż╗1Ż╗0] |
000 |
001 |
010 |
011 |
100 |
101 |
110 |
111 |
|
╝ÜĘųöĄ |
2 |
16 |
32 |
64 |
5 |
10 |
20 |
40 |
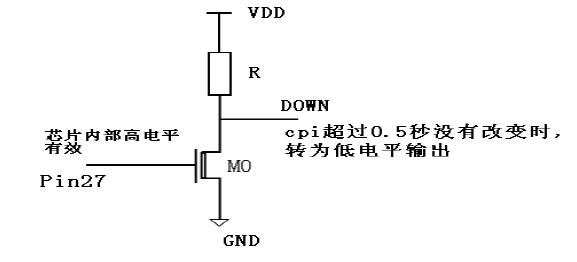
╦─Īó═Ō▓┐┐žųŲ░ļ┴„µiČ©Ż©ęįķ_┬®ĘĮ╩Į▌ö│÷downą┼╠¢Ż®
1Ż«ąŠŲ¼Ą─downą┼╠¢Ė▀ėąą¦Ż¼ų╗▌ö│÷ĪŻ
2Ż«cpiĄ─ų▄Ų┌ąĪė┌0.5├ļĢrąŠŲ¼Ą─downą┼╠¢ūā×ķ▀ē▌ŗĪ░1Ī▒▌ö│÷Ż¼Įė═Ō▓┐ļŖ┬Ę║¾Ż¼downą┼╠¢ėąą¦ĢrŻ¼ūā×ķ▀ē▌ŗĪ░0Ī▒▌ö│÷Ż¼Š▀¾wæ¬ė├ęŖŽ┬łDŻ║
╬ÕĪó╦ź£pĘĮ╩Į┐žųŲŻ©AĪóBŽÓ┐╔Ęųäeå╬¬Ü┐žųŲŻ®
|
┐žųŲļŖē║PFDA/PFDB |
╦ź£p─Ż╩Į |
|
PFDA<1.1V |
┐ņ╦┘╦ź£p─Ż╩Į |
|
PFDA>3V |
┬²╦┘╦ź£p─Ż╩Į |
|
1.1V |
╗ņ║Ž╦ź£p─Ż╩Į |
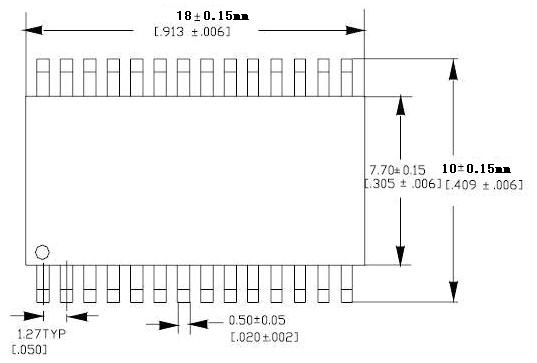
┴∙ĪóĘŌčbłD
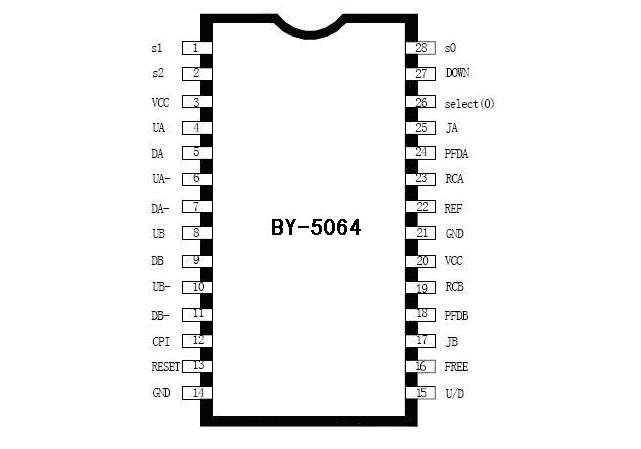
SOP-28ĘŌčb
╬ÕĪóBY-5064Ą─╩╣ė├šf├„
ūóŻ║Ż©▀@└’╝ÜĘųöĄų╗▀xė├╦─éĆ╝ÜĘųĀŅæB▀Mąąšf├„Ż¼ė├æ¶┐╔Ė∙ō■ąĶę¬░┤šš╔Ž╩÷╝ÜĘų▒ĒįOų├▀xō±Ż®ĪŻ
▀@╩Ūę╗┐ŅąĪą═╗»Ż¼ČÓ╣”─▄Ż¼ą¦┬╩Ė▀Ż¼╩╣ė├ĘĮ▒ŃĄ─ā╔ŽÓ╗ņ║Ž╩Į▓Į▀MļŖÖCīŻė├ļŖ┬ĘŻ¼┼õ║Ž║åå╬Ą─═Ōć·ļŖ┬Ę╝┤┐╔īŹ¼FĖ▀ąį─▄Ą─“īäėļŖ┬ĘĪŻ
1Īó╝ÜĘų▀xō±Ż║ā╔éĆ╣▄─_Ż©P2Ż¼P28Ż®┐╔▀xō±╦─éĆ╝ÜĘųĀŅæBŻ©ęŖ╝ÜĘųöĄ┐žųŲ▒ĒŻ®ĪŻ
2ĪóUAų┴DB-Ż©P4ų┴P11Ż®×ķŁhą╬Ęų┼õŲ„▌ö│÷Č╦Ż¼Ęųäe┐žųŲ“īäėļŖ┬ĘĄ─ŽÓą“Ż¼╚ńłDę╗
