|
1 ę²čį
é„ĮyĄ─░³čbÖCąĄČÓ═©▀^Å═ļsĄ─²X▌åĪó┬ōŚUé„äėĪŻ┤µį┌ÖCąĄ╝ė╣żÅ═ļsĪóŠ½Č╚ę¬Ū¾Ė▀Ż¼░▓čbš{įćĘ▒¼ŹŻ¼ÖCśŗ±Ņ║Žš`▓Ņ┤¾Ż¼╔·«aų▄Ų┌ķLĄ╚Ą─├„’@╚▒³cĪŻŲõ┐žųŲĄ─╦┘Č╚║═Š½Č╚Č╝╩▄ĄĮę╗Č©Śl╝■Ą─ųŲ╝sĪŻ
ßśī”é„ĮyÖCąĄŽĄĮyĄ─╚▒³cŻ¼▓╔ė├ķ_Ę┼╩ĮĄ─▀\äė┐éŠĆą═DVP-10MC▀\äė┐žųŲŲ„Ż¼╩╣ė├ļŖūė═╣▌åĄ╚Ž╚▀M╣ż╦ćŻ¼▒ŻūCš¹ÖCĄ─═¼▓Įģfš{╣żū„Ż¼īŹ¼FŠ½┤_ĪóĖ▀╦┘┐žųŲĪŻDVP-10MC▀\äė┐žųŲŲ„į┌┤╦ĘĮ├µ▒Ē¼F┴╦┴╝║├Ą─ąį─▄ĪŻ
2 ŽĄĮy╣ż╦ć║åĮķ
┼P╩Į░³čbÖC╩Ū╬’┴Ž│õ╠Ņ┼c┤³ūė│╔ą═čž╦«ŲĮĘĮŽ“▀MąąŻ¼ė╔ė┌╦«ŲĮ╩ĮųŲ┤³Īó│õ╠Ņ║═ĘŌ┐┌Ż¼Ė„éĆ╣ż╬╗Š∙┐╔ęįĘĮ▒ŃĄž▀Mąąš{š¹Ż¼▓ó┐╔ęįßśī”▓╗═¼Ą─╬’┴ŽŪķørū„įSČÓÅ═ļsĄ─┼õų├ūā╗»ĪŻ
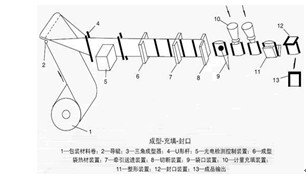
łD1 ┼P╩Į░³čbÖC
łD2 ╣ż╦ć┴„│╠łD
┼P╩Į░³čbÖCĄ─╣ż╦ć×ķŻ║Å─ŠĒ═▓1└Ł│÷Ą─░³čb▓─┴Žė╔ī¦▌ü2ī¦ę²Ż¼Įø╚²ĮŪ│╔ą═Ų„3║═Uą╬ŚU4Č°š█║Ž│╔Uą╬─żŻ╗╣ŌļŖÖz£yčbų├5ī”░³čb▓─┴Ž╔ŽėĪ╦óĄ─╔½ś╦└ŁŠÓ▀MąąÖz£y║═╦═▀M┐žųŲŻ¼╚╗║¾ė╔ųŲ┤³¤ßĘŌčbų├6ī”Uą═š█║Ž─żīŹ╩®¤ß╚█ĘŌĮėŻ¼ĘŌĮėā╔é╚├µ═Ļ│╔ųŲ┤³ĪŻĀ┐ę²╦═▀Mčbų├7ū„ķgöÓåó═Żą²▐D▀\äėīó│╔┤³╝░░³čb▓─┴ŽĀ┐ę²╦═▀MŻ¼├┐┤╬╦═ę╗éĆ┤³īÆĄ─ŠÓļxŻ¼ė╔ŪąöÓčbų├8▓├Ūą│╔å╬éĆ░³čb┤³Ż¼╚╗║¾ė╔┤³ŖA╦═▀Mčbų├ū„ŖA│ų╦═▀MŻ╗į┌ķ_┤³┐┌╣ż╬╗ė╔ķ_┤³┐┌čbų├īó┤³┐┌╬³ķ_Ż¼▓ó═∙┤³ā╚ćŖ┤Ąē║┴”┐šÜŌŻ¼╩╣┤³┐┌öUķ_Ż¼▓óė╔ŖA│ų░³čb┤³Ą─ŖA╩ų▒Ż│ųÅłķ_Ą─┤³┐┌Ż¼ęį╩╣│õ╠Ņ╬’┴ŽĒś└¹│õ╠ŅĪŻ«ö┤³ūė╦═ĄĮ│õ╠Ņ╣ż╬╗ĢrŻ¼═©▀^│õ╠Ņ┬®ČĘ═