����1. ����
�����C����ҕ�X�ŷ�ϵ�y�ǙC�����I���е���Ҫ�о�������Դ��80��������S��Ӌ��C���g���D��̎�����g��������Փ�İlչ��ȡ���˺ܴ��M������һЩϵ�y��Ͷ��ʹ�á�ҕ�X�ŷ���ͨ�����f�ęC��ҕ�X������ͬ��ҕ�X�ŷ������ÙC��ҕ�X��ԭ�����M�ЈD����Ԅӫ@ȡ��������ֱ�ӵõ��ĈD��̎��������Ϣ�У������M�ЈD��̎�����ڱM���̵ĕr�g�Ƚo��������̖�����əC���˵�λ���]�h���ƣ����F���C���˵Ŀ��ơ���������ϵ�y�Ԍ��Fij�N���ƞ�Ŀ�ģ�����ҕ�X�ŷ�ϵ�y�еĈD��̎���^�̱�횿��ٜʴ_��������Ҫᘌ��C����ҕ�X�ŷ�ϵ�yҪ����ٜʴ_�����c����M���Ŀ�о�����Ҫ��ӑՓ�о��˻���DSP�ĈD�����C����ҕ�X�ŷ����g��
����2 . ϵ�y����ԭ����Ӳ������
�������ڈD���ҕ�X�ŷ�ֱ��Ӌ��D���`��a��������̖����׃�Q���C�����\�ӿ��g���әCе�֣�����ŷ��΄ա�ԓ�������˶��`��Ϳ��gģ���`����С�
�������ڙC����ҕ�X�ŷ�ϵ�y,���r�Ԇ��}һֱ��һ���y�Խ�Q����Ҫ���}���D��ɼ��ٶ��^���Լ��D��̎����Ҫ�^�L�r�g���oϵ�y�������@�ĕr��;����ҕ�X��Ϣ������Ҳ���@������ϵ�y��Ӌ���������D��̎���ٶ���Ӱ�ҕ�X�ŷ�ϵ�y���r�Ե���Ҫƿ�i֮һ��
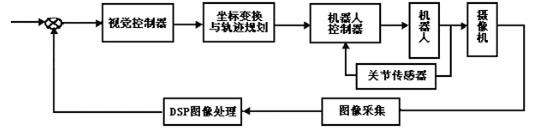
�������r�D��̎���OӋ���y�c����������ĕr�g����Ɍ������D����̎�������˵�ҕ�X��Փ������ֻ�ЈD��̎��ϵ�y��̎���ٶ��_ÿ��25�����ϕr�����_�����r��Ч������Ҫ�r�D��̎��ϵ�y�����40ms����Ɍ�һ��l�D����\��̎�������ܱ��C�D��Č��r�ԡ������_��ԓ̎���ٶȣ��҂������˻���DSP�ĈD��ҕ�X�ŷ���ʽ����Y����D1��ʾ��
�D1 ����DSP�ĈD�����C����ҕ�X�ŷ��Y���D
����2.1 WTC6201PA�庆��
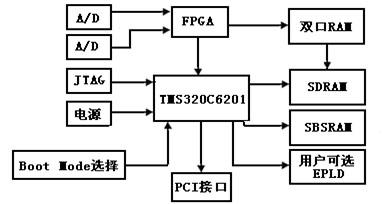
���������x����ͤ��˾��WTC6201PA�壬�����Ӳ���M����D2��ʾ������
�D2 WTC6201PA��Ӳ���M��
����WTC6201PA�����EVM���е�һ�N����������TI��˾��DSP����TMS320C6201оƬ��TMS320C6201оƬ����ߕr��l�ʞ�200MHZ��ÿ���r����������Ԉ���8�lָ��Ķ����F16000MIPS�Ķ��c�\��������������������Ҫ���c��
���������������Ĺ����Y���������ij���������������DMA����ʹ��ȡָ���x��������DMA�������Բ��С�
����������ˮ��̎����ʹ�ɂ��������ͬ�IJ��������دB���У�����˳�������ٶȡ�
�������и����ܵ��ⲿ�惦���Uչ�ӿ�EMIF������ֱ���cͬ��ͻ�l�o�B�惦��SBSRAM��ͬ���ӑB�惦��SDRAM�B�ӣ����ڴ����������ٴ惦;߀����ֱ�Ӯ����惦���ӿڣ����c�o�B�惦��SRAM��ֻ�x�惦��EPROM�B�ӣ�����С�����Ĕ����惦�ͳ���惦;оƬ�Ȳ����ɵ�64K����惦�������ó�CASHE������߳������Ч�ʡ�
����16λ���C���܉������CPU�Ĵ惦�^�Լ�����·�M��ͨ�š��Ҷ�ͨ��DMA���������ڛ]��CPU���c����r�����ӳ��惦���g�еĔ������ƣ��Ķ��p�pCPU�Ĺ�������
����ͬ�r���������˸���ͬ���惦��SBSRAM��128K��32Bit����SDRAM��4M��32bit������·A/D�D�Q������������FPGA�������ⲿI/O�ӿڣ�����߀�ṩ��һ��McBSP�ӿڣ�����5V TTL�ƽ�������Ñ��c�ⲿϵ�yͨ�š�WT6201PA��M��PCI Local Bus Revision 2.1 �f�h�����C���L��DSP�������YԴ���Ñ���ͨ�^���C���d����WTC6201PA���ṩ��Win98��NT�µ���ܛ����DSP�đ���ܛ����APIs���������@��Ӳ��ƽ�_�͵�ܛ���죬�Ñ����Ժ������M��ܛ���_�l��
����2.2 ϵ�yӲ�����F
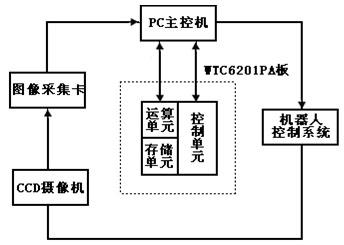
�����҂��x����WTC6201PA���ϵ�TMS320C6201оƬ��FPGA��SBSRAM��SDRAM���p��RAM��PCI������JTAG�ӿڵ�Ӳ���YԴ����ҕ�X�D��̎���Ԫ����PC���ؙC���D��ɼ�����CCD�z��C�͙C���˿���ϵ�y�M��ϵ�y��ԭ����D��D3��ʾ��
�D3 ϵ�yԭ����D
����ϵ�y�����^�����£�
����CCD�z��Cݔ���˜���ʽ��ȫ�ҕ��̖�����а������D����̖���ͺ�ͬ����̖���С������[��̖�����}�_��ǰ������}�_���߷N��̖����ϵ�y�����˱�����㹫˾��DH-PCI-H�D��ɼ����팍�Fҕ�l��̖���A̎����CCD�z��C��ҕ�l����ݔ�뵽�D��ɼ������D��ɼ��������O���Ĵ���λ�á���С�ͷ�ʽ�ɼ�ҕ�l�������ɼ��Ĕ����惦��Ӌ��C�ăȴ��С��D���ݔ�ɈD���Ƶģ��o��CPU���c���D���ݔ�ٶȿ��_40MB/S��
�����O�ÈD��ɼ����IJɼ���ʽ��25��/s�B�m�ɼ����t�ɼ�һ���ĕr�g��40ms��ÿһ���D������ż�Ɉ��M�ɣ����l��50HZ����һ������r�g��20ms���D��ɼ���С��512��512���أ�������8bit��256�Ҷȼ����tһ���D��Ĕ�������512��512��8bit=256KB���D���惦��ʽ����д�ţ����桢ż���ĈD�������ţ��M��һ�������D����
����C6201��BOOTMODE[4:0]�O��оƬ�����e��ʽ�����d�^�̲������C��HPI��������ʽ���ⲿ���Cͨ�^���C�ڳ�ʼ��CPU�Ĵ惦���g�����C������еij�ʼ�������C�ڿ��ƼĴ����е�DSPINTλ�O�Þ�1���Y�������^�̡�CPU�˳���λ��B���_ʼ���е�ַ0̎��ָ�
����ϵ�y��늺����C��HPI�ڌ�ϵ�y��ʼ������Ҫ��Ɍ����Ĵ������O�ã�����EMIF���ДࡢDMA�����P�ļĴ�����ʼ�������ȡ����C��HPI���ƼĴ�����DSPINTλ��1�|�lDSP�\�У�ϵ�y�M��ȴ���B��CCD�z��C���r�ɼ��D���D��ɼ���̎����惦�����C�ȴ档PC�C�ȴ澏�_�^һ����M����DSP�l�Д���̖��DSP�����ͨ�^PCI�������D�������C�ȴ潛HPI�ڂ�ݔ��WTC6201PA��Ƭ��SDRAM��DSP���Ʋ��T�����ȈD����DMA��ʽ��ݔ���Ȳ������惦��������DSP��ָ��Y��̎��оƬ�����пɾ����Ժá�����̎���������sָ��ɳ���RAM��ַ���g�Ĵ�С�Q�����ȃ��c��������FPGA������̎���ٶȱ��^��;��FPGA��ɾ���߉���������к��ļ����Ȳ���̎���Ͷ༉��ˮ��̎������������Ȳ�����߉�YԴʹ֮���m�ό��F���s߉�\�㡣����҂�����FPGA����f̎��������ɵӲ���������DSP��ɸߌӲ������ɷN�������Բ�����ˮ���ķ�ʽ�����\�У���ͬ��ɸ��وD��̎������FPGA��DSP֮�g�ĈD����ݔʹ���p�˿�RAM��̎����һ���D���DSP�����C�l��Ϣ�����C������D��̎���Y����PCI������ݔ��PC�C�ȴ棬PC�C�ٌ�λ��ƫ�����̖�����ŷ�����ϵ�y������ŷ��΄ա�
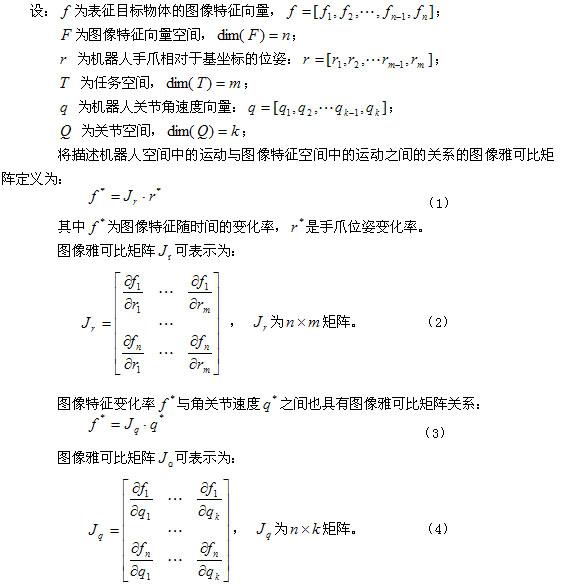
����3 �D���ſɱȾ��
�������ڈD�����C����ҕ�X�ŷ�ϵ�y���ƙC�����D���ſɱȾ���Ǻ��P�I�ģ��������˙C���˿��g�е��\���c�D���������g�е��\��֮�g���Pϵ������
����ʽ ��2������4���LjD���ſɱȾ�ꇵăɷN��ʾ��ʽ���ǻ��ڈD������ҕ�X��ۙ�о��Ļ��A����Ҫָ�����ǣ����˴_���õ�Ψһ�ĈD������ʸ�����D���������g�S����ԓ���ڻ����λ�˿��g�S����n�Rm����
����Ӌ��D���ſɱȾ�ꇵķ������ھ���Ӌ���������͌W���������ھ���Ӌ��ͨ�^�ӑB����õ��D���ſɱȾ��;������ͨ�^�˶������ģ��֪�R�õ��D���ſɱȾ��;�W��������Ҫ���������x��ʾ�̺��W�j�����õ��ſɱȾ�ꇡ�
�����YՓ
�������ķ����˙C����ҕ�X�ŷ�ϵ�y�Ļ���ԭ�������OӋ�˻���TMS320C6201�Ϳɾ���߉����FPGA�f̎���Y����ҕ�Xϵ�y�����F�ˈD��ɼ��͈D��Ŀ�˵Č��r̎�����ڌ�������҂��������OӋ��ҕ�Xϵ�y�����ˌ��ƽ�_��ͨ�^�����C�����OӋ��ҕ�Xϵ�y�M��C����ҕ�X�ŷ�ϵ�y�Č��rҪ��