�߾d�� �����d ���
�V�ݔ����O������˾���V�ݣ�510165��
����ժҪ ������̽ӑ���ڸ߾����ŷ�����ϵ�y�л������Ʒ����Լ�����h�Ŀ��Ʋ��ԡ�Ԕ������������ɘ��c̎�����Լ��P�I�����x�͡�
�����P�I�~�� LEM��������� ���gʸ������ DSP �ŷ�����
�����ЈD���̖�� TM351 �īI���R�a�� A
The Application of LEM Hall Current Transducer in Digital Servo Driver
And Design of Digital Servo Current Loop
JI Mianhao, MA Wenxing, YANG Jianqing
GSK CNC EQUIPMENT CO..LTD.
Guangzhou (510165)
����Abstract �� This paper presents the proposed control in high performance digital sevro control system and digital curen loop. Based on this, This paper briefly introduces the design of the curen loop and the selection of the key component .
����Key words: LEM Current Transducer; SVPWM, DSP, Servo Control
����һ������
�����ŷ����g�Ǹ�ۙ�c��λ���Ƽ��g���ǙC�һ�w�����g����Ҫ�M�ɲ��֣����V���ؑ����ڔ��ؙC�������I�C���˵��Ԅӻ��b���С��S���F�����I���aҎģ�IJ����U�����ИI����ŷ�ϵ�y��������������������������˸��ߵ�Ҫ������о�����������ܡ��߿ɿ��Ե��ŷ���ϵ�y�ǹ��I���M���Ҿ���Ŭ����Ŀ�ˣ�����ʮ����Ҫ�ĬF�����x��
����Ŀǰ�����ŷ������������ձ����W���ȇ��҉Ŕࡣ�҇�ÿ����Ҫ�ć����M�ڴ����Ĵ���O������CNC���ؙC�����ИI���M�������r��ߣ��S���ղ��㡣�҇���������֪�R�a���ȫ����ʽ�ŷ������s��90����_ʼҎģ�����a���졣�A�Д���HSVϵ��ȫ���ֽ����ŷ�늙C�ӆ�Ԫ�������õ����ܡ��ҹ�˾�����_�l��ȫ���ֽ����ŷ�ϵ�y�{�ٱȞ�1:5000���߶ˮaƷ����Ҫ���Ç���Ľ����ŷ�ϵ�y����Ҫ�LJ��a�ŷ��ӿ������ڸ��ٺ߾��ȿ������Է��棬�c�ձ���FANUC�����⡢���¡���ʿ�Լ��������T�ӵȇ������M�aƷ��ȣ�߀�������@����ࡣ
�������������ŷ�ϵ�y�Ŀ��Ʋ���
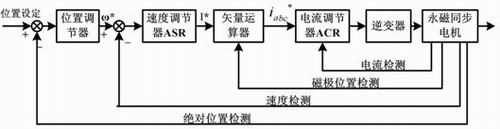
���������ŷ�ϵ�yһ�����������]�h�����. ��ԭ����D1��ʾ����һ����λ�íh���ڶ������ٶȭh��������������h������λ�á��ٶȶ�����h��������h�t��ϵ�y�ȵăȭh�����Ę������ɺ���Ӳ���Լ��P�I����ܛ���M�ɵģ�ȫ�����ŷ�ϵ�y�ǔ��ؙC���ĺ��Ă��Ӳ��֣�Ҳ�Ǽ��g�y�����IJ��֣�������Ҫ�����c���Ǹ��١��߾��������S�����ӡ�����h���ŷ�ϵ�y�ĺ��Ŀ��ƭh�������C�ٶȾ����Լ�����ƽ���Ե����P�I���ǔ����ŷ��е�����h���OӋ������һ��ϵ�y�����Ƿ����c����h���OӋϢϢ���P��
�D1 ����ͬ��늙C�ŷ�ϵ�y�Ļ�����D
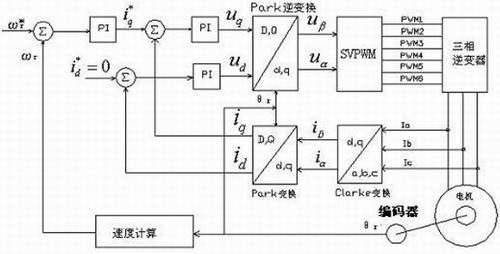