∙░³čb┤³ā╚čb╚ļ╬’┴ŽŻ¼į┘į┌š¹ą╬╣ż╬╗ė╔š¹ą╬čbų├ī”┤³ųą╦╔╔ó╬’┴ŽīŹ╩®š¹ą╬╠Ä└ĒŻ¼╩╣Ųõ┤³ą╬▒Ńė┌ĘŌ┐┌▓┘ū„Ż¼ŪęŖA┤³Ą─ŖA╩ųŽ“═Ō▀\äėŻ¼╩╣┤³┐┌╠Äė┌ŲĮų▒ķ]║ŽĀŅæBŻ¼į┌ĘŌ┐┌╣ż╬╗═Ļ│╔┤³┐┌ĘŌĮėŻ¼Ą├ĄĮĄ─░³čb«aŲĘÅ─ÖCŲ„║¾Č╦▌ö│÷ĪŻ
3 ĘĮ░ĖĮķĮB
DVP10MC╩Ū┼_▀_═Ų│÷Ą─ę╗┐Ņ┐éŠĆą═ČÓ▌S▀\äė┐žųŲŲ„Ż¼īŻķTė├ė┌┐žųŲ┼_▀_A2╦┼Ę■“īäėŲ„ĪŻDVP10MC┼cA2╦┼Ę■“īäėŲ„ų«ķg▓╔ė├CANopen¼Fł÷┐éŠĆ╝╝ąg═©ėŹŻ¼ūŅĖ▀═©ėŹ╦┘┬╩▀_ĄĮ1M bpsĪŻ╦³│²┴╦─▄īŹ¼FÅ═ļsĄ─▀\äė┐žųŲęį═ŌŻ¼▀Ć┐╔ęįīŹ¼FPLCĄ─▀ē▌ŗ┐žųŲŻ¼£žČ╚┐žųŲĪŻDVP10MC═©ėŹĮė┐┌žSĖ╗Ż¼╠ß╣®ėąEthernetĪóCAN (Motion Bus)ĪóRS232ĪóRS485╝░ŠÄ┤aŲ„Įė┐┌Ż¼═¼ĢrŠ▀ėą┼cSVŽÓ═¼Ą─ū¾ėęöUš╣Įė┐┌Ż¼╣▓ŽĒSV╦∙ėąöUš╣─ŻēKŻ¼║▄▀m║Ž░³čbÖCąĄĄ─ČÓ▌S┐žųŲĪŻ
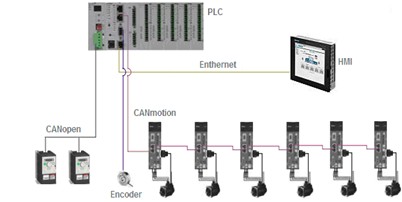
łD3 ŽĄĮy╝▄śŗ
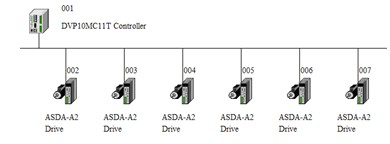
▒ŠŽĄĮyųąDVP10MC▓╔ė├CANMotion┐žųŲ6▌S╦┼Ę■čbų├Ż¼īŹ¼FČÓ▌S═¼▓Į┐žųŲĪŻā╔┼_ūāŅlŲ„═©▀^ū¾é╚Ą─CANopenų„šŠ─ŻēK┐žųŲŻ¼īŹ¼F╦┘Č╚┐žųŲĪŻHMI▓╔ė├XBTGTŽĄ┴ąė|├■Ų┴Ż¼═©▀^MODBUS/TCPģfūh┼c▀\äė┐žųŲŲ„═©ėŹŻ╗¼Fł÷£žČ╚▓╔ė├PID┐žųŲŻ¼£žČ╚┐žųŲŠ½┤_ĪŻ
▒Ē1 ŽĄĮy┼õų├
4 ┐žųŲ╣ż╦ć
ŖA╩ųčbų├ė╔╚²éĆ╦┼Ę■ļŖÖC“īäėŻ¼═Ļ│╔┤³ūėĄ─ęŲ╦═Ż¼ŲõļŖūė═╣▌åŪ·ŠĆ╚ńŽ┬łD╩ŠŻ║
łD4 ŖA╩ųčbų├═╣▌åŪ·ŠĆ
ųŲ┤³╣ż╬╗ė╔ę╗éĆ╦┼Ę■ļŖÖC“īäėŻ¼Ųõ═╣▌åŪ·ŠĆ╚ńłD5╦∙╩ŠĪŻ
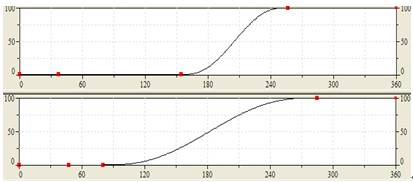
