|
���M(j��n)늙C(j��)�x�ͱ����в��օ���(sh��)��ҪӋ(j��)���(l��i)�õ������nj�(sh��)�HӋ(j��)�����S����r�҂����o(w��)���õ��_�еęC(j��)е����(sh��)����ˣ��@��ֻ�o�����^��(ji��n)�ε�Ӌ(j��)�㷽����
�� �(q��)��(d��ng)ģʽ���x��
�(q��)��(d��ng)ģʽ��ָ��Ό������b�õ��\(y��n)��(d��ng)�D(zhu��n)�Q�鲽�M(j��n)늙C(j��)�����D(zhu��n)��
�D��ʾ���(q��)��(d��ng)ģʽ������늙C(j��)�ļ�/�p�ٕr(sh��)�g���(q��)��(d��ng)�Ͷ�λ�r(sh��)�g��늙C(j��)���x�ͻ���ģʽ�D��
�� ��Ҫ�}�_��(sh��)��Ӌ(j��)��
��Ҫ�}�_��(sh��)��ָ?j��ng)��?d��ng)�b�Ì����w����ʼλ�Â��͵�Ŀ��(bi��o)λ������Ҫ�ṩ�o���M(j��n)늙C(j��)���}�_��(sh��)����Ҫ�}�_��(sh��)�����湫ʽӋ(j��)�㣺
|
��Ҫ�}�_��(sh��)��
|
���w�Ƅ�(d��ng)�ľ��x
���x늙C(j��)���D(zhu��n)һ���Ƅ�(d��ng)�ľ��x
|
��
|
360 o
���M(j��n)��
|
�� �(q��)��(d��ng)�}�_�ٶȵ�Ӌ(j��)��
�(q��)��(d��ng)�}�_�ٶ���ָ���O(sh��)���Ķ�λ�r(sh��)�g��늙C(j��)���D(zhu��n)�^(gu��)һ���Ƕ�����Ҫ���}�_��(sh��)��
�(q��)��(d��ng)�}�_��(sh��)���Ը���(j��)��Ҫ�}�_��(sh��)����λ�r(sh��)�g�ͼ�/�p�ٕr(sh��)�gӋ(j��)��ó���
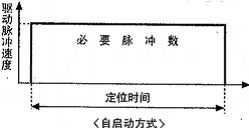
��1���Ԇ���(d��ng)�\(y��n)�з�ʽ
�Ԇ���(d��ng)�\(y��n)�з�ʽ��ָ���(q��)��(d��ng)늙C(j��)���D(zhu��n)��ֹͣ�r(sh��)����(j��ng)�^(gu��)���١��p���A�Σ���ֱ�����(q��)��(d��ng)�}�_�ٶȆ���(d��ng)��ֹͣ���\(y��n)�з�ʽ��
�Ԇ���(d��ng)�\(y��n)�з�ʽͨ�����D(zhu��n)���^�͵ĕr(sh��)��ʹ�á�ͬ�r(sh��)����?y��n)��چ��?d��ng)/ֹͣ�r(sh��)����һ��(g��)ͻȻ���ٶ�׃���������@�N��ʽ��Ҫ�^��ļ�/�p�����ء�
�Ԇ���(d��ng)�\(y��n)�з�ʽ���(q��)��(d��ng)�}�_�ٶ�Ӌ(j��)�㷽�����£�
|
�(q��)��(d��ng)�}�_�ٶ�[Hz]=
|
��Ҫ�}�_��(sh��)[�}�_]
��λ�r(sh��)�g[��]
|
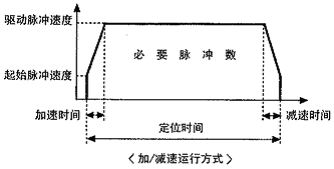
��2����/�p���\(y��n)�з�ʽ
