|
▒█Č╦▒ŻūoŽĄĮy (EOAS) ┐╔į┌╣żŠ▀ģ^ė“īŹ¼FĘŪĮėė|╩ĮĄ─╚╦ÖCģfū„Ż¼▒ŻšŽ╚╦åT░▓╚½

MICHAEL KASPAR
SICK AG ╣żśIé„Ėą«aŲĘĮø└Ē
į┌╚╦┼cÖCŲ„╚╦ģf═¼ū„śIĄ─ł÷Š░ųąŻ¼×ķ▒▄├Ō╚╦åT╩▄é¹Ż¼▒žĒÜ▓╔╚Ī╠ž╩ŌĄ─░▓╚½┤ļ╩®ĪŻĄ½▀@═©│ŻęŌ╬Čų°▓╗Ą├▓╗ū÷│÷║▄ČÓ═ūģfŻ¼Å─Č°╩╣Ą├įŁ▒ŠŽŻ═¹╠ß╔²ą¦┬╩Ą─ģfū„ĮŌøQĘĮ░ĖĘ┤Č°ūāĄ├ø]ėą╬³ę²┴”ĪŻ¼Fį┌Ż¼SICKĦüĒĄ─ę╗ĒŚäōą┬╝╝ągėą═¹Ė─ūā▀@ę╗¼FĀŅĪŻ
“ĘŪĮėė|”š²╩Ū▀@ĒŚą┬╝╝ągĄ─ĻPµI╦∙į┌Ż¼ę▓╩ŪSICK═Ų│÷įō╚╦ÖCģfū„(HRC) ░▓╚½ĮŌøQĘĮ░Ėį┌╚½Ū“ĘČć·ā╚Š▀ėąäōą┬ęŌ┴xĄ─║╦ą─ā×ä▌ĪŻ“æ{ĮĶEOASŻ¼╬ęéā┐╔ęįė├╚½ą┬Ą─ĘĮ╩Į▒ŻšŽ╚╦ÖCģfū„Ą─░▓╚½ąįĪŻ”SICK╣żśIé„Ėą«aŲĘĮø└ĒMichael Kaspar▒Ē╩ŠĪŻ
Ž╚═╦ę╗▓ĮüĒ┐┤é„ĮyĘĮĘ©Ż║─┐Ū░Ż¼ę¬▒ŻšŽ╚╦åTį┌┐┐Į³ÖCŲ„╚╦ĢrĄ─░▓╚½Ż¼ų„ę¬ę└┐┐Ą─╩Ū——“╣”┬╩║═ąį─▄Ž▐ųŲ”Ż¼▀@╩ŪįSČÓģfū„ÖCŲ„╚╦▒Š╔Ē╦∙ā╚ų├Ą─╗∙ĄA░▓╚½ÖCųŲĪŻ┼õ║Ž║Ž└ĒĄ─æ¬ė├įOėŗŻ¼Ž▐ųŲÖCŲ„╚╦į┌┼÷ū▓░l╔·ĢrĄ─▌ö│÷╣”┬╩Ż¼┐╔ęįĘ└ų╣ī”╚╦¾wįņ│╔ć└ųžé¹║”Ż©╚ń÷é¹Ą╚Ż®ĪŻ╚╗Č°Ż¼āH┐┐╣”┬╩Ž▐ųŲ▓ó▓╗ūŃęį═Ļ╚½▒ŻšŽ░▓╚½ĪŻĮėė|├µĘe═¼śė╩Ūė░Ēæ░▓╚½ąįĄ─ę╗éĆĻPµIę“╦žĪŻ╝┘╚ńĮėė|├µĘe║▄ąĪŻ¼▒╚╚ń╣żŠ▀╗“╣