��������ͬ��늙Cʸ������ϵ�y��D��D2��ʾ.�ĈD2��֪������ͬ��늙Cʸ������ϵ�y��Ҫ������ײ��ֽM�ɣ�1���D�ӴŘOλ�Ùz�y���ٶ�Ӌ��ģ�K��2���ٶȣ�����{������3������׃�Qģ�K��4��SVPWMģ�K��5����������׃ģ�K��6��늉�/����ɘ�ģ�K��������^�����£��ٶ�ָ����̖�c�z�y�����D���ٶ���̖����^�����ٶȿ��������{����ݔ�� ָ����̖����q�S����������o����̖��d�S����������Ľo����̖��0������ɘӵõ������ඨ����� ͨ�^Clark׃�Q���� ����ϵ������� ��ͨ�^Park׃�Q����d-q���D����ϵ�����ֵ ���քe��d�S��q�S����{�����ķ���ݔ�롣d�S��q�S����Ľo���ͷ���֮�g��ƫ��քeݔ�뵽d�S��q�S����������������^���������{����ݔ��늉� ���ٽ��^Park��׃�Q�քe�����-������ϵ�S늉� ���{��SVPWMģ�Kݔ����·PWM����IGBT�a���l�ʺͷ�ֵ��׃�������������ݔ��늙C��
�D 2 ����ͬ��늙C ʸ������ϵ�y��D
�������������ŷ�����h�OӋ��Ҫ
��������h������{��������׃���M�ɣ���������ʹ늙C�@�M������r���ʴ_�ظ�ۙ���������̖�������������Ҫ�о�����������������h������������A�y������������N���ھ�������������У�늙C�@�M����c�����������^�����ֵͨ�^PI�������c���Dz���̖����^���Ķ��a��PWM��̖������׃�����䃞�c����׃�����_�P�l�ʹ̶���ȱ�c���a�����ƺ�ϵ�y���t���ھ����������ϵ�y�У�PWM�_�P�l�ʵ�׃�����D�ز��ӵ�Ӱ푲��Ǻܴ����PWM�_�P�l�ʵ��x����Ҫ���m��늙C���D�ٷ�������������������Խ��Խ�á��ڜ��h����������У�늙C�@�M����c����������Ü��h���^���M�б��^�����h���^����ݔ�����ڿ�����׃�����䃞�c��˲�B푑������ã���������Q��ϵ�y���t��ȱ�c����׃�����_�P�l�ʲ��̶������Ü��h������ƕr��������늙C���D�ز���Ӱ푺ܴ��˜pС�D�ز����˲����^С�Ď��������ǎ����ĜpС�ܵ���׃���_�P���������ƣ��@���OӋ�r��Ҫ�C�Ͽ��]�����A�y����������У������@�M���H����IJɘ�ֵ�c��������IJɘ�ֵ��늙C��늉����̣�Ӌ������Ȍ��H������S������������늉���ͨ�^PWM������׃�������÷e���a���h����������Ч�؏��a늙C����׃����늉�Ӌ��Y����Ӱ푣��@�N������Ʒ����������õķ��B�̈́ӑB���ܣ���ȱ�c�ǽY�����s����Ҫ����̎������
�����ġ��ŷ�ϵ�y��Ӳ���OӋ �� ����������x��
���������ŷ�ϵ�y��Ҫ���岿�ֽM�ɣ�����ͬ��늄әC���Դģ�K�����c��׃�·ģ�K���ٶ��cλ�Ùz�y�·ģ�K�Լ������·ģ�K�� �����·ģ�K�������Ŀ���оƬ,�˙C�����ͨӍģ�K�Ĵ֣����c��׃�·ģ�K������׃�����·��늉�/����ɘ��·���^��/Ƿ�����o������������o�c�Ƅ��·��,���½�B���Ŀ���оƬ,��׃�ģ�K(IPM)�����ؽ�B������������x�͡�
�����ŷ��ĺ��Ŀ���оƬ����TI��˾���µ�늙C���ÿ���оƬTMS320F2812���c����ͬ�DSP�����������ͻ������:(1)���ø����ܵ��o�BCMOS���g,���l�����_��150MIPS,ʹ��ָ�����ڿs�̵�6.67ns(150MHz),������32λ����,�Ķ�������̎������;(2) ����,���늉�����1.8V(�Ⱥ�)��3.3V(I/O);(3)Ƭ�ȸ��_128K�ֵ�FLASH����惦��,18K��SARAM��4K��ROM;(4)����12λ��A/D�D�Q��,��С�D�Q�r�g��80ns��.
������׃�·ʹ�õ������˾��IPMģ�KPS21867��ԓ�����ܹ���ģ�K���õ�5 ��IGBT ��ˇ�����Ã�����Ėż��Ӻͱ��o�·���Բ���˼�h�ij�С���w�e��ݔ�����ʏ��ŵ����ನ�Ρ�����������ͻ������:(1)�����Ĺ���ݔ���·��ֱ���B��ؓ�d;(2)���ÖŘO���·;(3)��·���o��(4)��늉�Ƿ�����o��(5)���õ��������IGBT ��о��(6)��С���w�e���H��65 ��.