łD5 ¤ßĘŌčbų├═╣▌åŪ·ŠĆ
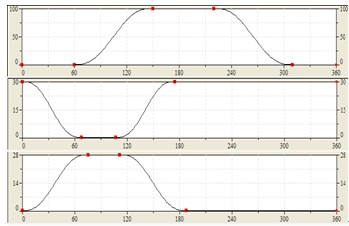
└Ł─Żčbų├ė╔ā╔éĆ╦┼Ę■ļŖÖC“īäėŻ¼Ųõ═╣▌åŪ·ŠĆ╚ńłD6╦∙╩ŠĪŻ
łD6 └Ł─żčbų├═╣▌åŪ·ŠĆ
ų„▌SūāŅlŲ„“īäėĄ─ļŖÖC╔ŽÄ¦ę╗éĆŠÄ┤aŲ„Ż¼į┌š²│Ż▀\ąąĢrŻ¼Ųõ╦¹▌SĖ∙ō■ūį╝║╦∙╠ÄĄ─╬╗ų├ŽÓæ¬ū÷Ė·ļS▀\äėĪŻĘ┼─ż▓┐Ęų▓╔ė├Åł┴”┐žųŲŻ¼╩╣Ę┼─ż▌üį┌Ę┼─ż▀^│╠ųąŻ¼Š∙ä“Ę┼─żĪŻ
└Ł─ż▌S═©▀^╦┘Č╚┐žųŲ▀MĮo░³čb─żŻ¼į┌├┐╦═ę╗éĆ┤³ūėĢrŻ¼═©▀^╔½ś╦ū„×ķŪ░ę╗┤╬┤³ķLÖz£yė|░lą┼╠¢Ż¼ų▒ĮėĮė╚ļĄĮ▀\äė┐žųŲŲ„Ė▀╦┘ą┼╠¢Įė┐┌Ż¼╚╗║¾═©▀^═Ō▓┐ŠÄ┤aŲ„ūx╚ĪīŹļH─żķLŻ¼┼c┤µā”Ą─ś╦£╩ķLČ╚▀Mąą▒╚▌^Ż¼╚ń╣¹ėąŲ½▓ŅĄ─įÆŻ¼Š═į┌Ž┬ę╗░³▀Mąąš{š¹ĪŻ
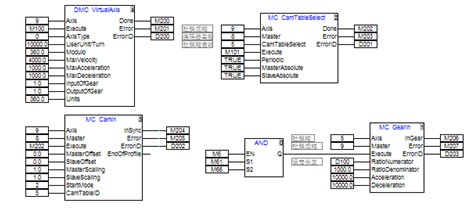
└Ł─żĄ─īÆĦ═©▀^ļŖūė═╣▌åīŹ¼FŻ¼┐╔ęį▒ŻūCĄĮš¹ÖCĄ─╦┘Č╚ę╗ų┬ąįŻ¼Ą½╩Ū═╣▌åĄ─Ū·ŠĆ▓╗─▄į┌ŠĆą▐Ė─Ż¼Ą½┐╔╩╣ė├╠ō▌SĄ─╣”─▄Ż║╝┤╩╣ė├MC-VirtualAxisųĖ┴ŅśŗĮ©ę╗éĆ╠ōöM▌SĪŻ╠ō▌S╩Ū▀\äė┐žųŲŲ„ā╚▓┐┐╔ęįäōĮ©Ą─ę╗éĆ╝┘Žļ▌SŻ¼īŻķTė├ė┌╬╗ęŲ┴┐»B╝ėėŗ╦Ń▀Mąą╩╣ė├Ż¼ė╔ė┌╩Ū└ĒŽļ▌SŻ¼╦∙ęį▓╗Ģ■│÷¼F╚╬║╬Ų½▓ŅŻ¼▓óŪę┐╔ęįūį╝║Č©┴x╚╬║╬▄ē█EĪŻ▀@└’īó╠ō▌S║═īŹ▌SĄ─═╣▌åŪ·ŠĆė├ļŖūė²X▌åĘĮ╩Įć¦║ŽŻ¼ū÷═¼▓ĮŻ¼▀\ąą▀^│╠ųą┐╔ęįą▐Ė─ļŖūė²X▌åĄ─²X▌å▒╚Ż¼╝┤┐╔▀_ĄĮį┌ŠĆš{╣Ø═╣▌åŪ·ŠĆĄ──┐Ą─ĪŻ
į┌═ŻÖCĢrŻ¼└Ł─żčbų├į┌═Ļ│╔▒Š┤╬└Ł╦═┤³ūė║¾Ż¼┴ó╝┤═Żų╣ĪŻųŲ┤³čbų├į┌└Ł─żčbų├═Żų╣║¾Ż¼ę▓┴ó╝┤═Żų╣Ż¼▓óŪę▀\äėĄĮ░▓╚½╬╗ų├Ż¼Ą╚┤²Ž┬┤╬╣żū„ĪŻį┘┤╬▀\ąąŪ░Ż¼ųŲ┤³čbų├ąĶ▀\ąąĄĮ═¼▓ĮĄ─╬╗ų├║¾Ż¼ķ_╩╝▀\ąąų„ÖCĪŻ