ż╝■Ą─õJĮŪ▀ģŠēŻ¼╝┤╩╣╣”┬╩║▄Ą═Ż¼ę▓┐╔─▄«a╔·│¼▀^╚╦¾w─│ą®ģ^ė“Ż©╚ń╩ų▓┐Īó╩ų▒█Ą╚Ż®╚▌įSĄ─ē║┴”Ž▐ųĄŻ¼Å─Č°įņ│╔ć└ųžé¹║”ĪŻ×ķĮĄĄ═▀@ĘN’LļUŻ¼═©│ŻąĶę¬┤¾Ę∙ĮĄĄ═ÖCŲ„╚╦Ą─▀\ąą╦┘Č╚Ż¼▓ó▒M┴┐▒▄├Ō╣żŠ▀║═╣ż╝■╔Ž┤µį┌ąĪČ°╝ŌõJĄ─Įėė|▓┐╬╗ĪŻĄ½▀@═∙═∙ęŌ╬Čų°æ¬ė├ą¦┬╩Ą─ĮĄĄ═║═│╔▒ŠĄ─╠ßĖ▀Ż¼Å─Č°╩╣╩¦╚ź┴╦ÖCģfū„Ą─╬³ę²┴”ĪŻ
ę“┤╦Ż¼║▄ČÓŲ¾śIūŅĮKĘ┼Śē╚╦ÖCģfū„Ą─ĮŌøQĘĮ░ĖŻ¼Č°╩Ū▓╔ė├é„ĮyĘĮ╩Įī”ÖCŲ„╚╦▀MąąĘŌķ]╩ĮĘ└ūoŻ¼▒╚╚ń╩╣ė├Ę└ūoÖ┌╗“╝ż╣ŌÆ▀├ĶāxĪŻĄ½▀@ą®ĘĮĘ©▓╗āHš╝ė├▌^┤¾Ą─▄ćķg┐šķgŻ¼Č°ŪęĢ■ŅlĘ▒ė|░l═ŻÖCŻ¼ć└ųžė░Ēæ«a─▄ĪŻ

Č°Ūę“▀@ą®░▓╚½Ę└ūo┤ļ╩®į┌īŹļHæ¬ė├ųąŻ¼š╝ė├Ą─░▓╚½┐šķg═∙═∙▀h│¼Ųõ▒žę¬ĘČć·Ż¼Å─Č°┤¾Ę∙į÷╝ė┴╦│╔▒ŠĪŻ” Michael KasparųĖ│÷Ż¼“░▓╚½ĮŌøQĘĮ░Ėæ¬╩╝ĮK┼cŠ▀¾wæ¬ė├╦∙ĦüĒĄ─’LļUŽÓŲź┼õĪŻ”╚╗Č°Ż¼į┌┤╦ų«Ū░Ż¼▀mė├ė┌╚╦ÖCģfū„Ą─║Ž▀m░▓╚½ĮŌøQĘĮ░Ėę╗ų▒╠Äė┌┐š░ūĀŅæBĪŻ“į┌║▄ČÓŪķørŽ┬Ż¼▀@ęŌ╬Čų°ŽÓĻPĒŚ─┐¤oĘ©░┤įŁėŗäØīŹ╩®Ż¼ī¦ų┬─│ą®┴„│╠Łh╣ؤoĘ©īŹ¼Fūįäė╗»Ż¼╗“š▀┤¾Ę∙═ŲĖ▀┴╦ūįäė╗»Ą─īŹ╩®│╔▒ŠĪŻ”
