|
ժ Ҫ����B�˷����(n��i)��W(w��ng)�Ĺ���ԭ������ij�댍(sh��)�����ϵ�y(t��ng)�еđ�(y��ng)�á��Y(ji��)��ԓ����ϵ�y(t��ng)�����c(di��n)����Ҫ��Ԕ��(x��)ӑՓ��һ�N�m�õķ����(n��i)��ͨ�Ņf(xi��)�h���O(sh��)Ӌ������ԓͨ�Ņf(xi��)�h�ѽ�(j��ng)�ɹ���(y��ng)����ij�댍(sh��)�����ϵ�y(t��ng)�С�
�����P(gu��n)�I�~����(sh��)�r�W(w��ng)�j(lu��), �댍(sh��)�����, �����(n��i)��W(w��ng) GEPCI5565 �����(n��i)�濨 �����(n��i)�濨�r�� �����(n��i)�����
1��������
�댍(sh��)������ַQ��Ӳ���ڻ�·�з���(Hardware-in-the-loop,���QHIL)����һ�N�ڷ���ϵ�y(t��ng)�н��댍(sh��)���ȡ������(y��ng)���ֵĔ�(sh��)�W(xu��)ģ�͵ķ��档��ͨ�^(li��n)�W(w��ng)���g(sh��)��������C(j��)�B����һ���Ա��C��(ji��)�c(di��n)֮�g�Ĕ�(sh��)��(j��)���f����(sh��)�r���ǰ댍(sh��)�����Ļ���Ҫ��
���y(t��ng)�ľW(w��ng)�j(lu��)���g(sh��)������̫�W(w��ng)��FDDI���ڌ�(sh��)�r��(y��ng)���д����������ȱ�c(di��n)����(sh��)��(j��)��ݔ���ʲ��ߣ��ھW(w��ng)�j(lu��)ؓ(f��)�d�^��r���W(w��ng)�ϔ�(sh��)��(j��)��ݔ���t�^�������t���в����A(y��)���ԣ��W(w��ng)�j(lu��)ͨ����Ҫ�����S��W(w��ng)�j(lu��)�f(xi��)�h����ɣ�������ͨ��Ч��[2]��
�����(n��i)��W(w��ng)��Reflective memory network����һ�N���ڸ��پW(w��ng)�j(lu��)�Ĺ����惦�����g(sh��)�Č�(sh��)�r�W(w��ng)�j(lu��)���c���y(t��ng)��(li��n)�W(w��ng)���g(sh��)��ȣ������˾��Ї�(y��n)��Ă�ݔ�_���ԺͿ��A(y��)�y���⣬߀�����ٶȸߡ�ͨ�Ņf(xi��)�h���Ρ������C(j��)ؓ(f��)�d�p��ܛӲ��ƽ�_�m��(y��ng)�ԏ�(qi��ng)��֧���Д���̖�Ă�ݔ?sh��)����c(di��n)[5]���ڱ�ϵ�y(t��ng)�У�����Ď����ڞ�ms�������y(t��ng)�W(w��ng)�j(lu��)���g(sh��)�o���M��ϵ�y(t��ng)�ĸߌ�(sh��)�r��Ҫ�����Բ���VMIC��˾��֧��PCI�����ķ����(n��i)�濨(Reflective memory)VMIPCI-5565�M����(sh��)�r�W(w��ng)�j(lu��)��
2�������(n��i)��W(w��ng)����ԭ��
�����(n��i)��W(w��ng)��Ҫ���ɷ����(n��i)���ͨ�^���w�Ȃ�ݔ���|(zh��)�B�Ӷ��ɵġ�ÿ�������(n��i)��嶼ռ��һ��(n��i)���ַ���W(w��ng)���κ�Ӌ��C(j��)�ط����(n��i)��匑��(sh��)��(j��)�r��ԓ��(sh��)��(j��)������(y��ng)�ă�(n��i)���ַ�����V�����W(w��ng)���������������(n��i)��岢�惦����ͬ��λ��[2]�����ǣ�Ӌ��C(j��)����(sh��)��(j��)�����䱾�ط����(n��i)�����ژO�̵ĕr�g��(n��i)���W(w��ng)������Ӌ��C(j��)��CPU�������L���@����(sh��)��(j��)�����ڷ����(n��i)��ʹ�ú��ε��x����ʽ����CPU���f���ஔ(d��ng)�ژ�(bi��o)��(zh��n)��RAM�����ҷ����(n��i)��Ĕ�(sh��)��(j��)������ͨ�^Ӳ��������(sh��)�F(xi��n)�ģ���W(w��ng)�j(lu��)���t�H�Ƿ���Y(ji��)�c(di��n)��(sh��)n�����Î�������B%�ĺ���(sh��)����:τ=f(n��B%)[3]���W(w��ng)�j(lu��)���t���pС�����C�ˌ�(sh��)�r�ԡ�
3���댍(sh��)�����ϵ�y(t��ng)����
3.1���M�ɼ�����
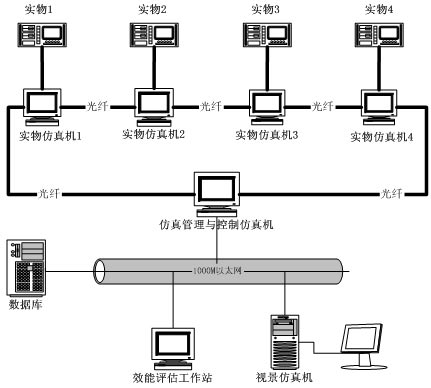
���D����ijͨ�Ō����댍(sh��)��ֲ�ʽ����ϵ�y(t��ng)Ӳ���Y(ji��)��(g��u)�D
ԓϵ�y(t��ng)�֞锵(sh��)�ַ���͌�(sh��)�r����ɲ��֡���(sh��)�ַ����ɷ�������c���Ʒ���C(j��)����(sh��)��(j��)�졢Ч���u������վ��ҕ������C(j��)ͨ�^1000M��̫�W(w��ng)�M�ɣ�ؓ(f��)؟(z��)��ɷ��攵(sh��)��(j��)�Ĵ惦���@ʾ��Ч���u�����ܡ���(sh��)�r�����ɷ�����������Ʒ���C(j��)�c���_��(sh��)�P��(sh��)�����C(j��)�M�ɣ�ؓ(f��)؟(z��)���ϵ�y(t��ng)�Č�(sh��)�r���湦�ܣ����У���(sh��)��ͨ�^�ӿ�̎�����c��(sh��)�����C(j��)���B��������C(j��)֮�gͨ�^�����(n��i)��W(w��ng)�M(j��n)�з���������慢��(sh��)����(sh��)�r���攵(sh��)��(j��)�Ă�ݔ��
3.2��ϵ�y(t��ng)��(sh��)�r���湤���^��
��(d��ng)��(sh��)�r�����_ʼ����������c���Ʒ���C(j��)����(j��)��ͬ�ķ����A�Σ���?q��)������C(j��)�l(f��)�Ͳ�ͬ�ķ��慢��(sh��)����ͨ�^�l(f��)����������Ʒ���C(j��)�M(j��n)�Ѕ���(sh��)���d����������(sh��)�����C(j��)�ڼ��d����(sh��)��ÿ��100ms���������c���Ʒ���C(j��)�l(f��)��һ�Ό�(sh��)��Č�(sh��)�r���攵(sh��)��(j��)�����ɷ�������c���Ʒ���C(j��)�ְl(f��)�o��(sh��)�ַ���ĸ���(ji��)�c(di��n)��
4�������(n��i)��W(w��ng)�f(xi��)�h�O(sh��)Ӌ����
����(j��)ϵ�y(t��ng)�Ĺ��ܼ���(sh��)�r���湤���^�̣������(n��i)��W(w��ng)�f(xi��)�h�ɷ֞�ɂ����֣�����ͨ�Ņf(xi��)�h�͌�(sh��)�r���攵(sh��)��(j��)��ݔ�f(xi��)�h��
4.1������ͨ�Ņf(xi��)�h