łD7 └Ł─żčbų├Ū·ŠĆ┐žųŲ
5 ŽĄĮy═©ėŹ
5.1 ūāŅl▓┐Ęų
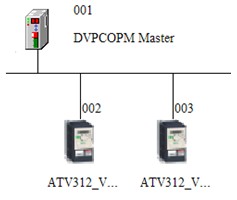
ūāŅlŲ„║═▀\äė┐žųŲŲ„═©ėŹĢrąĶę¬į┌CANopen Builder▄ø╝■ųąī¦╚ļATV312Ą─EDS╬─╝■ĪŻ
DVPCOPM-SL─ŻēK╩Ū▀\ąąė┌DVP10MCū¾é╚Ą─CANopenų„šŠ─ŻēKŻ¼«öDVP10MC═©▀^DVPCOPM-SL─ŻēK┼cCANopenŠWĮjŽÓ▀BĢrŻ¼DVPCOPM-SL─ŻēKžōž¤▀\äė┐žųŲŲ„┼c┐éŠĆ╔ŽŲõ╦³Å─šŠĄ─öĄō■Į╗ōQĮė┐┌ĪŻDVPCOPM-SL─ŻēK╝╚┐╔ęįį┌┐éŠĆųąū÷ų„šŠŻ¼ę▓┐╔ęį═©▀^įOų├╩╣Ųõį┌┐éŠĆųąū÷Å─šŠĪŻ─ŻēKė│Ž±ĄžųĘŻ║▌ö╚ļŻ║D6000-D6226Ż¼▌ö│÷D6250-D6476ĪŻ
DVPCOPM-SLį┌įOų├ĄžųĘĢrŻ¼ų╗ėąį┌─ŻēKöÓļŖŪķørŽ┬įOų├▓┼ėąą¦Ż¼═Ļ│╔įOų├║¾Ż¼į┘īó─ŻēK╔ŽļŖĪŻ╚ń╣¹ĮėŠĆ┼c╣سcĄžųĘŠ∙įOų├š²┤_Ż¼─ŻēK╔Ž├µĄ─LEDĢ■’@╩Š«öŪ░šŠ╠¢ĄžųĘŻ¼╚ń╣¹×ķ╝t╔½┤·┤aķWĀqŻ¼šłÖz▓ķ═©ėŹ╦┘┬╩▓╗ę¬╠½Ė▀Ż¼╗“▀xė├ś╦£╩Ą─CANļŖ└|ĪŻ
łD8 ūāŅl┐éŠĆłD
5.2 ╦┼Ę■▓┐Ęų
łD9 ╦┼Ę■┐éŠĆłD
╦┼Ę■“īäėŲ„Ą─ģóöĄįOų├╚ńŽ┬Ż║
P1-01=BŻ©╦┼Ę■“īäėŲ„įOų├×ķCANOpen─Ż╩ĮŻ®Ż╗
P3-00=2Ż©╦┼Ę■“īäėŲ„Ą─CANOpenšŠ╠¢įOų├×ķ“2”Ż®Ż╗
P3-01=403Ż©╦┼Ę■“īäėŲ„į┌CANOpenųą═©ėŹ╦┘┬╩įOų├×ķ1Mbit/sŻ®Ż╗
P2-15=122Ż©╦┼Ę■“īäėŲ„Ą──µŽ“śOŽ▐ķ_ĻPįO×ķ│Żķ_Ż®Ż╗
P2-16=123Ż©╦┼Ę■“īäėŲ„Ą─š²Ž“śOŽ▐ķ_ĻPįO×ķ│Żķ_Ż®Ż╗
P2-17=121Ż©╦┼Ę■“īäėŲ„Ą─╝▒═Żķ_ĻPįO×ķ│Żķ_Ż®ĪŻ