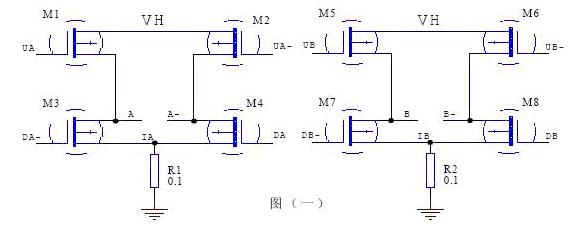
ŲõųąŻ¼DAĪóDA-ĪóDBĪóDB-×ķHś“Ž┬░ļś“┐žųŲČ╦Ż¼├┐Č╦ėą╝s20mAĄ─╦▓ķg“īäė─▄┴”Ż¼į┌▌ö│÷ļŖ┴„ąĪė┌2AĢrŻ¼┐╔ų▒Įė═Ųäė╣”┬╩╣▄ĪŻ
3ĪóCP2Ż©P12Ż®▌ö╚ļ├}ø_┐žųŲČ╦Ż¼ā╚▓┐ęč║¼ėą╩®├▄╠žė|░lŲ„ĪŻ
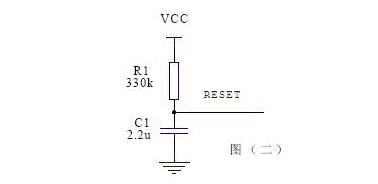
4ĪóRESETŻ©P13Ż®Å═╬╗Č╦Ż¼▒žĒÜ═ŌĮėRCÅ═╬╗ą┼╠¢Ż¼Ąõą═ųĄŻ¼R1=330KŻ¼C1=2.2UĪŻ
╚ńłDČ■
5ĪóU/DŻ©P15Ż®Ż¼š²ĪóĘ┤▐D┐žųŲČ╦ĪŻU/D=1ĢrŻ¼š²▐DŻ╗U/D=0ĢrĘ┤▐DĪŻā╚▓┐ęč║¼ėą╩®├▄╠žė|░lŲ„ĪŻ
6ĪóFREEŻ©P16Ż®Ż¼├ōÖCČ╦Ż¼Ą═ļŖŲĮėąą¦ĪŻFREE=1ĢrŻ¼ąŠŲ¼š²│Ż╣żū„; FREE=0ĢrŻ¼ąŠŲ¼▌ö│÷╚½▓┐×ķ┴ŃĪŻ▓╗ė├┤╦╣”─▄ĢrŻ¼┤╦Č╦┐╔ų▒ĮėĮėVCC
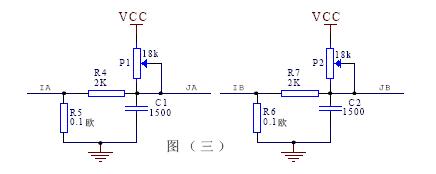
7ĪóJBŻ©P17Ż®Ż¼JAŻ©P25Ż®Ęųäe×ķAĪóBŽÓļŖ┴„▓╔śė┐žųŲČ╦Ż¼Ąõą═æ¬ė├×ķŻ║
Öz£yļŖūĶę╗░Ń×ķ0.12ÜWų┴0.20ÜW ×V▓©ģóöĄ×ķR=2KŻ¼C=1500PĪŻ
╔Ž└ŁļŖūĶ×ķ18Kū¾ėęŻ¼▒žĒÜūóęŌĄ─╩ŪŻ¼┤╦Č╦×ķļŖ┴„Š½┤_Öz£yČ╦Ż¼ī”Öz£yļŖūĶ╝░RC
×V▓©ļŖ┬ĘĄ─ģóöĄėąĘŪ│ŻŠ½┤_Ą─ę¬Ū¾Ż©╚ń1ĪļŠ½Č╚Ż®Ż¼▓óŪę┼cRĪóCĄ─▒╚└²ėąĻPĪŻę╗░ŃŪķørŽ┬Ż¼╬ęéā╩╣ė├Ą─į¬╝■▓╗─▄▀_ĄĮę¬Ū¾Ż¼Å─Č°Ģ■ę²ŲąŠŲ¼ā╚▓┐▀\╦ŃĘ┼┤¾Ų„Ą─╩¦š{Ż¼įņ│╔┐žųŲ▓©ą╬Ż¼ė╚Ųõ╩Ū╝ÜĘųĀŅæBŽ┬Ą─ļA╠▌▓©