��//�p���\(y��n)�з�ʽ��ָ늙C(j��)������һ��(g��)�^�͵��ٶȆ���(d��ng)����(j��ng)�^(gu��)һ��(g��)�����^(gu��)�̺��_(d��)���������(q��)��(d��ng)�}�_�ٶȣ��\(y��n)��һ�Εr(sh��)�g֮���ٽ�(j��ng)�^(gu��)һ��(g��)�p���^(gu��)�̺�늙C(j��)ֹͣ���\(y��n)�з�ʽ���䶨λ�r(sh��)�g�������ٕr(sh��)�g���p�ٕr(sh��)�g�����(q��)��(d��ng)�}�_�ٶ��\(y��n)�еĕr(sh��)�g��
��/�p�ٕr(sh��)�g��Ҫ����(j��)���;��x���ٶȺͶ�λ�r(sh��)�g��(l��i)Ӌ(j��)�㡣�ڼ�/�p���\(y��n)�з�ʽ�У���?y��n)��ٶ�׃���^С��������Ҫ������Ҫ���Ԇ���(d��ng)��ʽ�µ�����С����/�p���\(y��n)�з�ʽ�µ��(q��)��(d��ng)�}�_�ٶ�Ӌ(j��)�㷽�����£�
|
�(q��)��(d��ng)�}�_�ٶ�[Hz]=
|
��Ҫ�}�_��(sh��)������(d��ng)�}�_��(sh��)[Hz]����/�p�ٕr(sh��)�g[��]
��λ�r(sh��)�g[��]����/�p�ٕr(sh��)�g[��]
|
�� 늙C(j��)���صĺ�(ji��n)��Ӌ(j��)��ʾ��
��Ҫ��늙C(j��)���أ���ؓ(f��)�d����+��/�p�����أ�����ȫϵ��(sh��)
�� ؓ(f��)�d���ص�Ӌ(j��)�㣨TL��
ؓ(f��)�d������ָ?j��ng)����b�����cؓ(f��)�d���|�������ܵ���Ħ�����ء����M(j��n)늙C(j��)�(q��)��(d��ng)�^(gu��)����ʼ�K��Ҫ�����ء�ؓ(f��)�d���ظ���(j��)����(d��ng)�b�ú����w�������IJ�ͬ����ͬ���S����r���҂��o(w��)���õ����_��ϵ�y(t��ng)����(sh��)����������ֻ�o���˺�(ji��n)�ε�Ӌ(j��)�㷽����
ؓ(f��)�d���ؿ��Ը���(j��)����ĈD����ʽ��(l��i)Ӌ(j��)�㡣
��1���L�S�z�U�(q��)��(d��ng)
 �� ؓ(f��)�d���ص�Ӌ(j��)�㹫ʽ��
|
TL��[
|
F��PB
2�Ц�
|
+
|
��0F0PB
2��
|
]��
|
1
i
|
[kgf��cm]
|
�� ؓ(f��)�d���صĹ��㹫ʽ��
|
TL��
|
m��PB
2�Ц�
|
��
|
1
i
|
[kgf��cm] ��ˮƽ����
|
|
TL��
|
m��PB
2�Ц�
|
��
|
1
i
|
�� 2 [kgf��cm] ����ֱ����
|
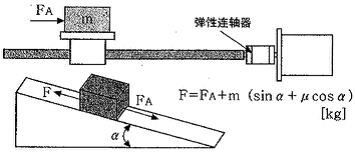
��2�����͎�/�X�l�X݆����(d��ng)
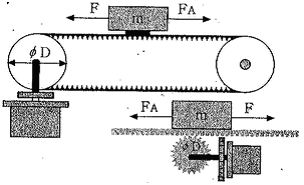
�� ؓ(f��)�d���ص�Ӌ(j��)�㹫ʽ��
|
TL��
|
F
2�Ц�
|
��
|
��D
i
|
��
|
FD
2��i
|
[kgf��cm]
|
F �� FA + m ( sin�� + ��cos��) [Kg]
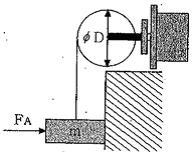
�� ؓ(f��)�d���صĹ��㹫ʽ��
|
TL��
|
D
2
|
�� m ��
|
1
��
|
��
|
1
i
|
[kgf��cm] ��ˮƽ����
|
|
TL��
|
D
2
|
�� m ��
|
1
��
|
��
|
1
i
|
