01 �aƷ����
EIO16084�Uչģ�K��EtherCAT����������ʹ�õĔUչģ�K���ɔUչ������ IO���}�_�S�@����YԴ�������������w���YԴ����ĕr��EtherCAT�������������B�Ӷ���EIO�Uչģ�K�M���YԴ�Uչ ���ɲ鿴��������IO���Uչ�c�������Uչ�S����֧��IO���h�̔Uչ��
 EIO16084�Uչģ�K EIO16084�Uչģ�K
ÿ��EIO�Uչģ�K�ڔUչ�Ӿ���ɺ���Ҫ�M���M�ж����_�l��ֻ��ʹ��ָ���� EtherCAT��վ����������Ψһ�� IO ��ַ���S��ַ��������ɼ����L����
IO ��ַ��̖ͨ�^����ָ��NODE_IO���O�ã��������ϳ���ֻ��ͨ�^IO��̖�Ϳ����L�����Uչģ�K�ϵ��YԴ���S��ַ������ʹ��“AXIS_ADDRESS”ָ��ӳ�佉���S̖���������ͨ�^BASE��AXISָ��ָ���S̖��
EIO16084�Uչģ�K�������c��
��1��֧��4�S�}�_�S�Uչ��
��2���}�_ݔ��ģʽ������/�}�_���p�}�_��
��3��ÿ�S���ݔ���}�_�l��10MHz��
��4��֧��16�M+8��IO�Uչ��ÿ���}�_�S�������2�M2��IO�ɹ����á�
��5���}�_�S�����ݔ�������ݔ������_300mA����ֱ���Ӳ���늴��y��
��6��ECAT���500us��ˢ�����ڡ�
��7�����Դ��늣��B�����Դ���ɣ��o��IO�Դ��
��ϵ�ЮaƷ�x��ָ�ϣ�
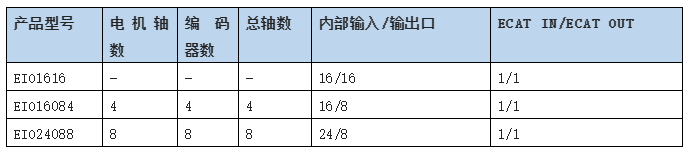
EIOϵ�Ў��S�ĔUչģ�K��ʹ�÷�����ͬ���H�ǔUչ�YԴ�����ą^�e��EIO16084��EIO24088��ʹ�÷�����ȫ��ͬ��EIO1616�������ɂ���̖���o���Sӳ�����P������
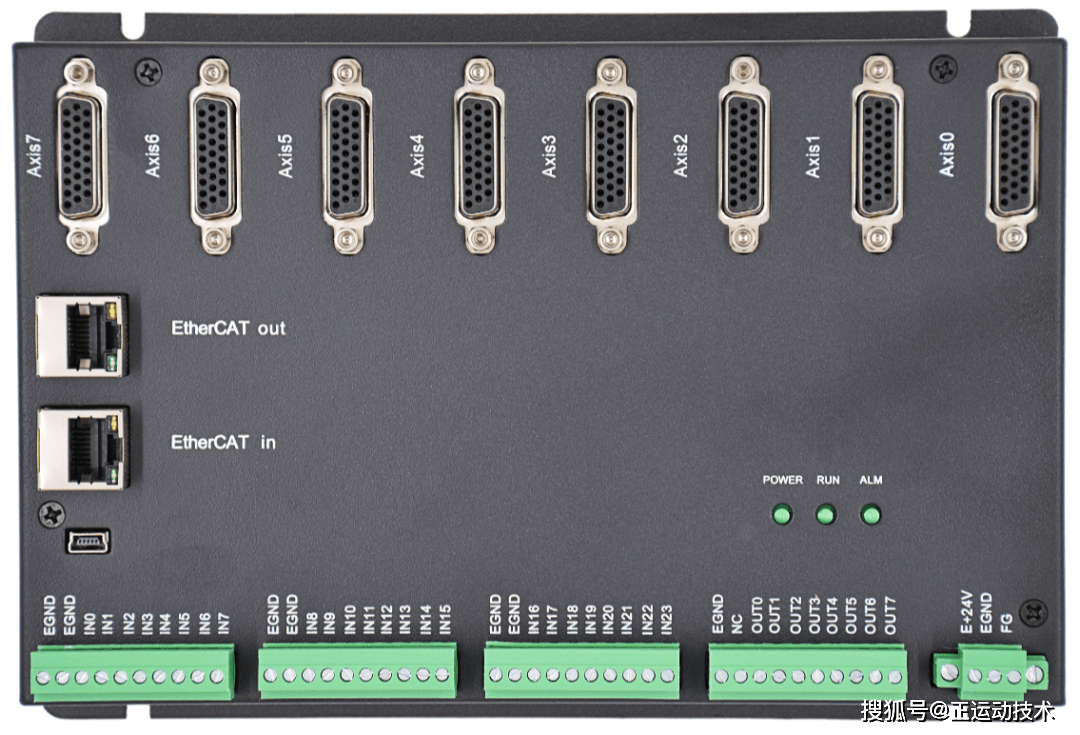 EIO24088�Uչģ�K EIO24088�Uչģ�K
02 �ӿ��f��
1.�����ӿ�
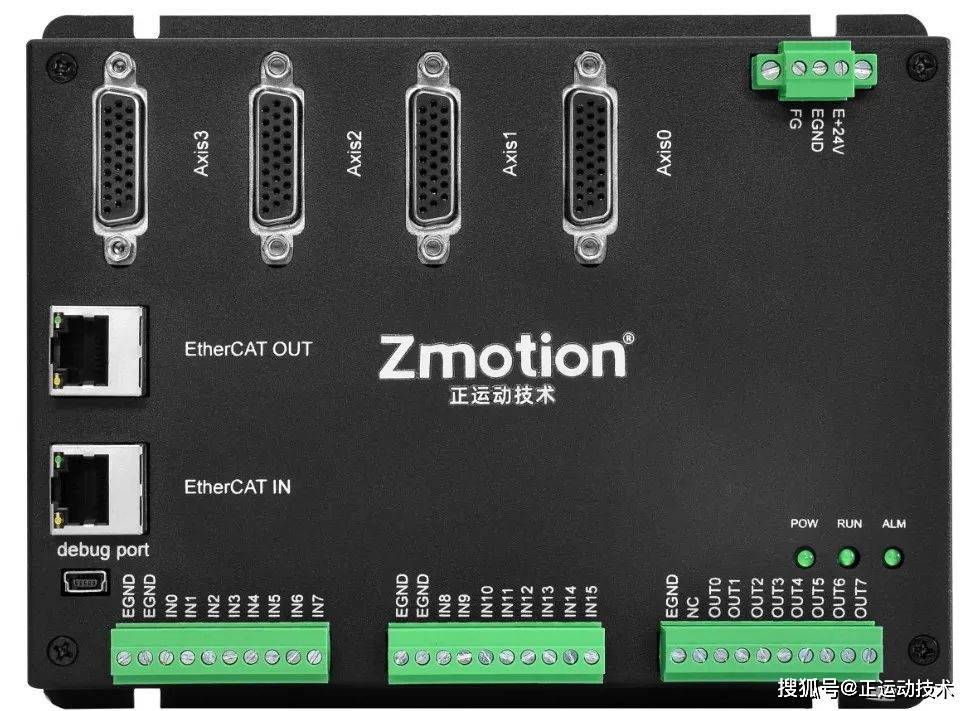
EIO16084���ɂ�EtherCAT�����ӿڣ�“EtherCAT IN”��“EtherCAT OUT”��ʹ�ؘʾW����ɽӾ���
�Ӿ��rע�⣺ “EtherCAT IN”�B����һ��ģ�K��“EtherCAT OUT”�B����һ��ģ�K��IN��OUT�ڲ��ɻ��á�
2.ͨ��ݔ���
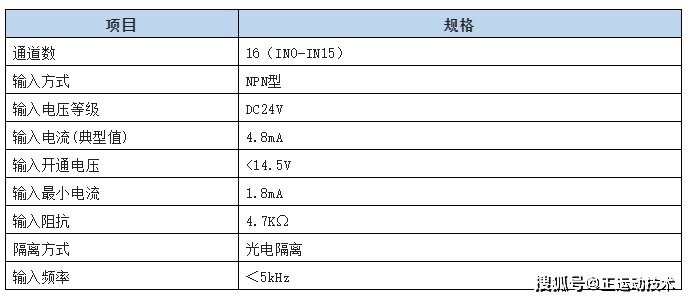
ͨ��ݔ���IN�ăȲ��·�����D���£�EIO16084��16��ͨ��ݔ��ڣ�ݔ�����ҪNODE_IO����IO��ַ��̖����ͨ�^�������˲�����ݔ��څ�����Ҋ�±���
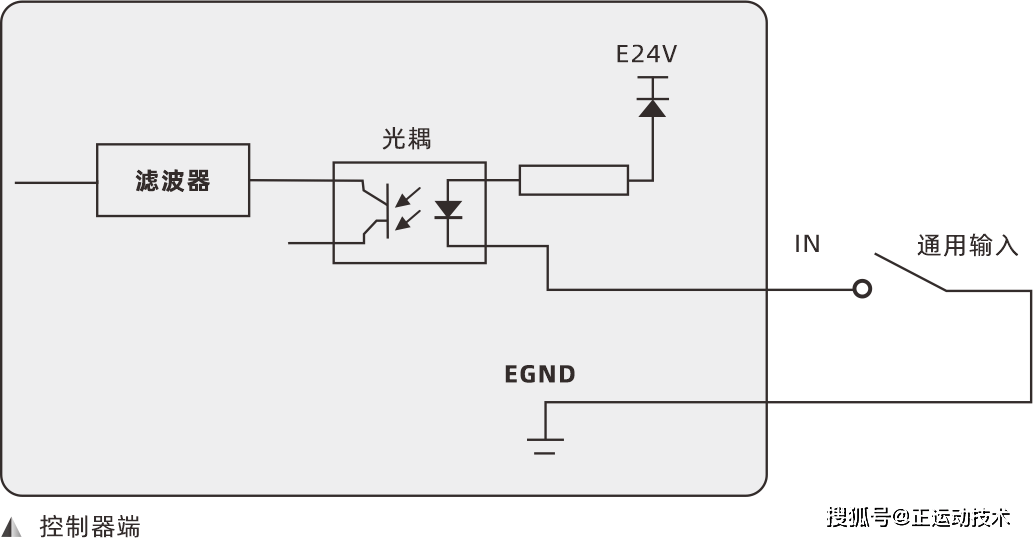 ͨ��ݔ���IN�ăȲ��·�����D ͨ��ݔ���IN�ăȲ��·�����D