Ųõ╦¹╦┼Ę■“īäėŲ„Ą─ģóöĄįOų├ų╗ėąšŠ╠¢įOų├▓╗═¼Ż¼įOų├═Ļ«ģ║¾╦┼Ę■“īäėŲ„ĒÜųžą┬╔ŽļŖĪŻDVP10MCū±čŁCANopenŻ©DSP402Ż®ģfūhŻ¼▓╔ė├═¼▓Įą┼╠¢īŹ¼FČÓ▌S═¼▓ĮŻ¼ČÓ▌SŽĄĮyų¦│ų╩«┴∙éĆīŹ▌SŻ¼═Ō╝ėā╔éĆ╠ō▌SĪŻį┌ŠWĮj═©ėŹĘĮ├µŻ¼┐╔ų¦│ųDeviceNetų„Å─šŠĪóCANopenų„Å─šŠĪóProfibus-DPÅ─šŠŻ¼┐╔ĮMĮ©╣”─▄Å═ļsĄ─┐žųŲŽĄĮyĪŻ
5.3 ęį╠½ŠW▓┐Ęų
DVP10MC11T╠ß╣®ę╗éĆęį╠½ŠWĮė┐┌Ż¼┤╦Įė┐┌×ķ▀\äė┐žųŲ─ŻēK╦∙ėąŻ¼ų¦│ųModbusTCP
ģfūhŻ¼PCČ╦▄ø╝■CANopenBuilder═©▀^┤╦Įė┐┌┐╔ė├ė┌Ž┬▌dCANopen▀\äė┐žųŲŠWĮj┼õų├Īó▀\äė│╠ą“ĪóG┤·┤aŻ¼▒O┐žčbų├Ą╚╣”─▄ĪŻDVP10MC11Tį┌ęį╠½ŠWŠWĮjųąų╗─▄ū÷Å─Ż¼═¼Ģr┐╔Įė╩▄ūŅČÓ4éĆų„šŠĄ─įLå¢ĪŻ┤╦Įė┐┌▀Ćų¦│ųūįäė╠°ŠĆ╣”─▄Ż¼«ö┼cėŗ╦ŃÖC╗“Į╗ōQÖC▀BĮėĢrŻ¼▓╗ąĶę¬╠žäeū„╠°ŠĆ╠Ä└ĒĪŻĮė┐┌╔ŽĄ─LED┐╔ęį’@╩Šęį╠½ŠW«öŪ░Ą─▀BĮėĀŅæBŻ¼ĘĮ▒Ńė├æ¶▓ķįāĪŻ
DVP10MC11TĄ─ęį╠½ŠWģóöĄįOų├═©▀^CANopenBuilder▄ø╝■įOų├ĪŻDVP10MC11Tų¦│ųĄ─Modbus╣”─▄┤a║═ī”æ¬Ą─ĄžųĘį¬╝■╚ńŽ┬▒Ē╦∙╩ŠŻ║
▒Ē2 Modbus╣”─▄┤a
╩®─═Ą├XBTGT5330ė|├■Ų┴╝»│╔ėąęį╠½ŠWĮė┐┌Ż¼ų¦│ųModbusTCPŻ¼╣╩┐╔ęįĘĮ├µĄ─▀BĮėĪŻė|├■Ų┴į┌“īäėįOų├ĢrŻ¼ąĶę¬įOų├│╔Ą═ūų╣Øā׎╚ĪŻ
6 £žČ╚┐žųŲ
į┌╣ż│╠īŹļHųąŻ¼æ¬ė├ūŅ×ķÅVĘ║Ą─š{╣ØŲ„┐žųŲęÄ┬╔×ķ▒╚└²ĪóĘeĘųĪó╬óĘų┐žųŲŻ¼║åĘQPID┐žųŲŻ¼ėųĘQPIDš{╣ØĪŻPID┐žųŲŲ„å¢╩└ų┴Į±ęčėąĮ³70─ĻÜv╩ĘŻ¼╦³ęįŲõĮYśŗ║åå╬ĪóĘĆČ©ąį║├Īó╣żū„┐╔┐┐Īóš{š¹ĘĮ▒ŃČ°│╔×ķ╣żśI┐žųŲĄ─ų„ę¬╝╝ągų«ę╗ĪŻ▒ŠŽĄĮyųąėą░╦═©Ą└£žČ╚▓╔ė├PID┐žųŲ£žČ╚Ż¼╩╣ė├DVP04TC-Sū„×ķ£žČ╚öĄō■▓╔╝»─ŻēKŻ¼Įø▀^PLC│╠ą“ųąĄ─īŻė├£žČ╚┐žųŲųĖ┴ŅŻ¼ė├PLC▌ö│÷³c┐žųŲ╣╠æB└^ļŖŲ„äėū„Ż¼īŹ¼F£žČ╚Ą─╝ė¤ß┐žųŲĪŻ