SICKė┌2024─Ļ─®═Ų│÷Ą─EOASäōą┬æ¬ė├īŻ×ķĮŌøQ▀@ę╗ļyŅ}Č°įOėŗŻ¼ėą═¹ÅžĄūĖ─ūā╚╦ÖCģfū„Ą─Ė±ŠųĪŻįōčbų├ų▒Įė░▓čbė┌ÖCąĄ▒█─®Č╦Ż¼─▄į┌ÖCŲ„╚╦╣żŠ▀/╣ż╝■ģ^ė“Ž┬ĘĮ╔·│╔ę╗éĆÕFą╬äėæB▒Żūoģ^ė“ĪŻ└²╚ńŻ¼╚ń╣¹▓┘ū„╚╦åTĄ─╩ų▀M╚ļ┤╦▒Żūoģ^Ż¼ŽĄĮyĢ■┴ó┐╠Öz£yĄĮ▓ó┴ó╝┤═Żų╣ÖCŲ„╚╦äėū„Ż¼Å─Č°į┌┼÷ū▓░l╔·Ū░Š═īŹ¼FĖ╔ŅAĪŻ▀@ĘNĘŪĮėė|╩ĮĄ─░▓╚½Ę└ūoÖCųŲ╩Ūę╗ĒŚ╚½ą┬═╗ŲŲĪŻEOASĄ─▒Żūoģ^ė“Ģ■ļSų°ÖCŲ„╚╦▀\äėČ°äėæBš{š¹Ż¼Ųõ│▀┤ńįOėŗŠ½£╩Ż¼āHį┌┤µį┌ų▒Įė╬ŻļUĢr▓┼Ģ■ė|░lÖCŲ„╚╦═Żų╣ĪŻōQčįų«Ż¼EOAS╩Ūī”ÖCŲ„╚╦ā╚Į©Ą─╣”┬╩/ąį─▄Ž▐ųŲÖCųŲĄ─ėą┴”ča│õŻ¼╠Ņča┴╦╚╦ÖCģfū„ųąķLŲ┌╚▒╩¦Ą─ĘŪĮėė|╩Į░▓╚½╣”─▄ĪŻ
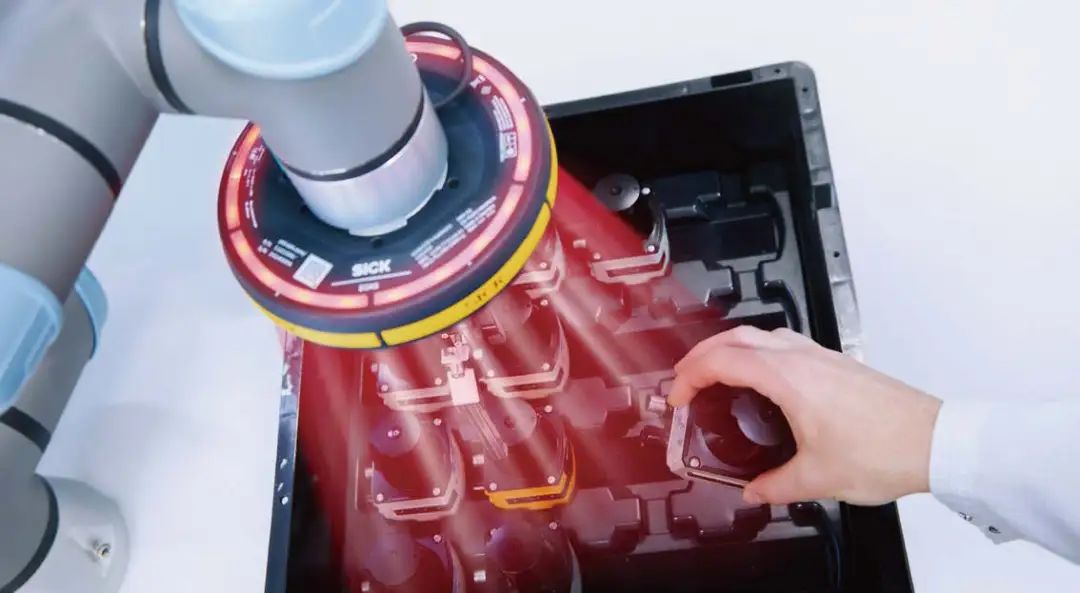
Ė∙ō■¼Fł÷Ūķør▓╗═¼Ż¼EOAS┐╔į┌Öz£yĄĮ▒Żūoģ^ė“ā╚ėą╬’¾wĢr┴ó╝┤═Żų╣ÖCŲ„╚╦äėū„ĪŻę╗Ą®▒Żūoģ^ųžą┬ŪÕ┐šŻ¼ÖCŲ„╚╦▒Ń─▄ūįäė╗ųÅ═▀\ąąĪŻ
SICK┼cā×░┴ÖCŲ„╚╦ (Universal Robots) ├▄Ūą║Žū„Ż¼┬ō║Žķ_░l┴╦EOASŽĄĮyĪŻļpĘĮ×ķ┤╦Į©┴ó┴╦ą┬Ą─Įė┐┌Ż¼╩╣EOAS─▄ē“╔ŅČ╚╝»│╔ų┴ÖCŲ„╚╦Ą─▓┘ū„ŽĄĮyųąĪŻę“┤╦Ż¼įōŽĄĮy┐╔ų▒ĮėĮĶų·ęčėąĄ─░▓╚½┐žųŲŲ„╗∙ĄA╝▄śŗ▀\ąąŻ¼š¹¾wĮŌøQĘĮ░ĖśO×ķŠ½║åĖ▀ą¦ĪŻ─┐Ū░Ż¼EOASŽĄĮyāH╝µ╚▌ā×░┴Ą─ÖCŲ„╚╦Ż¼Ą½╬┤üĒīó═žš╣ų┴Ė³ČÓŲĮ┼_ĪŻ─┐Ū░ęčėąČÓ╝ę┐═涚²į┌▀MąąīŹļHæ¬ė├£yįćĪŻ