Ą─▓©ą╬Ų½ęŲĪŻ┤╦ĢrļŖÖCĢ■│÷¼F▓ĮŠž▓╗Š∙ä“Ż¼įļę¶┤¾Ą╚¼FŽ¾ĪŻĮŌøQ▀@ę╗å¢Ņ}Ą─ĘĮĘ©╩ŪŻ║Ž╚╣╠Č©Öz£yļŖūĶ╝░×V▓©ļŖ┬ĘųąRĪóCĄ─ųĄŻ¼▓╗▒ž┐╝æ]Š½Č╚Ż¼░č▀@▓┐Ęų«öū„š¹¾w▌ö╚ļŻ¼▀@Ģrų╗ąĶš{╣Ø╔Ž└ŁļŖūĶP1Ż¼P2Ż¼ė├╩Š▓©Ų„▒OęĢļŖūĶ╔ŽĄ─▓©ą╬Ż©╝┤ąŠŲ¼ā╚▓┐ęčįOČ©Ą─Ą─▓©ą╬Ż®š{ų┴ś╦£╩Ą─š²Žę▓©╝┤┐╔ĪŻ╚ńłD╚²
ś╦£╩▓©ą╬Ż║
8ĪóPFDBŻ©P18Ż®ĪóPFDAŻ©P24Ż®Ż║╦ź£pĘĮ╩Į┐žųŲČ╦ĪŻ ę╗░ŃĮ©ūh×ķŻ║╝ÜĘųĀŅæBŽ┬ė├┐ņ╦ź£pĘĮ╩ĮŻ¼╝┤įOČ©PFDB=0Ż¼PFDA=0ĪŻ┤╦ĢrļŖÖC╝ÜĘų▓ĮŠžŠ∙ä“Ż¼▀\ąąŲĮĘĆĪŻĘ±ätš±äė▌^├„’@ĪŻ
▓╗╝ÜĘųŻ©╝┤1/2▓ĮŻ®ĢrŻ¼Į©ūhė├┬²╦ź£pĘĮ╩ĮŻ¼┤╦ĢrļŖÖC░l¤ßąĪŻ¼¤oįļę¶ĪŻ
9ĪóRCBŻ©P19Ż®ĪóRCAŻ©P23Ż®Ż║öž▓©Ģrķgš{š¹Č╦ĪŻ╚ńłD╦─
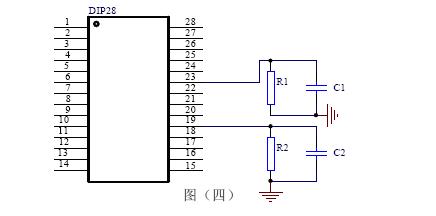
Ąõą═æ¬ė├×ķŻ║
R1=20Kų┴40K C1=1500P Ż╗ R2=20Kų┴40K C2=1500P
┤╦RĪóCģóöĄøQČ©öž▓©Ņl┬╩
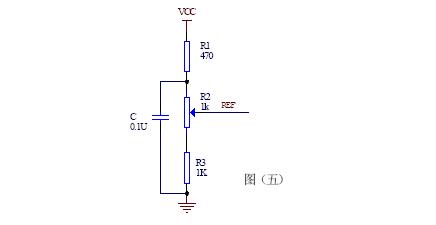
ę╗░ŃĮ©ūh×ķŻ║╝ÜĘųĀŅæBŽ┬Ż©╝┤┐ņ╦ź£pĘĮ╩ĮŽ┬Ż®Ż¼R1=R2=20KŻ¼C1=C2=1500P
▓╗╝ÜĘųĀŅæBŽ┬Ż©╝┤┬²╦ź£pĘĮ╩ĮŽ┬Ż®Ż¼R1=R2=33KŻ¼C1=C2=1500P
10ĪóREFŻ©P22Ż®Č╦Ż║ļŖ┴„įOČ©Č╦ĪŻ┤╦Č╦ļŖ╬╗įOČ©Ą─┤¾ąĪų▒ĮėøQČ©“īäėś“ļŖ┴„Ą─┤¾ąĪĪŻ R1ĪóR3×ķļŖ╬╗ļŖūĶŻ¼R2×ķļŖ╬╗Ų„Ż¼š{╣ØR2┐╔ų▒ĮėĖ─ūāįOČ©ļŖ┴„ĪŻ╚ńłD╬Õ