ݔ��څ����f����
3.ͨ��ݔ����
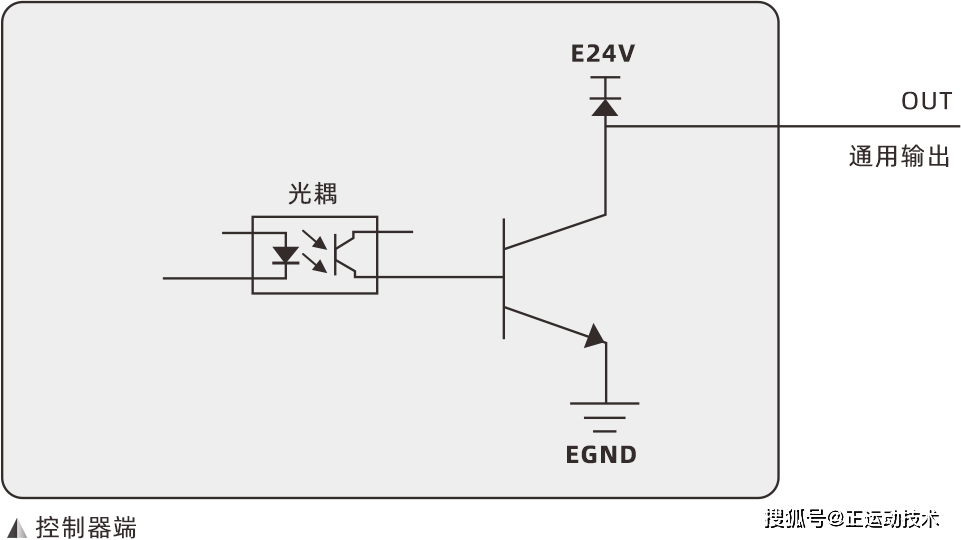
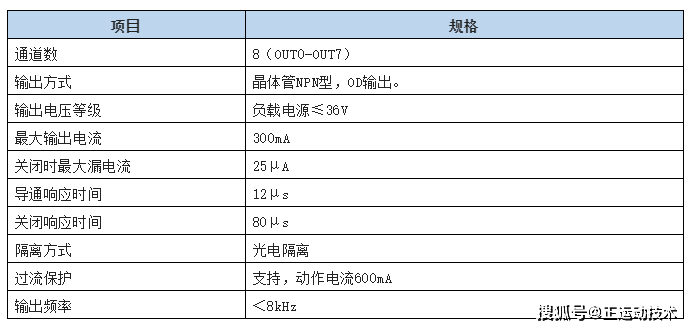
ͨ��ݔ����OUT�ăȲ��·�����D���£�EIO16084��8��ͨ��ݔ��ڣ�ݔ������ҪNODE_IO����IO��ַ��̖����ͨ�^�������˲�����NODE_IOʹ��һ�α�����ú�ݔ���ݔ������ݔ���څ�����Ҋ�±���
 ͨ��ݔ����OUT�ăȲ��·�����D ͨ��ݔ����OUT�ăȲ��·�����D
ݔ��څ����f����
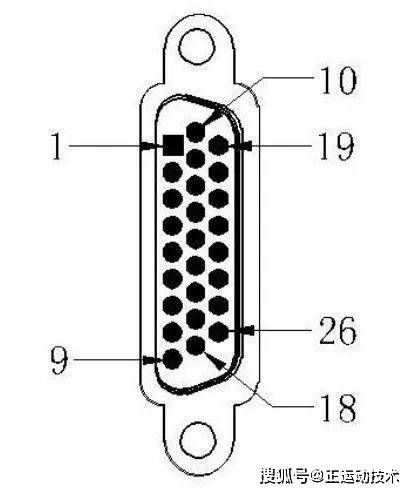
4.�S�ӿ�
EIO16084���S�ӿ���4��������DB26��_����_���x���±����S�ӿڰ�������}�_ݔ��Ͳ�־��a��ݔ����̖��ͬ�r߀�Ѓ�·ͨ��ݔ��ڣ�����һ·���ݔ�룩����·ͨ��ݔ���ڣ�����һ·����ʹ�ܣ���
EIO16084�Uչ�S�r���鿂���D�}�_�����}�_���������뵽EIO16084�Uչģ�K�ϵ��}�_�S�ӿ��ϡ�ͨ�^������ʼ������EtherCAT������������EIO16084�Uչģ�K֮�g��ͨӍ�B�ӣ�������ʼ���^���б�횰����Sӳ�䣬֮���}�_�Ϳ�������ʹ�÷��������}�_������
����ͨ�^�����ֵ�����EIO�Uչ��ֱ��ʹ���c�澯��ȱʡ��ʹ�ã���Ҫ����������������
�澯ݔ�롢λ�õ�λ��̖���Sʹ�ܡ��`��������Ԟ�ͨ�õ�ݔ��ݔ��������������ƫС���h���S����IOʹ�á�
“EGND��OVCC�Դ”�ǿ������Ȳ�ݔ�����ŷ�IOʹ�ã�Ո���B�ӵ��_�P�Դ����ʹ�Õr�ҿա�
03 �Ӿ�����
EIO16084�Uչģ�K�Ӿ�Ҏ�t��EIO16084�ɽӵ�EtherCAT�����ϵ����⹝�c��
EIO16084�鿂���ϵ�һ���O�九�c���ɽ���4���}�_����������������AXIS 0��AXIS 3��������ξ�̖��������Ŀ����ϵ�������̖Ҏ�t��
������ʹ����̖���}�_�ӿڃȵ�ͨ��ݔ���ڣ�ֱ��ͨ�^����������OPָ���ʹ�ܡ���ʹ��SDOָ�����Ô����ֵ���Ԅ�ʹ�ܺ����������o��ֱ�ӿ��ƌ�����ݔ���ځ�ʹ�ܡ�
ע�⣺�S�Uչģ�K��ʹ�Â������ǟo���Ƶģ������������ɔUչ������S����
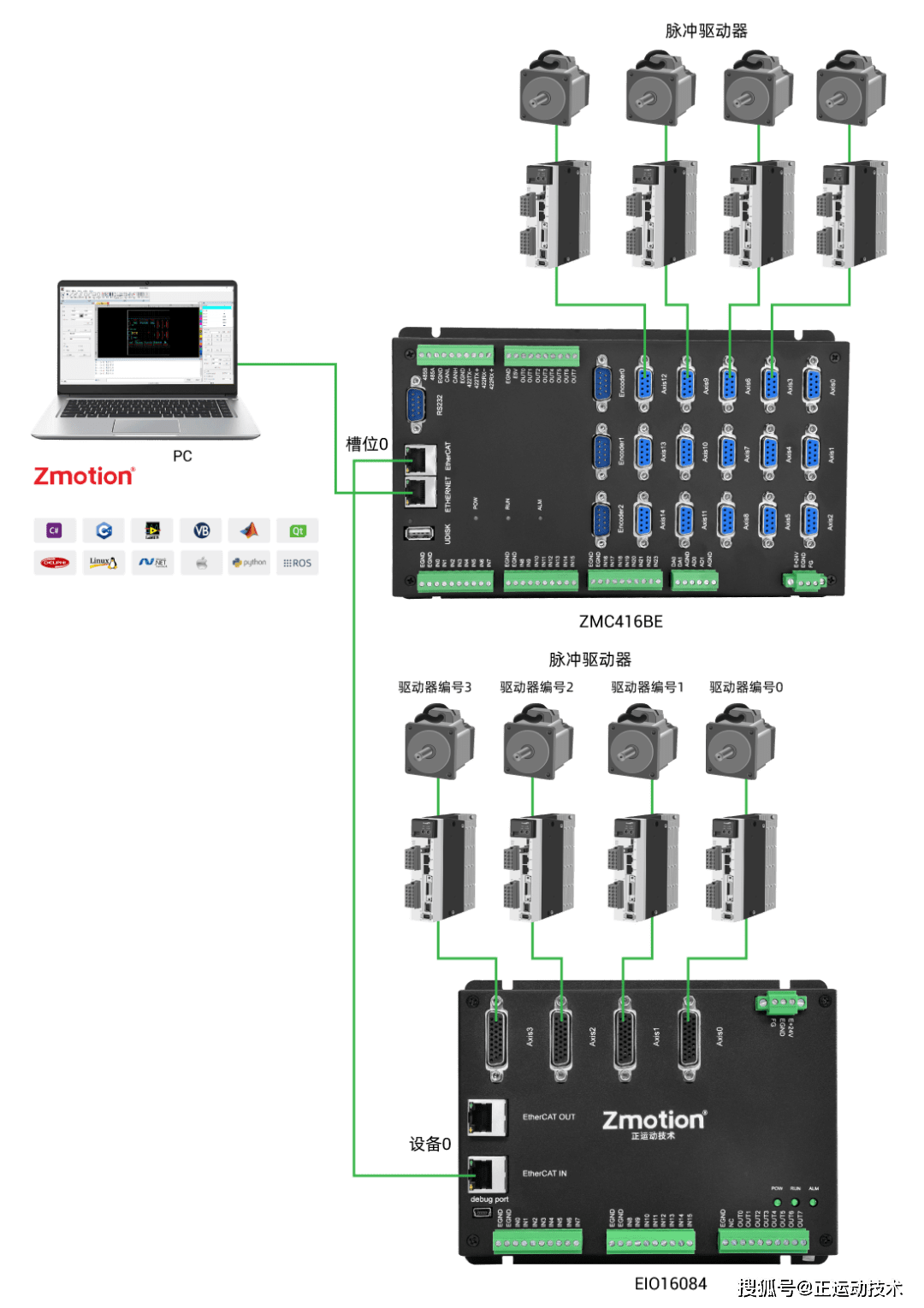
���D��ZMC416BE�\�ӿ��������w֧���B��16���}�_���������Uչ�S����20���ʿ���ͨ�^EtherCAT�����B��һ��EIO16084�Uչ��֧��20���}�_������
�Uչ�Sӳ���S̖�rע����_�����}�_�S���������}�_�Sʹ ���� 1 6 ����Ĭ�J�����S̖ 0 -15 ���t�Uչ�S�ϵ� AXIS 0-3 �������D��������̖ 0 -3 ���քe�ք�ӳ����S̖ 1 6-19 ��
���D��ZMC432�\�ӿ��������w֧���B��32���S���}�_����+Ether��CAT��������һ��32���������������wֻ��6·�}�_�ӿڣ�ͨ�^һ��EIO16084�ɔUչ4·�}�_�ӿڣ�֧���}�_�����Ϳ����������ʹ�á�
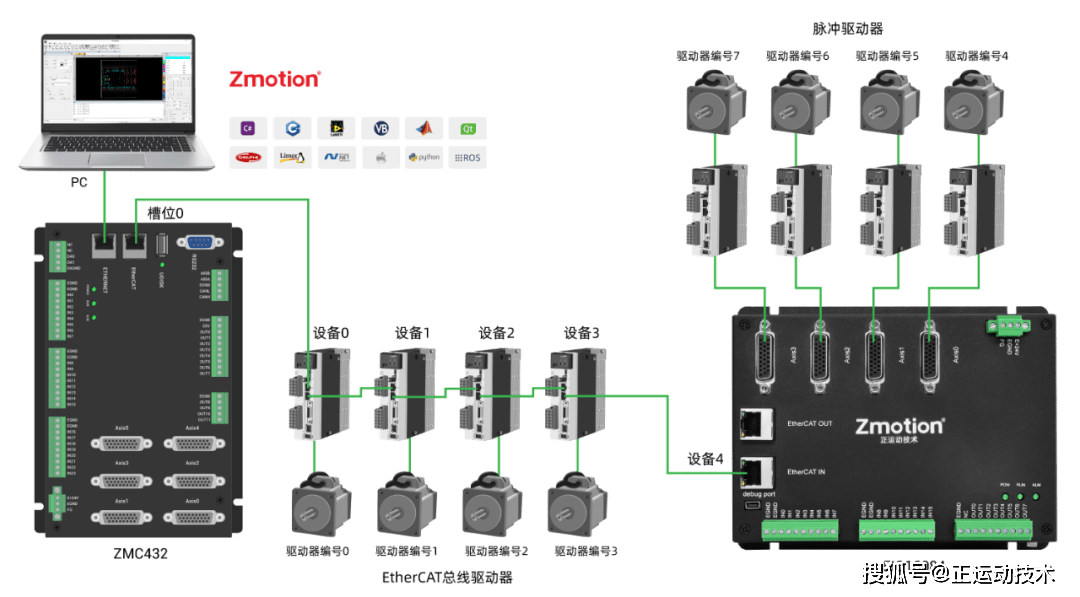
�ψD�漰�ľ�̖�������£��������Pָ������õ����¾�̖��
��1����λ̖(slot)
��λ̖��ָ�������Ͽ����ӿڵľ�̖��EtherCAT������λ̖��0��
��2���O��̖(node)
�O��̖��ָһ����λ���B�ӵ������O��ľ�̖����0�_ʼ�����O���ڿ����ϵ��B������ԄӾ�̖������ͨ�^“NODE_COUNT(slot)”ָ��鿴�������B�ӵ��O�係����
��3��������̖
���������Ԅ��R�e����λ�ϵ���������̖��0�_ʼ���������ڿ����ϵ��B������ԄӾ�̖��
������̖�c�O��̖��ͬ��ֻ�o��λ�ϵ������O�侎̖�������O����ԣ�ӳ���S̖�r�����õ�������̖��
04 �Uչ�YԴӳ�䷽��
EIO16084�Uչģ�K���Ѓ���YԴ��Ҫӳ�䣬�S�YԴ��IO�YԴ��
1.IOӳ��
�������ϳ���ֻ��ͨ�^IO��̖�Ϳ����L�����Uչģ�K�ϵ��YԴ��EtherCAT�����Uչģ�KIO��̖ͨ�^����ָ��NODE_IO���O�ã�ͬ�r����ݔ���ݔ����
IOӳ��r�Ȳ鿴���������������IO��̖(�����ⲿIO�ӿں��}�_�S�ȵĽӿ�)����ʹ��ָ���O�á�
���Uչ��IO�c����������IO��̖�غϣ����ߌ�ͬ�r�����ã�����IOӳ���ӳ��ľ�̖����������ϵ�y�о������؏͡�
IOӳ���Z����
NODE_IO(slot,node)=iobase
slot����λ̖��0-ȱʡ
node���O�侎̖����̖��0�_ʼ
iobase��ӳ��IO��ʼ��̖���O�ýY��ֻ����8�ı���
ʾ����
NODE_IO(0,0)=32 '�O�ò�λ0�ӿ��O��0��IO��ʼ��̖��32
���O��0��EIO16084���������Z�����úUչģ�K�ϵ�ͨ��ݔ���IN0-15������IO��̖���Ξ�32-47���S�ӿڃȵ�ͨ��ݔ��ھ�̖48-55�������SAXIS 0-3���ӈ�ݔ��քe��48-51��ͨ��ݔ����OUT0-7����IO��̖���Ξ�32-39���S�ӿڃȵ�ͨ��ݔ���ھ�̖40-47�������SAXIS 0-3����ʹ��ݔ���քe��40-43��
2.�Sӳ��
�Uչģ�K���Sʹ��ǰ��Ҫʹ��“AXIS_ADDRESS”ָ��ӳ���S̖���Sӳ��Ҳ��Ҫע������ϵ�y���S̖�����؏͡�EIOϵ�ДUչ�S��ӳ���c�����������Sӳ���Z����ͬ��
�Sӳ���Z����
AXIS_ADDRESS(�S̖)=(��λ̖<<16)+������̖+1
ʾ����
AXIS_ADDRESS(0)=(0<<16)+0+1 'EtherCAT�����ϵĵ�һ��������������̖0���������S0
AXIS_ADDRESS(1)=(0<<16)+1+1 'EtherCAT�����ϵĵڶ���������������̖1���������S1
����һ�����c��EIO16084��EIO16084���B������������ô�@�������0���B����EIO16084�ϵĵ�һ���}�_��������t����EtherCAT����������
05 ��չ�}�_�S��ʹ�÷���
EIO16084�Uչģ�K��Ҫ���^������ʼ��֮�����ʹ�ã��҂��@���һ���}�_�������ӵ�EIO16084�Uչģ�K�ϵ�AXIS 0�ӿ��ϣ�ʹ�ò��E���¡�
��һ�������п�����ʼ������Ҋ�¹�������ʼ���^�����R�eEIO�Uչģ�K���O�侎̖���B�ӵ�������̖������������̖�����Sӳ�䣬�����O��̖�����Uչģ�K��IOӳ�䣬�O��DRIVE_PROFILE��ATYPE��
�ڶ�������ʼ���ɹ���ʹ��EIO16084�Uչģ�K�ϵ��}�_������ͬ��Ҳ�Dz����}�_�S�ӿڃȵ�OP��̖ʹ�����������ڔUչģ�Kӳ�����ʼ��̖��32���@���AXIS 0-AXIS 3�ڃȵ�ʹ����̖����ͨ��ݔ���ھ�̖��40-43����ݔ���ڴ��ڃȰ���OP(40)���ڳ����Ј���ָ��OP(40,ON)����ʹ��AXIS 0��������
��������ʹ������O�����P�S�������ٰl���\��ָ������늙C��
�ڳ�ʼ�������ɹ����������R�eԓ�Uչģ�K���ɲ鿴�Uչģ�K�ϵ��S�ӿڔ���IOӳ���ɲ鿴ݔ��ݔ���ľ�̖������
�����O����ʼ��̖��32��ԓ�Uչģ�K�ϵ�ݔ�뾎̖���ⲿ�Ԏ���16�c+�S�ӿ�ͨ��ݔ��8�c��һ��24�c������32-55��ݔ����̖���ⲿ�Ԏ���8�c+�S�ӿ�ͨ��ݔ��8�c��һ��16�c������32-47��
EIO16084ʹ��ע����헣�
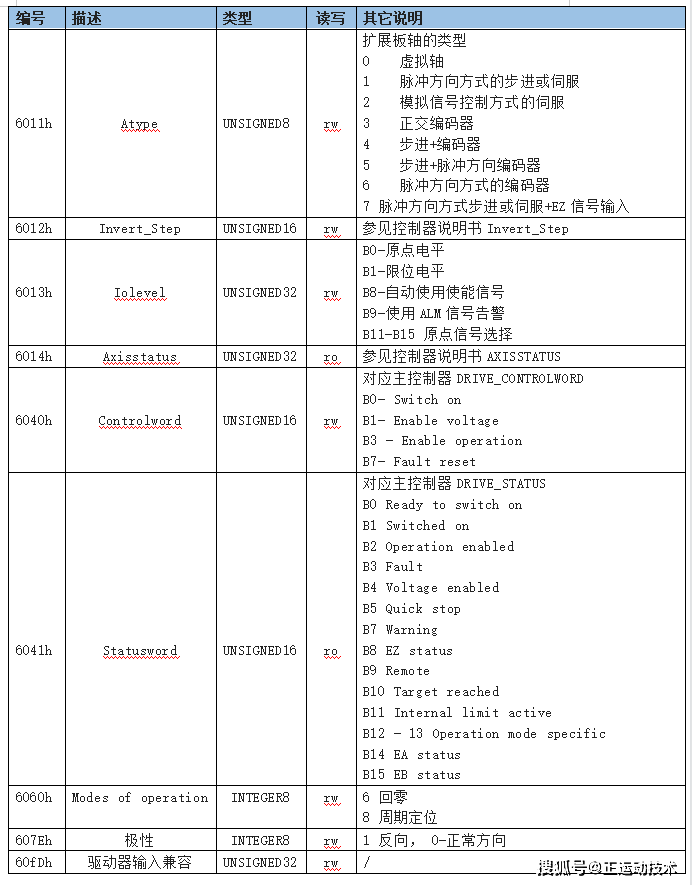
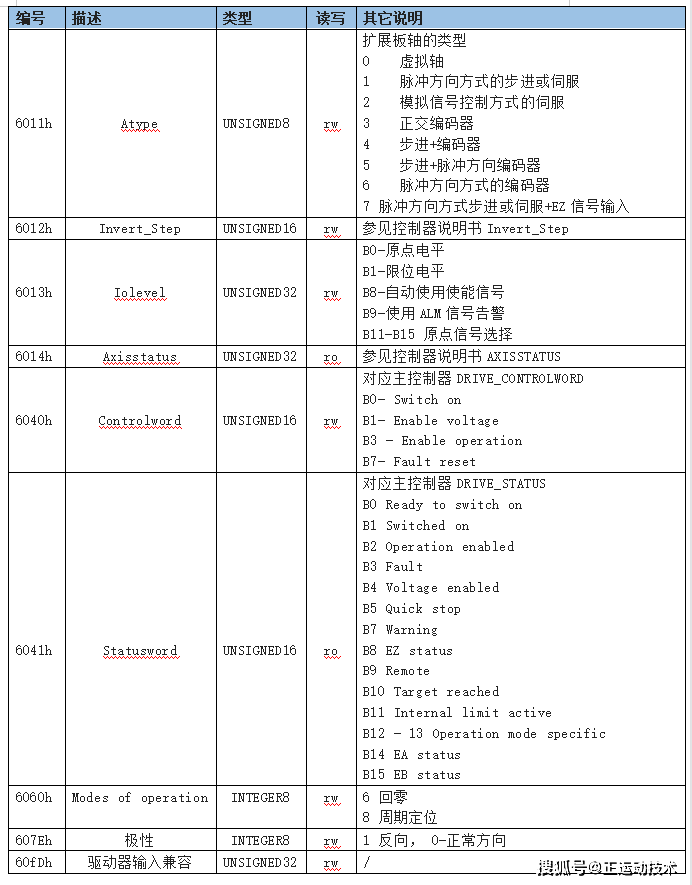
�Uչģ�K�ϵ�IO�����Л]��ʹ�ö���Ҫʹ��NODE_IOָ��ӳ��EIO16084��ݔ��ݔ����̖���Uչģ�K��DRIVE_PROFILE���Þ�0��ATYPE�O��65�������H�������}�_���������S��Ͳ�����65���挍�S��͵�����ʹ��SDOָ�����Ô����ֵ�6011h�O�á�
��ʼ���^�������a��Ӳ��λ�������S�������ڌ�Ӳ��λFWD_IN��REV_IN��ӳ�侎ָ̖��-1����ʾ��ӳ�䣬��Ҫ������λ�_�P�r��ȥ��FWD_IN��REV_IN��
EIO16084�Uչģ�K�O�ã�
ͨ�^SDOָ���x�������ֵ��O�ã�ֻ�_���˲��֔����ֵ乩�O�ã�������������ʹ������ܛ���ġ�
SDOָ������ݔ��ݔ����
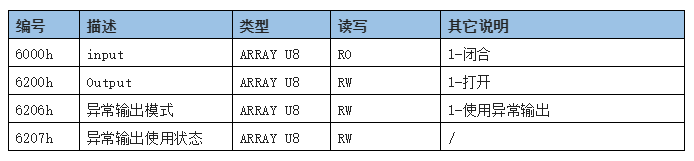
SDOָ����������������
���磺�Uչ���}�_�S���挍�S����O��ͨ�^�����ֵ�6011h�O�ã��������±��ą��������S̖�����O�ã���һ�������O�Ô����ֵ�6011h+0*800h���ڶ��������O��6011h+1*800h���Դ���ƣ�ÿ��������800h����������ͬ����
�����ֵ��xȡ�Z����
SDO_READ (��λ̖, �O�侎̖, �����ֵ侎̖, �����ֵ��Ӿ�̖, �������, �xȡ�����惦TABLEλ��)
SDO_READ_AXIS (�S̖, �����ֵ侎̖, �����ֵ��Ӿ�̖, �������, �xȡ�����惦TABLEλ��)
�����ֵ䌑���Z����
SDO_WRITE (��λ̖, �O�侎̖, �����ֵ侎̖, �����ֵ��Ӿ�̖, �������, ���딵��ֵ)
SDO_WRITE_AXIS (�S̖, �����ֵ侎̖, �����ֵ��Ӿ�̖, �������, ���딵��ֵ)
�����ֵ��x��ʾ����
global sub Sub_SetNodePara(iNode,iVender,iDevice,Iaxis)
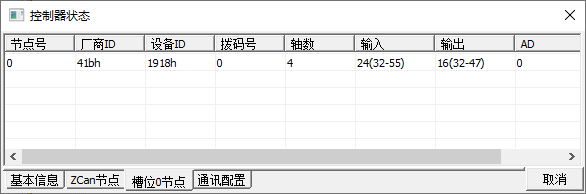
if iVender = $41B and iDevice = $1918 then '���\��16084�}�_�Uչ�S
SDO_WRITE(Bus_Slot,iNode,$6011+Iaxis*$800,0,5,4) '�O�ÔUչ�}�_�SATYPE��ͣ�ֵ��4��ʾ�}�_�;��a����̖��ͬһ���S̖��
SDO_WRITE(Bus_Slot,iNode,$6012+Iaxis*$800,0,6,0) '�O�ÔUչ�}�_�SINVERT_STEP�}�_ݔ��ģʽ��ģʽ0���}�_+����
NODE_IO(Bus_Slot,iNode) = 32 + 32*iNode '�O��16084��IO����ʼӳ���ַ
endif
end sub
����Uչģ�K֮��߀�B����EtherCAT������ʹ�Õrע�⿂�������O�䔵�����O�ã�EtherCAT�����ڳ�ʼ������������ʹ�ܳɹ������m�O���S���������\�У�ע���ʼ���^���е�DRIVE_PROFILE�oEtherCAT�������ú��m��PDO�б�����Ҫ�õ�����IO�r��߀�����DRIVE_IOӳ�䡣
06 ������ʼ��
�˳�ʼ��������Á���ʼ��EtherCAT������EtherCAT�����Uչģ�K������ͨӍ�B�ӣ�ͨ��ģ�壬�m���ڶ�NƷ�Ƶ���������
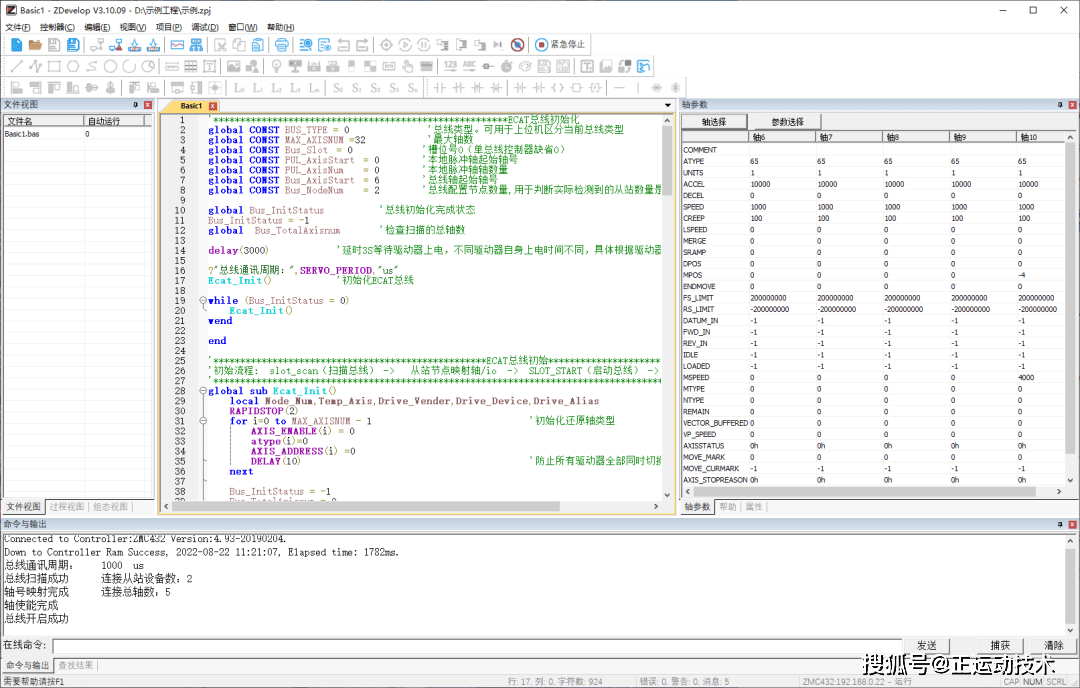
' *******************************************************ECAT������ʼ��
global CONST BUS_TYPE = 0 '������͡���������λ�C�^�֮�ǰ�������
global CONST MAX_AXISNUM =32 '����S��
global CONST Bus_Slot = 0 '��λ̖0���ο���������ȱʡ0��
global CONST PUL_AxisStart= 0 '�����}�_�S��ʼ�S̖
global CONST PUL_AxisNum = 0 '�����}�_�S�S����
global CONST Bus_AxisStart = 6 �����S��ʼ�S̖
global CONST Bus_NodeNum = 2 '�������ù��c����,�����Д����H�z�y���ď�վ�����Ƿ�һ��
global Bus_InitStatus '������ʼ����ɠ�B
Bus_InitStatus = -1
global Bus_TotalAxisnum '�z�����Ŀ��S��
delay(3000) '�ӕr3S�ȴ�������늣���ͬ����������늕r�g��ͬ�����w���������{���ӕr
?"����ͨӍ���ڣ�",SERVO_PERIOD,"us"
Ecat_Init() '��ʼ��ECAT����
while (Bus_InitStatus = 0)
Ecat_Init()
wend
end
' ****************************************ECAT������ʼ�� **********************************
'��ʼ����: slot_scan�����迂���� -> ��վ���cӳ���S/io -> SLOT_START�����ӿ����� -> ��ʼ���ɹ�
' *****************************************************************************************
global sub Ecat_Init()
local Node_Num,Temp_Axis,Drive_Vender,Drive_Device,Drive_Alias
RAPIDSTOP(2)
for i=0 to MAX_AXISNUM - 1 '��ʼ��߀ԭ�S���
AXIS_ENABLE(i) = 0
atype(i)=0
AXIS_ADDRESS(i) =0
DELAY(10) '��ֹ��������ȫ��ͬ�r�ГQʹ�܌���˲�g����^��
next
Bus_InitStatus = -1
Bus_TotalAxisnum = 0
SLOT_STOP(Bus_Slot)
delay(200)
slot_scan(Bus_Slot) '���迂��
if return then
?"��������ɹ�","�B�ӏ�վ�O�䔵��"NODE_COUNT(Bus_Slot)
if NODE_COUNT(Bus_Slot) <> Bus_NodeNum then '�Д࿂���z�y�����Ƿ�錍�H�Ӿ�����
?""
