|
�����S���ƌW���g�Ŀ��ٰlչ����C�һ�w�����g���\��������C�һ�w�����g�ǙCе���g����늼��g����Ӽ��g�Լ�Ӌ��C���g��Ⱥ�w���g�ľC���\�á���C�һ�w�����g�漰�Cе���졢��ͨ����늡��x���x�����t������ߊʘ��ȱ����ИI���ڹ��I�ͽ����lչ��������Ҫ�ĵ�λ����Ϣ��������g�������²��ϡ�����Դ�ȸ߿Ƽ��I�����b�����Ϣ�����F���������y�a�I�ĸ��춼�x���_��C�һ�w�����g�İlչ��
������C�һ�w�����g�lչѸ�٣����и�헼��g����ԭ���ļ��g�wϵ���x�����������^����ϵ�y��ɫ�������������о��͑����I���S����Ӽ��g��ϵ�y���g�İlչ����C�һ�w�����g�đ����c�lչ�M����һ��ȫ�µ��A�Ρ��C늮aƷ��C늮aƷ�ɞ��늡��t�����ġ���ߵȮa�I����Ҫ�aƷ����C�һ�w�����g���ڹ��I�O����졢��������b�侫�Ⱥ�Ч��������Ҫ�����ã���C�һ�w�����g�ں��պ��졢���������ܙC�������Ƶ��F���ҾC�ό����Ŀ����I���и��ǵ�λͻ����
��������C�һ�w��ϵ�y���ÙC����һ��������C�һ�w��ϵ�y���ÙC�����OӋ��Փ���������ɡ��C�����c���P�I���g�����Ͱ����͑������Եȣ����У����Ԕ��ؙC�����ӹ����ġ������˜y���x�������@�R�����I�C���ˡ������ӡ�C�Ƚ����C�һ�w���aƷ�ij��ÙC��������ϵ�y��B���@Щ�aƷ�����C���ĽM�����Ժ͑������c�����Լ����и�C����늽����x��܇݆���Ď�ʽ�C���ˡ������C���ˡ�CT����C����P���������d��C�һ�w���b�õČ��ÙC��������Ԕ���������@Щ�b�������C���ĽM�����Ժ͑������c����չʾ�˹�C�һ�w��ϵ�y���ÙC�����¼��g���³ɹ���
����1. �Π��׃�Ď��C����
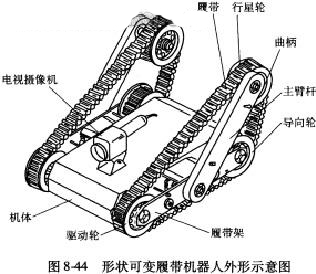
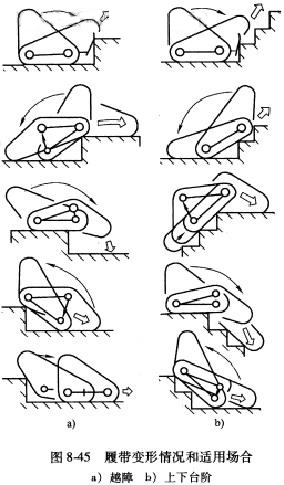
�������^�Π��׃�Ď��C���ˣ���ָԓ�C���������Ď��Ę��ο��Ը������Ηl�������IҪ���M���m��׃�����D8-44��ʾ��һ�N�Π��׃�Ď��C���˵�����ʾ��D��ԓ�C���˵����w�����ǃɗl�Π��׃���Ď����քe�Ƀɂ���늄әC�ӡ����ɗl�Ď����ٶ���ͬ�r���C���ˌ��Fǰ�M������Ƅӣ����ɗl�Ď����ٶȲ�ͬ�r���C���ˌ��F�D���\�ӡ������ۗU�@�Ď����ϵ��S���D�r����������݆�D�ӣ��Ķ����F�Ď��IJ�ͬ���Σ����m����ͬ���\�Ӻ����I�h����Ҋ�D8-45����
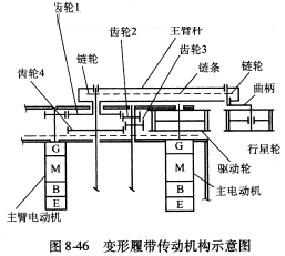
�����D8-46��ʾ��׃���Ď����әC��ʾ��D����늄әC������݆�\�ӣ�ʹ�Ď��D�ӡ�����늄әCͨ�^�c늄әCͬ�S��С�X݆�c�X݆1���ϣ�һ���控�����ۗU�D�ӣ���һ����ͨ�^�X݆2���X݆3���X݆4�ć��ϣ������݆���D���݆ͨ�^朗l�Mһ��ʹ���b����݆���������D������X݆1��4���X݆2��3���X���քe��ͬ������X݆1���X݆4���D��һ�£��������෴������朗l�ɶ˵��݆�X����ȣ�ʹ������늄әC�����r�����ۗU�D�^�ĽǶ��c�����Ľ^���D�Ǵ�С��ȡ������෴��
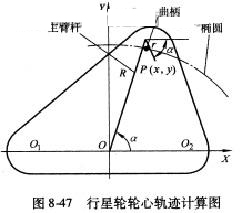
�����D8-47������݆݆��܉�EӋ��D���ɈD���Ԍ���ԓ����݆݆��P�c���\��܉�E�M����ʽ��
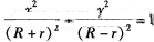
(84)
�����@Ȼ��ʽ(8-4)��һ���˜ʙE�A���̣��@�f��ԓ�C���˵��Ď����κ��Π�r���ܱ����ɾo�̶Ȳ��l��׃����
����2. λ�ÿ�׃�Ď��C����
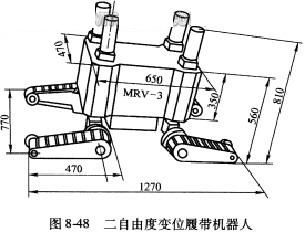
�������^λ�ÿ�׃�Ď��C���ˣ���ָ�Ď�������܇�w��λ�ÿ��l��׃�����Ď�ʽ�C���ˡ��@�Nλ�õĸ�׃�ȿ�����һ�����ɶȵģ�Ҳ�����ǃɂ����ɶȵġ��D8-48��ʾ��һ�N�����ɶ�׃λ�Ď��C���ˣ����Ď��܉��@܇�w��ˮƽ�S���ʹ�ֱ�S��ƫ�D���Ķ���׃�C���˵����w���Ρ�
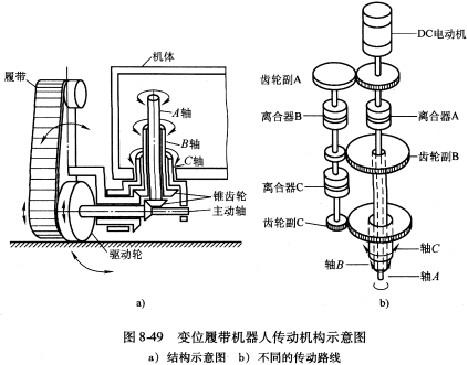
�����D8-49������׃λ�Ď��C���˂��әC��ʾ��D���ɈD8-49a��֪����A�S�D�ӕr��ͨ�^һ���F�X݆�ć��ϣ����\�ӂ��f�o��݆���Ķ������Ď��\�ӣ���B�S�D�ӕr��ͨ�^��һ���F�X݆�ć��ϣ������c�Ď������B��������ʹ�Ď��@�����S�S�����D׃λ����C�S���ӕr���Ď��Bͬ�䰲�b��һ���@C�S��������܇�w�D�ӣ���׃��λ�á�A��B��C���S��һ�_늄әC���ӣ�ͨ�^�ГQA��B��C�����x������ʹ֮���F��ͬ�Ă���·�������w��r��Ҋ�D8-49b��
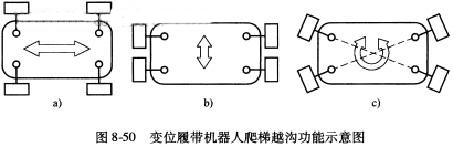
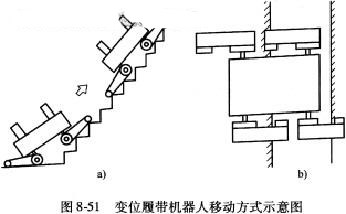
����׃λ�Ď��C���˼��Ď�ʽ�C���˺�ȫ��λ݆ʽ�C���˵ă��c��һ���������Ď���һ�����ɶȷ���׃λ�r�������������A�ݺͿ�Խ������Ҋ�D8-50���������Ď�����һ�����ɶȷ���׃λ�r���Ɍ��F܇�w��ȫ��λ���߷�ʽ��Ҋ�D8-51����
|