��Ҫ��ݔ��������c���Ʒ���C(j��)�ĸ������o��(sh��)�����C(j��)���Ԍ�(sh��)�F(xi��n)����ϵ�y(t��ng)�ĸ�헹��ܣ�������ʼ���������_ʼ/��ͣ/�֏�(f��)/ֹͣ������(sh��)���d���ɲ�ɔ_�ȡ�
����ͨ�ŷ֞�ɷN����һ�N�鎧����(sh��)����ͨ�ţ����l(f��)�ͷ��Ȍ�ԓ�������腢��(sh��)����RFM�������(sh��)�^(q��)��Ȼ��l(f��)��������շ��յ����������(y��ng)����(sh��)�^(q��)��@ȡ��(sh��)��(j��)����“�붨����(sh��)���d”������������(sh��)�^(q��)��������(zh��n)�붨����(sh��)���ٰl(f��)��ԓ������շ��յ�������붨����(sh��)�^(q��)�xȡ��(sh��)��(j��)���ڶ��N��o����(sh��)����ͨ�ţ�����������(sh��)ֱ�Ӱl(f��)�������“���敺ͣ/�֏�(f��)”���������ҪӑՓ����İl(f��)�ͺͽ����^�̡�
4.1.1 ͨ�������O(sh��)Ӌ
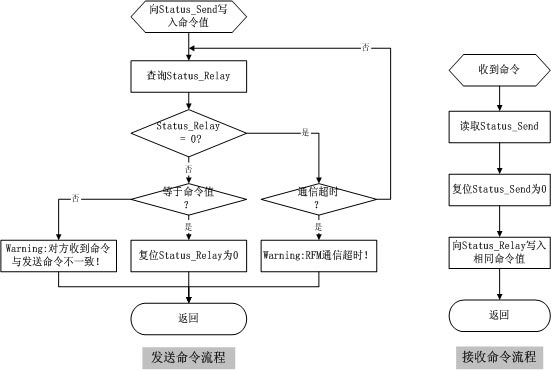
����ϵ�y(t��ng)�ķ��������Еr��Ҫ�B�m(x��)�l(f��)�ͣ����ԣ���횴_�J(r��n)���շ������_�յ�ԓ������ܰl(f��)����һ�l�������(j��)�@�N��r������1byte��8λ����ʾ������ͣ��������Ա�ʾ2×8 - 1 = 255�����������l(f��)�ͷ��O(sh��)��һ���l(f��)�͘�(bi��o)־λStatus_Send��1byte�����Ԍ������һ���؏�(f��)��(bi��o)־λStatus_Reply��1byte���Á��쿴���շ��Ļ؏�(f��)�����У������������RFM�ṩ��Poke����(sh��)����ԃ�������Peek����(sh��)���l(f��)������ͽ��������������D2��ʾ��
��
��������������������������������������������������������
�D�������������(n��i)��W(w��ng)����l(f��)�ͺͽ������̈D������
�l(f��)���������̣��l(f��)�ͷ���Status_Send��������ֵ���������ԃStatus_Reply����(d��ng)��ԃ��ͬ�ӵ�����ֵ�r����ʾ���շ��ѽ�(j��ng)���_�յ��l(f��)�ͷ������(d��ng)��ԃ���c�l(f��)�Ͳ�ͬ������ֵ�r����ʾ���շ�?j��ng)]�����_���յ������(d��ng)��ԃ�r�g����1s�r����ʾ���շ�?j��ng)]���յ����Ȼ��l(f��)�ͷ���(f��)λStatus_Reply��0��
�����������̣����շ��@֪�������Status_Send�xȡ����ֵ������ԓ����ֵ����Status_Reply��ͬ�r��(f��)λStatus_Send��0��
4.1.2 ��ݔ��ʽ
���շ��@֪�����ЃɷN��ʽ�����Дʽ�����l(f��)�ͷ���������ֵ�l(f��)���Д�SendEvent�����շ�푑�(y��ng)�Д�CallEvent����Status_Send�xȡ����ڲ�ԃ��ʽ�������շ����r��ԃStatus_Send����(d��ng)Status_Send����0��o�����B(t��i)��������0���������B(t��i)��
