--��ʾ���������@�������ܮa(ch��n)Ʒ�ṩһվʽ�����@ʾ+�B��+�ƶ˷���(w��)+APPܛ���_�l(f��)���S�o(h��)�Ƚ�Q�������͏S�̿��ٌ�(sh��)�F(xi��n)Ӳ�������ܻ������醢���ƶ����·�����˾���҂������������_�l(f��)С������_�l(f��)�^���п��ܕ�(hu��)�����Ć��}�Լ��������ֵĺ����̳̣�ͬ�r(sh��)Ҳ�����������B��+�@ʾ��(y��ng)�õ��·�����ϣ�����ܵ�һ�r(sh��)�g�˽Ⲣ�������Ϻõķ����ͮa(ch��n)Ʒ��--
## һ��LED PWM ������
### 1������
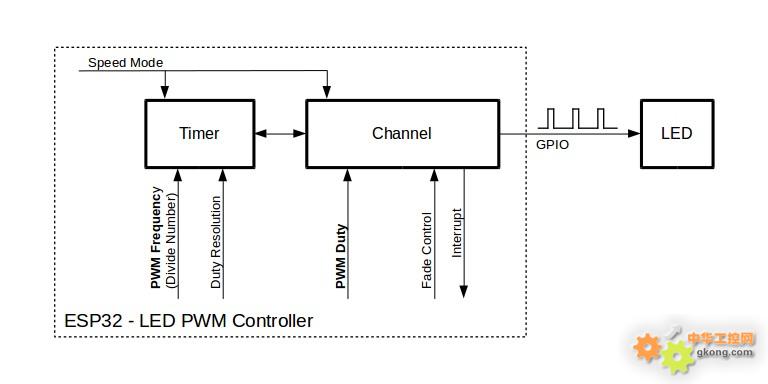
LED ������ (LEDC) ��Ҫ���ڿ��� LED��Ҳ�ɮa(ch��n)�� PWM ��̖(h��o)���������O(sh��)��Ŀ��ơ� ԓ�������� 16 ·ͨ�������Ԯa(ch��n)����(d��)���IJ����(q��)��(d��ng) RGB LED ���O(sh��)�䡣
LEDC ͨ�����ЃɽM���քe�� 8 ·����ͨ���� 8 ·����ͨ��������ͨ��ģʽ��Ӳ���Ќ�(sh��)�F(xi��n)�������Ԅ�(d��ng)�ҟo�ɔ_�ظ�׃ PWM ռ�ձȡ�����ͨ��ģʽ�£�PWM ռ�ձ���Ҫ��ܛ���е��(q��)��(d��ng)����׃��ÿ�Mͨ��������ʹ�ò�ͬ�ĕr(sh��)�Դ��
LED PWM ���������ڟo�� CPU ���A(y��)����r���Ԅ�(d��ng)��׃ռ�ձȣ���(sh��)�F(xi��n)���Ⱥ��ɫ�u׃��
[����](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html)
�O(sh��)�� LEDC ͨ���� [����ģʽ�����ģʽ](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#ledc-api-high-low-speed-mode) ���\(y��n)�У���Ҫ�M(j��n)���������ã�
1. [���r(sh��)������](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#ledc-api-configure-timer) ָ�� PWM ��̖(h��o)���l�ʺ�ռ�ձȷֱ��ʡ�
��һ��(g��)���x���E�ǿ����ڝu׃�K���O(sh��)��һ��(g��)�Дࡣ
�ڽ��ESP32�ϵ�PWM����֮ǰ���҂�ӑՓһЩ�cPWM���P(gu��n)���g(sh��)�Z��
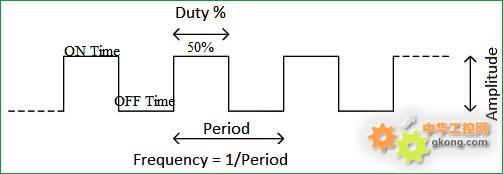
�� **TON����(d��o)ͨ�r(sh��)�g��**����̖(h��o)����ƽ�r(sh��)�ij��m(x��)�r(sh��)�g��
�� **TOFF���P(gu��n)���r(sh��)�g��**����̖(h��o)����ƽ�r(sh��)�ij��m(x��)�r(sh��)�g��
�� **����**��PWM��̖(h��o)�Č�(d��o)ͨ�r(sh��)�g���P(gu��n)���r(sh��)�g֮�͡�
�� **ռ�ձ�**��PWM��̖(h��o)���ڃ�(n��i)��̖(h��o)����ƽ�ĕr(sh��)�g�ٷֱȡ�
? ���磬��������ڞ�10ms���}�_���� ON���ߣ�5ms��Ȼ��ռ�ձȌ��飺ռ�ձ� = 5/10 * 100 = 50%
�� **PWM���l�ʣ�**PWM��̖(h��o)���l�ʛQ����PWM���һ��(g��)���ڵ��ٶȡ�һ��(g��)������һ��(g��)PWM��̖(h��o)������ON��OFF�����ψD��ʾ��
### 2�����ö��r(sh��)��
Ҫ�O(sh��)�ö��r(sh��)�������{(di��o)�ú���(sh��) [`ledc_timer_config()`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv417ledc_timer_configPK19ledc_timer_config_t)�����������������Å���(sh��)�Ĕ�(sh��)��(j��)�Y(ji��)��(g��u) [`ledc_timer_config_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv419ledc_timer_config_t) ���f�oԓ����(sh��)��
- �ٶ�ģʽ [`ledc_mode_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv411ledc_mode_t)
�l�ʺ�ռ�ձȷֱ�����P(gu��n)(li��n)��PWM �l��Խ�ߣ�ռ�ձȷֱ���Խ�ͣ���֮��Ȼ����� API �����Á���׃ LED ���ȣ�������������Ŀ�ģ��@�N��P(gu��n)ϵ���ܕ�(hu��)����Ҫ��������ϢԔҊ [�l�ʺ�ռ�ձȷֱ���֧�ַ���](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#ledc-api-supported-range-frequency-duty-resolution) һ��(ji��)��
�r(sh��)�Դͬ�ӿ�������PWM�l�ʡ��x��ĕr(sh��)�Դ�l��Խ�ߣ��������õ�PWM�l������Խ�ߡ�
�r(sh��)����Q
�r(sh��)��l��
�ٶ�ģʽ
�r(sh��)犹���
APB_CLK
80 MHz
���� / ����
/
REF_TICK
1 MHz
���� / ����
֧�ք�(d��ng)�B(t��i)�{(di��o)�l��DFS������
RTC8M_CLK
~8 MHz
����
֧�ք�(d��ng)�B(t��i)�{(di��o)�l��DFS�����ܣ�֧��Light-sleepģʽ
**ͨ������**
���r(sh��)���O(sh��)�úú�Ո(q��ng)���������ͨ����[`ledc_channel_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv414ledc_channel_t) ֮һ��������ͨ�����{(di��o)�ú���(sh��) [`ledc_channel_config()`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv419ledc_channel_configPK21ledc_channel_config_t)��
ͨ���������c���r(sh��)���O(sh��)����ƣ�����ͨ�����ú���(sh��)���f����ͨ�����Å���(sh��)�ĽY(ji��)��(g��u)�w [`ledc_channel_config_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv421ledc_channel_config_t) ��
�˕r(sh��)��ͨ����(hu��)���� [`ledc_channel_config_t`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv421ledc_channel_config_t) �������_ʼ�\(y��n)���������x���� GPIO �������ɶ��r(sh��)���O(sh��)��ָ�����l�ʺ�ռ�ձȵ� PWM ��̖(h��o)����ͨ���\(y��n)���^���У������S�r(sh��)ͨ�^�{(di��o)�ú���(sh��) [`ledc_stop()`](https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32/api-reference/peripherals/ledc.html#_CPPv49ledc_stop11ledc_mode_t14ledc_channel_t8uint32_t) ���䕺ͣ��
### 3��ʾ��
```c
ledc_timer_config_t ledc_timer = {
ledc_timer_config(&ledc_timer);
ledc_channel_config(&ledc_channel);
while (1) {
## ����Motor Control Pulse Width Modulator(MCPWM)
### 1������
ESP32�Ѓɂ�(g��)MCPWM��Ԫ�������ڿ��Ʋ�ͬ��͵�늙C(j��)��ÿ��(g��)��Ԫ������(du��)PWMݔ����
**����**��
- PWMݔ��
ÿ��(g��)A/B��(du��)��������(g��)���r(sh��)���е��κ�һ��(g��)MCPWM���r(sh��)��0��1��2�е��κ�һ��(g��)�r(sh��)犡�����ͬ�Ķ��r(sh��)�������ڕr(sh��)状���(du��)PWMݔ����
���ψD�҂����y�l(f��)�F(xi��n)��MCPWM���еĹ��ܣ��ψD��ɫ��̓�����У�
- `OPERATOR `������ģ�K
**1��������ģ�K Operator**
**�����T (Operator) ���ڲ����B�ӵ�MCPWM��Ԫ��늙C(j��)��**�����׃���D(zhu��n)����형r(sh��)ᘻ���r(sh��)ᘣ������׃�D(zhu��n)�١�
? �����Tݔ��һ���� 3 ��(du��)���҂����Ԍ�(du��)��ʩ�ӿ�����̖(h��o)����(bi��o)ӛ��“A”��“B”�ķQ��һ��(du��)��A��B�����Լ���(du��)��(y��ng)������“Generator”����ģ�K���(q��)��(d��ng)�T��PWM��ݔ����̖(h��o)��
? �����ṩPWM��̖(h��o)��ÿ��(g��)Operator����������(g��)���õĶ��r(sh��)����MCPWM Timer���е��κ�һ��(g��)�M(j��n)��Ӌ(j��)�r(sh��)��
? ���˺���API��API��(hu��) �Ԅ�(d��ng)�P(gu��n)(li��n) ������ͬ����`Timer`���(q��)��(d��ng)`Operator`������`Timer 0`�c`Operator 0`�P(gu��n)(li��n)��
**2�����@ģ�K Capture**
? ��(du��)�ڟoˢֱ��늙C(j��)�����Ƶ�Ҫ��֮һ�ǸБ�(y��ng)�D(zhu��n)��λ�á�
? ��������@һ�΄�(w��)��ÿ��(g��) MCPWM��Ԫ�ṩ����(g��)����ݔ���Լ����õ�Ӳ����ԓӲ���܉�z�y(c��)ݔ����̖(h��o)��߅�������y(c��)����̖(h��o)֮�g�ĕr(sh��)�g��
? ��ˣ�����ܛ�������Σ�CPU���ʿ������������΄�(w��)��
ע�⣺3��(g��)Capture�����ڲ�ʹ��PWMݔ���r(sh��)**�Ϊ�(d��)ʹ��**����ֻ����Capture��(sh��)�F(xi��n)߅�����@���ܡ�**���MCPWM߀�����ڷ�늙C(j��)���O(sh��)**�����磬ʹ��MCPWM��Capture0ȥ���@**HC-SR04**����ģ�KECHO���_�ĸ��ƽ�r(sh��)�g���M(j��n)����(sh��)�F(xi��n)�y(c��)�ࡣ
**3������̎����ģ�K Fault Detect**
- �i��ݔ���Į�(d��ng)ǰ��B(t��i)
- �O(sh��)�õ�ݔ��
- �O(sh��)�ø�ݔ��
- �_�P(gu��n)ݔ��
�Ñ���(y��ng)�_��늙C(j��)���ܵĹ���ģʽ�Լ��ڙz�y(c��)���ض����ϕr(sh��)��(y��ng)��ȡ���Є�(d��ng)��
���磺��(du��)��ˢ늙C(j��)�(q��)��(d��ng)����ݔ����ͣ���?q��)����M(j��n)늙C(j��)�i�������B(t��i)�ȡ��@��(g��)��(d��ng)����(hu��)ʹ늙C(j��)̎�ڰ�ȫ��B(t��i)���Ԝp�ٹ�����ɵēp�ĵĿ����ԡ�
**4���d�� Carrier���� Interrupts**
? ͨ�^�{(di��o)��`mcpwm_isr_register()`����ע��(c��)MCPWM�Д�̎������
### 2��ʹ�� MCPWM ݔ�� PWM ��̖(h��o)
#### 2.1 ��(chu��ng)��MCPWM
��ʼ��MCPWM��Ҫ�IJ��E��
- ����GPIO��
- ��һ��(g��)`mcpwm_config_t`�Y(ji��)��(g��u)�w���O(sh��)�ö��r(sh��)���l�ʺͳ�ʼ�΄�(w��)���O(sh��)�á�
- �DZ�횣��O(sh��)�ö��r(sh��)���ֱ��ʣ�Ĭ�J(r��n)��10,000,000����ʹ�ú���(sh��)`mcpwm_group_set_resolution() `�� `mcpwm_timer_set_resolution()`
1������GPIO�ڣ�ʹ�ú���(sh��)mcpwm_gpio_init()��(sh��)mcpwm_set_pin()��
���ߵą^(q��)�e��ǰ�ߞ�ָ���Ĺ������� GPIO����������һ�����������е�GPIO��
**mcpwm_gpio_init()** //��ʼ��һ��(g��)GPIO
```c
**mcpwm_set_pin()** //���������cMCPWM���P(gu��n)��GPIO
```c
2������mcpwm����(sh��)
ͨ�^����(sh��)`mcpwm_init()`�����fһ��(g��)`mcpwm_config_t`�Y(ji��)��(g��u)�wָ�
**mcpwm_init()**
```c
//ʾ��
#### 2.2 PWM��̖(h��o)����
- **1���O(sh��)�Þ�ȫ�٣���PWM��̖(h��o)��**
**mcpwm_set_signal_high(��low) ()** // �O(sh��)��MCPWM��ij��(g��)generator��̖(h��o)���[���]
```c
- **2���O(sh��)��PWM��̖(h��o)**
**mcpwm_set_duty (in_us) ����** //�O(sh��)��ռ�ձ�
```c
**mcpwm_set_duty_type()** //�O(sh��)��ռ�ձ���ͣ����֏�(f��)PWMݔ��
```c
- **3������(d��ng)ݔ��**
**mcpwm_start(��stop��()** // ����(d��ng)[���P(gu��n)�]]MCPWMݔ��
```c
### 3��ʾ��
ʹ��mcpwm�(q��)��(d��ng)ֱ��늙C(j��)
```c
#define GPIO_PWM0A_OUT 15 //�O(sh��)�� GPIO 15 ���� PWM0A
//---------늙C(j��)��ǰ�Ƅ�(d��ng)
//--------- 늙C(j��)����Ƅ�(d��ng)
mcpwm_set_duty_type(mcpwm_num, timer_num, MCPWM_OPR_B, MCPWM_DUTY_MODE_1);
//---------늙C(j��)ֹͣ
//---------��ֱ��늙C(j��)����MCPWM
//2. ��ʼ�� mcpwm ����
while (1)
void app_main(void)