EOASĄ─įOų├║═▓┘ū„╩«Ęų║åå╬ų▒ė^Ż║ė├æ¶┐╔═©▀^īŻė├APP (“EOAS URCAP”)║═ÖCŲ„╚╦ūįĦĄ─╩ŠĮ╠├µ░Õ (Teach Panel) ┐ņ╦┘═Ļ│╔┼õų├┼cåóė├ĪŻ
▓╗āH╚ń┤╦Ż║EOAS▀Ć’@ų°║å╗»┴╦╚╦ÖCģfū„æ¬ė├Ą─░▓╚½“×ūC┴„│╠ĪŻļm╚╗į┌┐╔─▄░l╔·┼÷ū▓Ą─╬╗ų├╚įąĶ▀Mąą╣”┬╩┼cē║┴”£yįćŻ¼ęįūC├„Ę¹║Ž░▓╚½ķōųĄŻ¼Ą½ė╔ė┌ŽĄĮyā╚ų├Ą─▒Żūoģ^ęč║Ł╔w┴╦┤¾▓┐ĘųĖ▀’LļUģ^ė“Ż¼£y┴┐³cöĄ┴┐’@ų°£p╔┘Ż¼śO┤¾Ąž║å╗»┴╦║ŽęÄ“×ūCĄ─▀^│╠ĪŻ
«ö╚╗Ż¼EOAS▀ĆŠ▀ėąĖ³ČÓā×ä▌Ż║1) ė╔ė┌ÖCŲ„╚╦į┌┼c╚╦Įėė|ų«Ū░Š═ęčĮø═Żų╣äėū„Ż¼ę“┤╦ŽÓ▒╚─Ūą®āHę└┘ćé„Įy╣”┬╩║═ąį─▄Ž▐ųŲÖCųŲĄ─æ¬ė├Ż¼▓╔ė├EOASĄ─ŽĄĮyš¹¾w▀\ąą╦┘Č╚═©│ŻĖ³┐ņŻ╗2) EOAS¤oąĶš╝ė├Ņ~═ŌĄ─░▓čb┐šķgĪŻ
š²╚ńMichael Kaspar╦∙čįŻ║“╦∙ėą▀@ą®ā×ä▌╩╣Ą├EOAS│╔×ķę╗éĆśOŠ▀╬³ę²┴”Ą─░▓╚½ĮŌøQĘĮ░ĖŻ¼×ķšµš²īŹ¼FÅVĘ║Ą─╚╦ÖCģfū„┤“ķ_┴╦╚½ą┬┐╔─▄——▓╗āHāHŠųŽ▐ė┌─│ą®╠žČ©ł÷Š░Ż¼Č°╩Ū▀mė├ė┌š¹éĆąąśIŅIė“ĪŻ”

ų╗ąĶ╚²éĆ▓Į¾EŻ¼╝┤┐╔═Ļ│╔ų▒ė^Ą─░▓╚½┼õų├Ż║1) įOų├IPĄžųĘŻ╗2) Č©┴x▒Żūoģ^ė“Ą─ķLČ╚Ż╗3) ė¢ŠÜ“×ūC³cĪŻ
SICK
? ³cō¶Ž┬ĘĮęĢŅl╠¢ ×gė[Ė³ČÓęĢŅl ?

|