�������ɘӵľ��Ⱥ��ٶ�ֱ�ӌ�����������h���\�㾫�ȣ��Ķ�ֱ�ӌ�ϵ�y�����ܮa���dz��ش��Ӱ푡�������������y���I��ȣ���������һָ���I���S���Rķ��LEM����˾�Ļ�����������������䷀���ɿ��ĮaƷ���ܳɞ鱾ϵ�y�OӋ�����x����̖��LTS25-NP. �˿���������õ��dž��Դ���,�����ڲ����p�Դ��늵Ă�����, �Rķ�������������Ӳ���·�OӋ�ϸ��Ӻ���,����Ҫ����늉�̧���·(�p�Դ��늵Ă������������늉�̧���·ʹؓ늉��D�Q����늉�������M��DSP)�Ķ��p���Դ��ϵ�y�ĸɔ_.���˿��������һ���c�ǜ�ƯС,���ȸ�;���҃��òɘ����,��ݔ������늉���ݔ��,��������������Ӳɘ�����Լ��\�ź��M��DSPʹ������������. LTS25-NP.�͂������ľ��w���c�����܅������£�(1) ԭ߅�~�������ЧֵIPN ��25A; (2) ԭ߅����y������IP ��0����80A; (3) ���늉�: +5V; (4) ݔ��늉�Vout ��2.5��0.625V; (5) �D�Q��KN ��NP ��NS �飺1��2000; (6)�����ȣ���0.2��; (7) ���Զȣ�С��0.1��; (8) �����r�g��С��500ns;
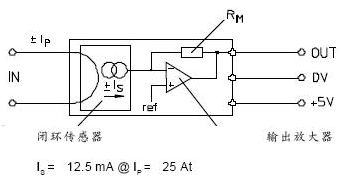
�D 3 �]�h�������������ԭ��D
����ԓ�����������O��+5�����y���ˣ�OUT�����أ�0���������_����D3��ʾ���乤��ԭ�����£�ԓ����������]�h�������������,ʹ�û������������������Ԫ�������ڸ��x�z�y�����ģ�K���aƷ���乤��ԭ���ǻ�����ƽ��ʽ��(��Q�������a��ʽ���������ͨʽ)����������^һ���L��ֱ�����r���ڌ����܇��a���ň����ň��Ĵ�С�c���^����������Ĵ�С�����ȣ��@һ�ň�����ͨ�^ܛ�Ų��ρ��ۼ���Ȼ���û��������M�Йz�y�����ڴň���׃���c����������ݔ��늉���̖�����õľ����Pϵ����ˣ������Üy�õ�ݔ����̖��ֱ�ӷ�������������Ĵ�С�����ֹ�ɔ_���ڻ����������Ĺ���Դ�˺͵ضˆΪ�����һֻ1uF������V����ݡ�
�����塢LEM �������c����z�y�·
��������z�y�·�ǰ�����ͬ��늙C�����ඨ����������������M��DSP�D�Q���ǔ�����ʽ���M��һϵ�е�׃�Q,���ڱ�ϵ�y������ƽ��ϵ�y:Ia+Ib+Ic=0; ���ֻ��Ҫ�z�y���Ѓ������,�Ϳ��Եõ��������. ������ͬ��늙C�Ĕ��Wģ�Ϳ�֪, ��������z�y�ľ��Ⱥ͌��r��������ʸ������ϵ�y���ȵ��P�I, ��˱�ϵ�y����LTS25-NP.�͂�������z�y���.