DVP04TC-S─ŻēK╩Ū▀\ąą┼cDVP10MCėęé╚Ą─£žČ╚┐žųŲ─ŻēKŻ¼Š▀ėąīŻė├Ą─PID£žČ╚ūįäėš{š¹╣”─▄Ż¼┐╔ęįīŹ¼FPID┐žųŲģóöĄĄ─ūįäėėŗ╦ŃŻ¼┐žųŲ£žČ╚Š½Č╚▀_ĄĮ±1Č╚ĪŻ
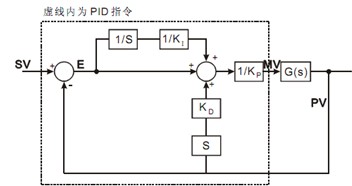
«öPIDųĖ┴ŅĄ─äėū„ĘĮŽ“╣”─▄▀xō±×ķK3╗“K4 ĢrŻ¼ŲõųąPIDųĖ┴Ņā╚▓┐╩╣ė├Ą─▀\╦Ń╣½╩Į╩Ū
ŲõųąŲ½▓Ņ┴┐╣╠Č©×ķŻ║E (t) = SV − PV
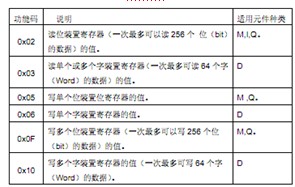
ė╔ė┌┤╦╣”─▄╩ŪīŻ×ķ£žČ╚┐žųŲČ°įOėŗĄ─╣”─▄Ż¼ę“┤╦«ö╚ĪśėĢrķg(Ts)įOų├×ķ4├ļ(K400)ĢrŻ¼ät▒Ē╩Š▌ö│÷ųĄ(MV)Ą─▌ö│÷ĘČć·×ķK0~K4Ż¼000ų«ķgŻ¼▓óŪę┤Ņ┼õĄ─GPWMųĖ┴ŅĄ─ų▄Ų┌ĢrķgįOų├ųĄę▓ąĶįO×ķ4├ļ(K4Ż¼000)ĪŻ
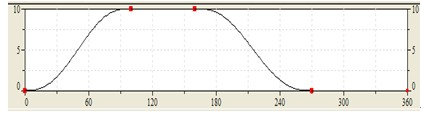
łD10 PIDųĖ┴ŅĄ─äėū„ĘĮŽ“×ķ K3~K4 Ą─┐žųŲĘĮēK
łD10ųąĄ─1/KI╝░1/KPĄ─Ę¹╠¢Ęųäe▒Ē╩Š│²ęįKI╝░│²ęįKPĄ─╣”─▄Ż¼ė╔ė┌┤╦┐žųŲĘĮēK×ķ£žČ╚┐žųŲīŻė├Ą─PIDųĖ┴ŅŻ¼ę“┤╦ąĶ┤Ņ┼õGPWMųĖ┴Ņę╗Ų╩╣ė├ĪŻ
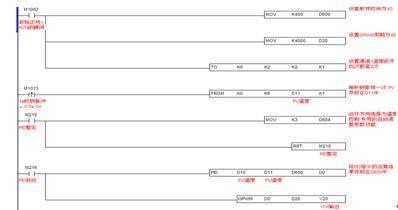
«ö╩╣ė├š▀į┌┐žųŲ£žČ╚Ą─ŁhŠ│Ž┬▓╗ų¬╚ń║╬š{š¹Ė„ĒŚģóöĄĢrŻ¼┐╔Ž╚▀xō±K3▀@ĒŚūįäėš{š¹╣”─▄Ż¼Ą╚ĄĮųĖ┴Ņā╚▓┐š{š¹═Ļ«ģ║¾(╣”─▄▀xō±ūįäėĢ■įOų├×ķ K4)Ż¼╩╣ė├š▀┐╔į┘ę└┐žųŲĮY╣¹ą▐Ė─│╔Ė³╝čĄ─ģóöĄĪŻ
łD11 PID┐žųŲ│╠ą“
7 ĮY╩°šZ
Įø▀^¼Fł÷£yįć║¾Ż¼ŽĄĮyūŅ┤¾╦┘Č╚┐╔ęįĘĆČ©▀_ĄĮ70░³/ĘųńŖŻ¼▀@╠ūįOéõ│╔╣”ķ_░lś╦ųŠų°░³čbÖCįOéõęčĮøÅ─║åå╬Ą─░ļÖCąĄ╗»ļpūāŅl╔²╝ēĄĮ╚½╦┼Ę■ŽĄĮyĪŻ