�� 2 [kgf��cm] ����ֱ����
|
��3��Ƥ��݆����(d��ng)
�� ؓ(f��)�d���ص�Ӌ(j��)�㹫ʽ��
|
TL��
|
��FA+m
2��
|
��
|
��D
i
|
��
|
(��FA+m) D
2i
|
[kgf��cm]
|
�� ؓ(f��)�d���صĹ��㹫ʽ��
|
TL��
|
D
2
|
�� mg ��
|
1
i
|
[kgf��cm]
|
��4����(sh��)�y(c��)����
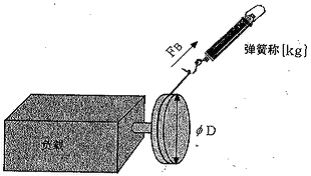
�҂�Ҳ����ͨ�^(gu��)�@�N�����õ�ؓ(f��)�d���أ��Ï��ɳ�����(d��ng)��݆�����D(zhu��n)��(d��ng)���˕r(sh��)���ɳӕ�(hu��)��һ��(g��)�x��(sh��)���@��(g��)��(sh��)ֵ�����������Ĵ�С��FB����Ȼ����Ի�݆�İ돽�Ϳ��Եõ�ؓ(f��)�d���أ�����ʽ����ͨ���@�N�����õ���(sh��)ֵҪ��Ӌ(j��)��õ��ýY(ji��)��Ҫ���_��
[����(sh��)�f(shu��)��]
|
F���S����ؓ(f��)�d [Kg]
|
F0���A(y��)ؓ(f��)�d [Kg] (��1/3F)
|
�ǣ�Ч�� (0.85��0.95)
|
|
FA���A(y��)ؓ(f��)�d [ ]
|
i���p�ٱ�
|
�̣�����(d��ng)��Ħ��ϵ��(sh��)
|
|
��0���A(y��)����ñ��(n��i)��Ħ��ϵ��(sh��) (0.1��0.3)
|
PB���L�S�z�U�ݾ� (cm/rev)
|
FB�����S�_(k��i)ʼ�\(y��n)�D(zhu��n)�r(sh��)���� [Kg]
|
|
D����ֱ݆��
|
m������������_(t��i)�Ŀ����� [Kg]
|
�����Aб�Ƕ�
|
�� ��/�p�����ص�Ӌ(j��)�� ��Ta��
��/�p���������Á�(l��i)���ٻ�p���c늙C(j��)���B�Ă���(d��ng)�b�á�����(j��)��/�p�ٕr(sh��)�g�͂���(d��ng)�b��ؓ(f��)�d�T�ԑT���IJ�ͬ���@��(g��)���ؕ�(hu��)�кܴ��׃������ˣ��Ԇ���(d��ng)�\(y��n)�з�ʽ�ͼ�/�p���\(y��n)�з�ʽ�����ؕ�(hu��)��һ��(g��)�^��IJ�ͬ����/�p�����ؿ�����ʽӋ(j��)�㣺
�� �Ԇ���(d��ng)�\(y��n)�з�ʽ����Ҫ�^��ļ�/�p�����أ�
��/�p������[kgf��cm]
|
��
|
�D(zhu��n)�ӑT�ԑT��[kgm2]+ؓ(f��)�d�T�ԑT��[kgm2]
�������ٶ�[cm/sec2]
|
��
|
�С����M(j��n)��[o]���(q��)��(d��ng)�}�_�ٶ�2[Hz]
180��3.6/���M(j��n)��[o]
| �� ��/�p���\(y��n)�з�ʽ
��/�p������[kgf��cm]
|
��
|
�D(zhu��n)�ӑT�ԑT��[kgm2]+ؓ(f��)�d�T�ԑT��[kgm2]
�������ٶ�[cm/sec2]
|
��
|
�����M(j��n)��[o]
180 o
|
|
��
|
�\(y��n)���}�_�ٶ�[Hz]������(d��ng)�}�_�ٶ�[Hz]
��/�p�ٕr(sh��)�g[sec] |
|