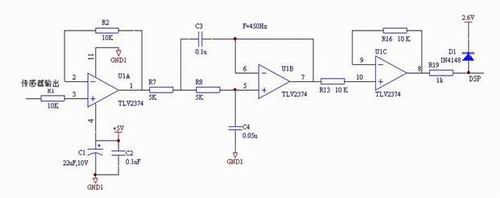
�����ڱ�ϵ�y�У��Ƀɂ�LEMģ�K�z�yA���B������. �ڌ��H�{ԇ�У����ڽ��^�����������������̖�иߴ��ɲ��������ɔ_��̖����˱���Ҫ�OӋ�V�����Ѹߴ��ɲ��������ɔ_��̖���Ƶ����Y�ό��H��r���]�������OӋ�ˎ���늉����S�Ķ��A��ͨ�V����������z�y�·�����wԭ��D��D4��ʾ��
�D4 ��� �z�y��ģ�M ���A��ͨ�V�����OӋ�·
�������ψD�У����A��ͨ�V���������x�t��Ӌ��һ�㰴�����¹�ʽ��
������ʽ��ʾ��ͨ�V�����Ľ�ֹ�l�ʡ��ڱ��OӋ��ȡ���R=10K����C3=0.1��,C4=0.05�̡����Ӌ����V�����Ľ�ֹ�l�� ��224Hz�����^�������OӋ�ĞV������������̖�������Dz����иߴ��ɲ��������ɔ_Դ�������̖���@����̖ͨ�^���·�Ŵ���̎����ʹ늉���ֵ����0��3V�����M��DSP�M��̎����
�����������Y��
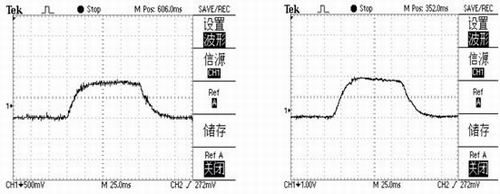
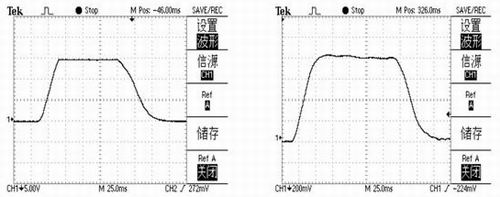
�������ϵ�y�У�PWM�l�ʞ�15kHz�����^�r�g��3��s������h�ɘ����ڞ�67��s���ٶȭh�ɘ����ڞ�0.67ms���ٶȭh��ݔ����ֵ���~�������1.5��������h��ݔ�������~��늉���1.2����������һ�_8�O������ͬ��늄әC늙C���䅢����:�~������:2.2kW���~���D��:3000r/min���~�����:5A���~���D��: 5 Nm, �~��늉�: 220V��늙C�քe��10 rpm��200 rpm��1000 rpm��2000 rpm ���ٶ��{���������O�Þ飺kpv =0.5��kiv =0.02������{���������O�Þ飺kpi =0.2��kii =0.02�r�����ӡ�ֹͣ�^�̵��D�������քe��D5��8��ʾ��
�����ĈD��ʾ�Č��οɿ�����늙C���d�\�Еr��ϵ�y�\�����ٶ�����]�h��B��,��Ѹ���_�����B�����{�����B�`���С�����Y��������ϵ�y�OӋ�������������õĄ��o�B���ܡ�
���������D 5 10 rpm ���ӡ�ֹͣ���� �D 6 200 rpm ���ӡ�ֹͣ����
�������D 7 1000 rpm ���ӡ�ֹͣ���� �D 8 2000 rpm ���ӡ�ֹͣ����
������ ���Y���Z
�ڱ�ϵ�y�����У�LEM�����������_�Ĝy��늙C���,���D�Q������ݔ����������������ָ�˶��ܝM�㱾ϵ�y��Ҫ��, ��һ��dz����e�ĮaƷ, �ڱ�ϵ�y�аl���^���У��dz����xԓ��˾�ď��҂����ڌ���λ���̎��ܵ��ķ��պͼ��g֧��. ϣ���Ժ�LEM��ӹ�˾���ṩ����ĮaƷ���õļ��g֧��,һ����҇��ĸ߶��ŷ����Ʈa�Iȡ�ø���İlչ��Ŭ��.
���������īI��
[1] �ؑ��ȣ��F�������ŷ�ϵ�y����h���A��������W������, 1995��1�£�1-114
[2] ꐲ��r������τ��Ԅӿ���ϵ�y���������Cе���I�����磬2005��1�£�97-255
[3] � �ԣ������ӌW���������ߵȽ��������磬2002��1��. 124-128
[4] �K���壬�Ώ���.TMS320F2812ԭ���c�_�l, ��������ӹ��I�����磬2005��4�£�423-438
[5] ��ռ�ɡ����������_�P�Դ��ԭ���c�OӋ����ӆ�棩[M].��������ӹ��I�����磬2004
[6] ���������¶����S��գ����쌢�����ؙC���ŷ�ϵ�y�߾���λ�Ùz�y�о��c���F.����I�Ի���2004�꣬��26����10�ڣ�23-25.
[7] LEM. LTS 25-NPϵ�����������DATASHEET [Z]. �����Rķ�������˾
[8] LEM. LTSR 25-NPϵ�����������DATASHEET [Z]. �����Rķ�������˾
���ߺ���
�߾d�ƣ�1980- �����У���؞���V�|�V�ݣ��Tʿ�����ڏV�ݔ����O������˾,��Ҫ�����ŷ������аl.
�����d��1980- �����У���؞�����ϻ�ԫ��늚�̎������ڏV�ݔ����O������˾,��Ҫ�����ŷ������аl.
ϵ��ʽ��
�������߾d��
��λ���V�ݔ����O������˾
ϵ��ַ���V�����_�_����ӿ��·һ��52̖
�]����510165
ϵ�Ԓ��13640248138 ��020-81992188-8053
E-mail��jimianhao@yahoo.com.cn