╚½ūįäė░³čbÖC▓╔ė├┼_▀_┐éŠĆą═▀\äė┐žųŲŲ„Ż¼įō«aŲĘ┴╝║├Ą─╝µ╚▌ąįęį╝░ā׫ɥ─ąį─▄╩╣┐žųŲūāĄ├║åęūĪóĖ▀ą¦║═ĘĆČ©ĪŻļŖÜŌĮYśŗ║åå╬║═Ė▀ĘĆČ©ąį×ķė├æ¶äōįņ┴╦ārųĄĪŻ
ū„š▀║åĮķ
äóä┘ąńŻ©1981-Ż®─ą ╣ż│╠▓┐ų„╣▄Ż¼╚╬┬Üė┌Ō∙║═░³čbŽĄĮyėąŽ▐╣½╦ŠŻ¼ų„ę¬Å─╩┬ūįäė╗»┐žųŲŽĄĮyĄ─įOėŗ║═ķ_░l╣żū„ĪŻ
|

 ų„šŠų®ųļ│ž─Ż░ÕŻ║
╚š║½čŪų▐╩ėŲĄę╗Ū°Č■Ū°╚²Ū°|
čŪų▐│╔į┌╚╦Ž▀av╬▐┬ļ|
ųą╬─ į┌Ž▀ ╚š║½ čŪų▐ ┼Ę├└|
┼Ę├└Ęß┬·ĖŠ┤¾ass|
╣·▓·ū█║Ž╔½Š½ŲĘę╗Ū°Č■Ū°╚²Ū°
|
av╬ńę╣ĖŻ└¹ę╗Ų¼├ŌĘč┐┤Š├Š├|
čŪų▐╔½═Ą═Ą╔½ÓÓÓÓ║▌║▌99|
║½╣·čŪų▐Š½ŲĘaį┌Ž▀╬▐┬ļ|
╠ę╗©Ą║čŪų▐│╔į┌╚╦Ž▀AV|
Š├Š├Š½ŲĘ╣·▓·Š├Š½╣·▓·╣¹Č│┤½├Į|
Š┼╔½Š½ŲĘ╣·▓·čŪų▐av┬ķČ╣ę╗|
├ŌĘč╣·▓·┬Ń╠Õ├└┼«╩ėŲĄ╚½╗Ų|
╩ėŲĄę╗Ū°Č■Ū°▓╗ųą╬─ūų─╗|
Š├Š├Š½ŲĘ╣·▓·Š┼ę╗Š┼Š┼Š┼|
Č■Ū°╚²Ū°╣·▓·į┌Ž▀╣█┐┤|
╣·▓·Š½ŲĘĖŻ└¹2020Š├Š├|
╬▐┬ļ╚╦Ų▐Š½ŲĘę╗Ū°Č■|
Š├Š├Š½ŲĘ╣·▓·čŪų▐av┬ķ|
╣·▓·Š½ŲĘčŪų▐av╚²Ū°╔½|
Š½ŲĘ╚╦Ų▐Č■Ū°ųą╬─ūų─╗|
▓╗┐©ę╗Ū°Č■Ū°╣·▓·į┌Ž▀|
╚╦╚╦ū÷╚╦╚╦Ų▐╚╦╚╦Š½|
Č½Š®╚╚╝ė└š▒╚╬▐┬ļ╔┘ĖŠ|
avį┌Ž▀▓źĘ┼╣·▓·ę╗Ū°|
Š½ŲĘŠ├Š├Š├Š├Š├╬▐┬ļ▓╗┐©|
╚š║½av╬▐┬ļ├ŌĘč▓źĘ┼|
╣·▓·Š½ŲĘę╗Ū°Č■Ū°╚²Ū°╗Ų|
╣·▓·╦»╩ņ├įŖdŽĄ┴ą═°šŠ|
╣·▓·Š½ŲĘ╠ņ╠├├█avį┌Ž▀▓źĘ┼|
╔┘ĖŠ▒╗ČÓ╚╦cę╣ę╣╦¼╦¼av|
╣·▓·Š½ŲĘ│╔╚╦▓╗┐©į┌Ž▀╣█┐┤|
│╔╚╦╣·▓·į┌Ž▀┐┤▓╗┐©|
čŪų▐ė└Š├ę╗Ū°Č■Ū°╚²Ū°į┌Ž▀|
╬▐┬ļ╚╦Ų▐Š½ŲĘę╗Ū°Č■Ū°╚²Ū°Ž┬įž|
čŪų▐▓·╣·═Ąv▓·═Ąvūį┼─╔½Įõ|