?"���蹝�c�����c�������Ô�����һ��!" ,"���Ô���:"Bus_NodeNum,"�z�y������"NODE_COUNT(Bus_Slot)
Bus_InitStatus = 0 '��ʼ��ʧ��������ʾ
return
endif
'"�_ʼӳ���S̖"
for Node_Num=0 to NODE_COUNT(Bus_Slot)-1 '��v���赽�����Џ�վ���c
Drive_Vender = NODE_INFO(Bus_Slot,Node_Num,0) '�xȡ�����S��
Drive_Device = NODE_INFO(Bus_Slot,Node_Num,1) '�xȡ�O�侎̖
Drive_Alias = NODE_INFO(Bus_Slot,Node_Num,3) '�xȡ�O��ܴaID
if NODE_AXIS_COUNT(Bus_Slot,Node_Num) <> 0 then '�Дஔǰ���c�Ƿ���늙C
for j=0 to NODE_AXIS_COUNT(Bus_Slot,Node_Num)-1 '�������c����늙C����ѭ�h�����S����(ᘌ�һ�϶�����)
Temp_Axis = Bus_AxisStart + Bus_TotalAxisnum '�S̖��NODE������
'Temp_Axis = Drive_Alias '�S̖�������O���ēܴa���䣨һ�϶���Ҫ����̎����
base(Temp_Axis)
AXIS_ADDRESS= Bus_TotalAxisnum+1 'ӳ���S̖
ATYPE=65 '�O�ÿ���ģʽ 65-λ�� 66-�ٶ� 67-�D��
Sub_SetPdo(Node_Num,Drive_Vender,Drive_Device) '�O��PDO����
Sub_SetNodePara(Node_Num,Drive_Vender,Drive_Device,j) '�O�����⿂������������EIO16084������
disable_group(Temp_Axis) 'ÿ�S�Ϊ��ֽM
Bus_TotalAxisnum=Bus_TotalAxisnum+1 '���S��+1
next
else 'IO�Uչģ�K
Sub_SetNodeIo(Node_Num,Drive_Vender,Drive_Device,1024 + 32*Node_Num) 'ӳ��Uչģ�KIO
endif
next
?"�S̖ӳ�����","�B�ӿ��S����"Bus_TotalAxisnum
DELAY 200
SLOT_START(Bus_Slot) '���ӿ���
if return then
wdog=1 'ʹ�ܿ��_�P
'?"�_ʼ��������e�`"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
BASE(i)
DRIVE_CLEAR(0)
DELAY 50
'?"�����e�`������"
datum(0) '����������S��B�e�`"
DELAY 100
'"�Sʹ��"
AXIS_ENABLE=1
next
Bus_InitStatus = 1
?"�Sʹ�����"
'�����}�_�S����
for i = 0 to PUL_AxisNum - 1
base(PUL_AxisStart + i)
AXIS_ADDRESS = (-1<<16) + i
ATYPE = 4
next
?"�����_���ɹ�"
else
?"�����_��ʧ��"
Bus_InitStatus = 0
endif
else
?"��������ʧ��"
Bus_InitStatus = 0
endif
end sub
' *****************************************�ք�����PDO* *********************************
'��������Ʒ�ƿ�����Ҫ�ք����ã���ֻ��Ҫͨ�^DRIVE_PROFILE�O���Ԅ�����������POD��������
' *******************************************************************************************
global sub Sub_SetPdo(iNode,iVender,iDevice)
IF iVender = 0 then '�Զ��xPDO
SDO_WRITE (Bus_Slot, iNode, $1c12, 0 ,5 ,0) '����PDO,���ú�ſ����ă���
DELAY(50)
SDO_WRITE (Bus_Slot, iNode, $1c13, 0 ,5 ,0)
DELAY(50)
SDO_WRITE (Bus_Slot, iNode, $1600, $0 ,5 ,0) 'RxPDO����������
SDO_WRITE (Bus_Slot, iNode, $1600, $1 ,7 ,$60400010) '������
SDO_WRITE (Bus_Slot, iNode, $1600, $2 ,7 ,$607a0020) 'Ŀ��λ��
SDO_WRITE (Bus_Slot, iNode, $1600, $3 ,7 ,$60fe0120) '����IOݔ��
SDO_WRITE (Bus_Slot, iNode, $1600, $0 ,5 ,3)
SDO_WRITE (Bus_Slot, iNode, $1a00, $0 ,5 ,0) 'TxPDO����������
SDO_WRITE (Bus_Slot, iNode, $1a00, $1 ,7 ,$60410010) '��B��
SDO_WRITE (Bus_Slot, iNode, $1a00, $2 ,7 ,$60640020) '�����
SDO_WRITE (Bus_Slot, iNode, $1a00, $3 ,7 ,$60fd0020) '����IOݔ��
SDO_WRITE (Bus_Slot, iNode, $1a00, $0 ,5 ,3)
SDO_WRITE (Bus_Slot, iNode, $1c12, 1 ,6 ,$1600) 'RxPDO���䌦��
DELAY(50)
SDO_WRITE (Bus_Slot, iNode, $1c13, 1 ,6 ,$1a00) TxPDO���䌦��
DELAY(50)
SDO_WRITE (Bus_Slot, iNode, $1c12, 0 ,5 ,1) '����PDO
DELAY(50)
SDO_WRITE (Bus_Slot, iNode, $1c13, 0 ,5 ,1)
SDO_WRITE (Bus_Slot, iNode, $1C32, $1 ,6 ,2) '�O��DCͬ��ģʽ
SDO_WRITE (Bus_Slot, iNode, $1C33, $1 ,6 ,2)