��ԃ��(bi��o)־�^(q��)Ҳ���ڃɷN��ʽ��whileѭ�h(hu��n)��ԃ��1ms��ý�w���r����ԃ��
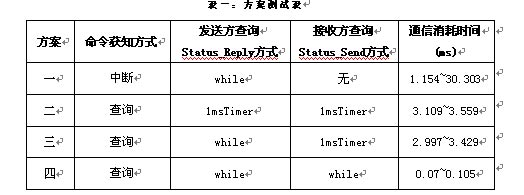
����(j��)��ݔ��ʽ�IJ�ͬ���҂��O(sh��)Ӌ��4�N������
��һ���l(f��)�ͷ�����(Poke)����ֵ���l(f��)���Д�SendEvent����while��ԃ(Peek) Status_Reply�����շ�푑�(y��ng)�Д�CallEvent��
�������l(f��)�ͷ�����(Poke)����ֵ����1msTimer��ԃStatus_Reply�����շ���1msTimer��ԃ(Peek)Status_Send��
�������l(f��)�ͷ�����(Poke)����ֵ����while��ԃStatus_Reply�����շ���1msTimer��ԃ(Peek)Status_Send��
���ģ��l(f��)�ͷ�����(Poke)����ֵ����while��ԃStatus_Reply�����շ���while��ԃ(Peek)Status_Send��
4�N���������ܜyԇ�Y(ji��)��Ҋ��1��
������������������
��
�yԇ�Y(ji��)��������
����(j��)��1���o���Ĝyԇ�Y(ji��)��������һ�Ćδ�ͨ�ŕr�g��̣���ƽ���r�g�^��ԭ���Ǯ�(d��ng)ϵ�y(t��ng)ͬ�r�M(j��n)�����������r��RFM�Д�푑�(y��ng)�ă�(y��u)�ȼ�������Windowsϵ�y(t��ng)�е��������(d��o)��ϵ�y(t��ng)��ԓ�Д�푑�(y��ng)̎���^�����ķ���ķ�(w��n)���Կ��]�����˲���ԓ�����������Ćδ�ͨ�ŕr�g��ƽ���r�g��鷀(w��n)�������yԇ�^���аl(f��)�F(xi��n)�����շ�����whileѭ�h(hu��n)��ʽ��ԃRFM����ʹ����(chu��ng)��һ����(d��)���ľ��́����ԓ���չ�����ռ�õ�ϵ�y(t��ng)�YԴҲ�Ǻܴ�ģ�ϵ�y(t��ng)���o���M(j��n)�������������Ñ�����푑�(y��ng)��������ϵ�y(t��ng)�YԴ���]�����˲���ԓ����������(j��)�������ͷ������ĕr�g���ȣ��˲����^�鷀(w��n)���ķ��������鱾ϵ�y(t��ng)������ͨ�Ņf(xi��)�h��
4.2 ��(sh��)��(j��)��ݔ�f(xi��)�h�O(sh��)Ӌ
��Ҫ��ݔ����(sh��)��Č�(sh��)�r���攵(sh��)��(j��)�o��������c���Ʒ���C(j��)��
�����������(sh��)���ʽ�M(j��n)�аl(f��)�ͣ���������攵(sh��)��(j��)��l(f��)������֪ͨ��������c���Ʒ���C(j��)���t��Ҫ3~4(ms)× 4(�_) = 12~16(ms)�ĕr�g��ɔ�(sh��)��(j��)�����^�̣�����ϵ�y(t��ng)Ҫ�����Ď�����С��10ms���o���_(d��)������ָ��(bi��o)��
����(j��)������C(j��)������(sh��)��(j��)����������c(di��n)������һ�N�ڷ����(n��i)�濨���O(sh��)�Ô�(sh��)��(j��)����^(q��)�ķ�������ͨ�^��׃ƫ�Ƶ�ַ��һ����(sh��)��(j��)�^(q��)���Ӟ����(N��)��ͬ�Ĕ�(sh��)��(j��)�^(q��)��ÿ����(sh��)��(j��)�^(q��)���O(sh��)��һ����(sh��)��(j��)��(bi��o)־λData_Flag_N����(d��ng)Data_Flag_ N��0�r����ʾԓ��(sh��)��(j��)�^(q��)��գ����]�Д�(sh��)��(j��)���Ա��xȡ����(d��ng)Data_Flag_ N��1�r����ʾԓ��(sh��)��(j��)�^(q��)�ь��꣬���Ա��xȡ�������_ʼ�l(f��)�ͷ��_��100ms���r�������Տ�1��N�������^(q��)���딵(sh��)��(j��)������λData_Flag_ N = 1�����շ��_��50ms���r��������ͬ�ӵ�����ԃData_Flag_ N����(d��ng)Data_Flag_ N = 1�r�xȡ��N������^(q��)�Ĕ�(sh��)��(j��)������(f��)λData_Flag_ N��0��
����ԓ�f(xi��)�h�p�����p��ͨ�����ֵď�(f��)�s�ȣ��������(n��i)�濨���x�������r�g�s��1ms����(sh��)�r���攵(sh��)��(j��)��ݔֻ��Ҫ1~2(ms)× 4(�_) = 4~8(ms)������ɣ���(j��ng)�^��(sh��)�(y��n)�yԇ���܉�M�㱾ϵ�y(t��ng)�Č�(sh��)�r��ָ��(bi��o)��
5�����Y(ji��)
���ĸ���(j��)ϵ�y(t��ng)�Ĺ������������ָ��(bi��o)���鷴���(n��i)��W(w��ng)�����һ�N���ò鿴����؏�(f��)������ͨ�Ņf(xi��)�h�Ͳ����xȡ��(sh��)��(j��)����^(q��)�Č�(sh��)�r��(sh��)��(j��)��ݔ�f(xi��)�h��ԓ�f(xi��)�h�������ˡ����ھ��̌�(sh��)�F(xi��n)��ͬ�r���кܺõĔU(ku��)չ�ԣ��ڱ�����ϵ�y(t��ng)���ѵõ��ܺõ��(y��n)�C��
�����īI(xi��n)
1 Milan Jovanovic and Veljko Milutinovic. An Overview of Reflective Memory Systems Concurrency, IEEE ��see also IEEE Parallel & Distributed Technology�� , 1999��7��2��: 56��64.
2 f��. �����(n��i)��W(w��ng)��(sh��)�rͨ�ż��g(sh��)���о�[J]. Ӌ��C(j��)���̣�2002����7����143��144.
3 ��(j��ng)ͮ�����Fɽ�����^��. ���ڸ��پW(w��ng)�j(lu��)�Y(ji��)��(g��u)��(sh��)�r��ݔ��ý�w��Ϣ. Ӌ��C(j��)�����c��(y��ng)�ã�1997; ��9��: 14��17.
4 �����A. ���÷����(n��i)��W(w��ng)�j(lu��)��(g��u)�ɷֲ�ʽ��(sh��)�r����h(hu��n)��[J]. Ӌ��C(j��)���棬1997; ��10��: 8��11.
5 ��־�������˳ɣ����܊.���ڌ�(sh��)�r�W(w��ng)�j(lu��)�ļ����ƌ�(d��o)�����댍(sh��)�����ϵ�y(t��ng)�O(sh��)Ӌ��J��. Ӌ��C(j��)���棬2003; ��5��: 20��21.
|