╚š▒Š╩ņĖŠ╚╦Ų▐ųą│÷|
čŪų▐ūŅ┤¾av├ŌĘč╣█┐┤|
Š├Š├Š½ŲĘ╔½ę╗Ūķę╗┬ęę╗┬ū|
čŪų▐ūŅ┤¾Ą─╩ņ┼«╦«├█╠ęAV═°šŠ|
ųą╬─ūų─╗╬▐┬ļ▓╗┐©├ŌĘč╩ėŲĄ|
91╣·─┌╩ėŲĄį┌Ž▀╣█┐┤|
ų„šŠų®ųļ│ž─Ż░ÕŻ║
╚š║½čŪų▐╩ėŲĄę╗Ū°Č■Ū°╚²Ū°|
čŪų▐│╔į┌╚╦Ž▀av╬▐┬ļ|
ųą╬─ į┌Ž▀ ╚š║½ čŪų▐ ┼Ę├└|
┼Ę├└Ęß┬·ĖŠ┤¾ass|
╣·▓·ū█║Ž╔½Š½ŲĘę╗Ū°Č■Ū°╚²Ū°
|
av╬ńę╣ĖŻ└¹ę╗Ų¼├ŌĘč┐┤Š├Š├|
čŪų▐╔½═Ą═Ą╔½ÓÓÓÓ║▌║▌99|
║½╣·čŪų▐Š½ŲĘaį┌Ž▀╬▐┬ļ|
╠ę╗©Ą║čŪų▐│╔į┌╚╦Ž▀AV|
Š├Š├Š½ŲĘ╣·▓·Š├Š½╣·▓·╣¹Č│┤½├Į|
Š┼╔½Š½ŲĘ╣·▓·čŪų▐av┬ķČ╣ę╗|
├ŌĘč╣·▓·┬Ń╠Õ├└┼«╩ėŲĄ╚½╗Ų|
╩ėŲĄę╗Ū°Č■Ū°▓╗ųą╬─ūų─╗|
Š├Š├Š½ŲĘ╣·▓·Š┼ę╗Š┼Š┼Š┼|
Č■Ū°╚²Ū°╣·▓·į┌Ž▀╣█┐┤|
╣·▓·Š½ŲĘĖŻ└¹2020Š├Š├|
╬▐┬ļ╚╦Ų▐Š½ŲĘę╗Ū°Č■|
Š├Š├Š½ŲĘ╣·▓·čŪų▐av┬ķ|
╣·▓·Š½ŲĘčŪų▐av╚²Ū°╔½|
Š½ŲĘ╚╦Ų▐Č■Ū°ųą╬─ūų─╗|
▓╗┐©ę╗Ū°Č■Ū°╣·▓·į┌Ž▀|
╚╦╚╦ū÷╚╦╚╦Ų▐╚╦╚╦Š½|
Č½Š®╚╚╝ė└š▒╚╬▐┬ļ╔┘ĖŠ|
avį┌Ž▀▓źĘ┼╣·▓·ę╗Ū°|
Š½ŲĘŠ├Š├Š├Š├Š├╬▐┬ļ▓╗┐©|
╚š║½av╬▐┬ļ├ŌĘč▓źĘ┼|
╣·▓·Š½ŲĘę╗Ū°Č■Ū°╚²Ū°╗Ų|
╣·▓·╦»╩ņ├įŖdŽĄ┴ą═°šŠ|
╣·▓·Š½ŲĘ╠ņ╠├├█avį┌Ž▀▓źĘ┼|
╔┘ĖŠ▒╗ČÓ╚╦cę╣ę╣╦¼╦¼av|
╣·▓·Š½ŲĘ│╔╚╦▓╗┐©į┌Ž▀╣█┐┤|
│╔╚╦╣·▓·į┌Ž▀┐┤▓╗┐©|
čŪų▐ė└Š├ę╗Ū°Č■Ū°╚²Ū°į┌Ž▀|
╬▐┬ļ╚╦Ų▐Š½ŲĘę╗Ū°Č■Ū°╚²Ū°Ž┬įž|
čŪų▐▓·╣·═Ąv▓·═Ąvūį┼─╔½Įõ|
╚š▒Š╩ņĖŠ╚╦Ų▐ųą│÷|
čŪų▐ūŅ┤¾av├ŌĘč╣█┐┤|
Š├Š├Š½ŲĘ╔½ę╗Ūķę╗┬ęę╗┬ū|
čŪų▐ūŅ┤¾Ą─╩ņ┼«╦«├█╠ęAV═°šŠ|
ųą╬─ūų─╗╬▐┬ļ▓╗┐©├ŌĘč╩ėŲĄ|
91╣·─┌╩ėŲĄį┌Ž▀╣█┐┤|