DRIVE_PROFILE = -1 'ʹ����ȱʡPDO����
elseif iVender = $66f then
DRIVE_PROFILE = 4
else
DRIVE_PROFILE = 0
endif
end sub
' ***************************************��վ���c���Ⅲ������*****************************
'ͨ�^SDO��ʽ�Č��������ֵ��ֵ�ď�վ����(���w�����ֵ�鿴�����փ�)
' **********************************************************************************************
global sub Sub_SetNodePara(iNode,iVender,iDevice,Iaxis)
if iVender = $41B and iDevice = $1918 then '���\��EIO16084�}�_�Uչ�S
SDO_WRITE(Bus_Slot,iNode,$6011,Iaxis*$800,5,4) '�O�ÔUչ�}�_�SATYPE���
SDO_WRITE(Bus_Slot,iNode,$6012,Iaxis*$800,6,0) '�O�ÔUչ�}�_�SINVERT_STEP�}�_ݔ��ģʽ
NODE_IO(Bus_Slot,iNode) = 32 + 32*iNode '�O��16084��IO����ʼӳ���ַ
elseif iVender = $66f then '��������
SDO_WRITE(Bus_Slot,iNode,$3401,0,4,$10101) '����λ�ƽ $818181
SDO_WRITE(Bus_Slot,iNode,$3402,0,4,$20202) 'ؓ��λ�ƽ $828282
SDO_WRITE(Bus_Slot,iNode,$6091,1,7,1) '�X݆��
SDO_WRITE(Bus_Slot,iNode,$6091,2,7,1)
SDO_WRITE(Bus_Slot,iNode,$6092,1,7,10000) '늙CһȦ�}�_��
SDO_WRITE(Bus_Slot,iNode,$607E,0,5,224) '늙C����0-���D224
SDO_WRITE(Bus_Slot,iNode,$6085,0,7,4290000000) '�����p�ٶ�
'SDO_WRITE(Bus_Slot,iNode,$1010,1,7,$65766173) '��EPPROM(��EPPROM��������Ҫ�������)
elseif iVender = $100000 then '�R������
SDO_WRITE(Bus_Slot,iNode,$6091,1,7,1) '�X݆��
SDO_WRITE(Bus_Slot,iNode,$6091,2,7,1)
endif
end sub
' ********************************����IOģ�Kӳ��**************************************
'ͨ�^NODE_IO(Bus_Slot,Node_Num)����ģ�KIO��ʼ��ַ
' ******************************************************************************************
global sub Sub_SetNodeIo(iNode,iVender,iDevice,i_IoNum)
if iVender = $41B and iDevice = $130 then '���\��EIO1616
NODE_IO(Bus_Slot,iNode) = i_IoNum
endif
end sub
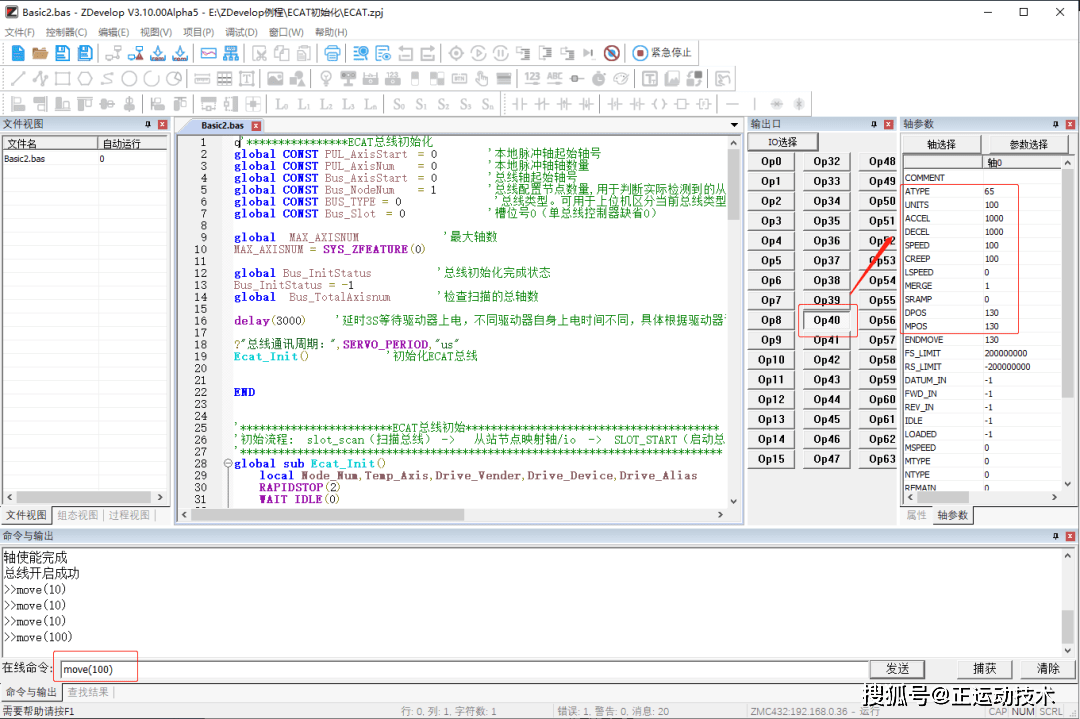
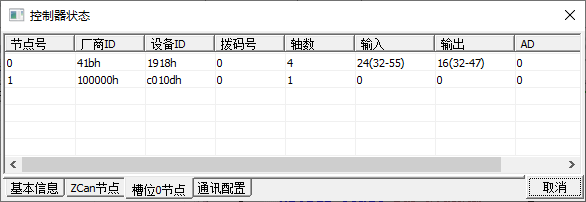
�������ò��ÿ����������B��һ�� EIO1 6084 �Uչģ�K��һ�� EtherCAT�����������������ϳ�ʼ�����ɹ�����ͨӍ�B�ӣ���������B�����@ʾ��ǰ�����B�ӵĹ��c��r��
�����ϵ���վ����������������B�ӵĵ�һ����վ�O���EIO16084�Uչģ�K���ڶ�����վ�O���EtherCAT�����������]��ʹ�ÿ������ı����}�_�S�ӿڡ������ϵ����O��ӳ���S̖���ԏ�6�_ʼ��EIO16084�Uչģ�K��AXIS 0-3�ӿ��ϵ��}�_����ӳ����S̖6-9��EtherCAT��������ӳ����S̖10��EIO16084�Uչģ�K��IO��̖��ʼ��32��
ע�⣺ӳ����S̖��IO��̖��������ϵ�y�в����؏ͣ��������w��rȥ�x��̖��
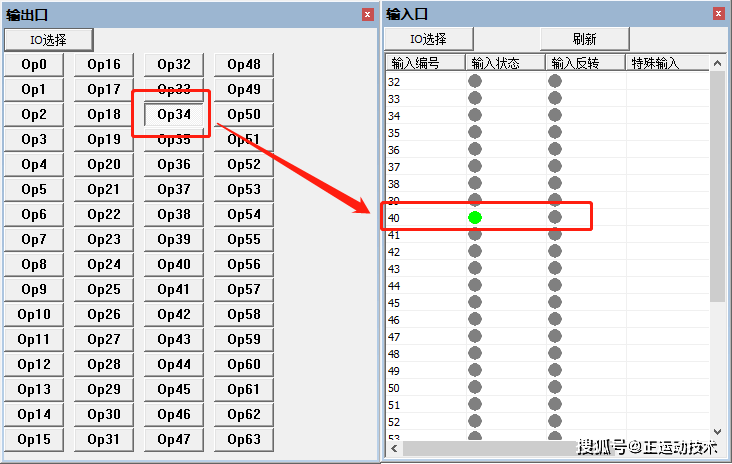
�ڛ]��IO�O�����r�£��҂�����ͨ�^OUT��IN�˿�ֱ�����B�Д�IO��푑���r�����D���yԇEIO�Uչģ�K��IO���ã���EIO��OUT2(ӳ�侎̖34)�����B�ӵ�EIO��IN8��ӳ�侎̖40���ϣ�����OP(34)��Ҋݔ���40�յ���̖��
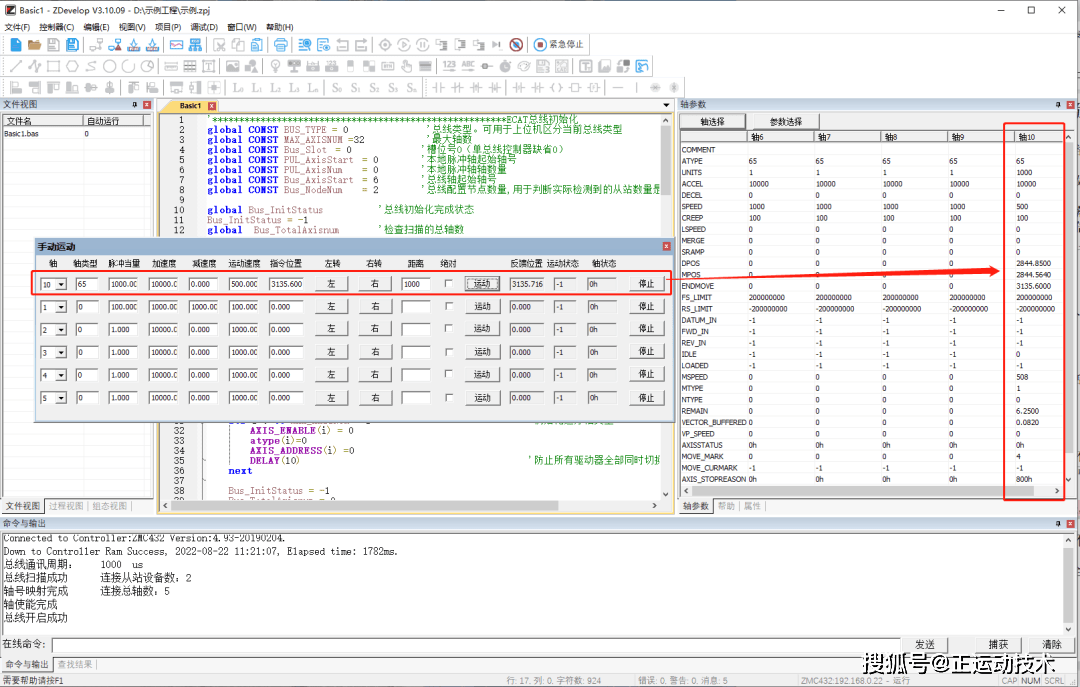
EtherCAT������ʼ�����к������S�������l���\��ָ���ɿ���늙C�\�У����D��ͨ�^�ք��\�Ӵ��ڣ����ٙz�yEtherCAT���������ܷ������\�С�
���ྫ�ʃ���Ո�Pע“���\��С����”����̖����Ҫ���P�_�l�h���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ��
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���aƷ���аl���LJ��Ҽ����¼��g��I�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă����˲ţ��ڈԳ��������µ�ͬ�r���e�O�ϸ����У�fͬ�\�ӿ��ƻ��A���g���о����LJ��ȹ����I��lչ������I֮һ��Ҳ�LJ������С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I����Ҫ�I���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ�ȵȡ�
|

