|
����ֱ�����˙C���˸��
�������I�����У��܉F�Ԅӿ��Ƶġ����؏;��̵ġ���ܵġ������ɶȵġ��\�����ɶȽ��ɿ��gֱ���Pϵ������;�IJ����C�����܉���\���w���������ߣ�����ɸ��N���I���P�ڙC���˵Ķ��x�S���Ƽ��IJ���lչ���ڲ�������ƣ�ֱ�����˙C��������C���˵�һ�N���京�xҲ�ڲ���������С�
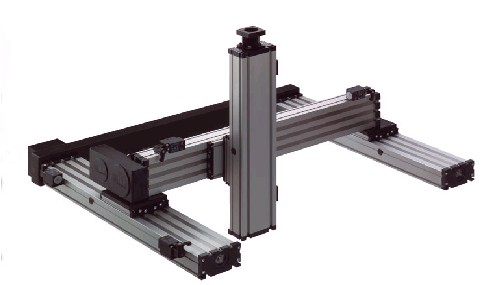
����ֱ�����˙C���ˈDһ
����ֱ�����˙C���˵����c��
����1�����ɶ��\�ӣ�ÿ���\�����ɶ�֮�g�Ŀ��g�A�Ǟ�ֱ�ǣ�
����2���Ԅӿ��Ƶģ����؏;��̣����е��\�Ӿ��������\�У�
����3��һ���ɿ���ϵ�y����ϵ�y���Cеϵ�y���������ߵȽM�ɡ�
����4���`���ܣ���������ߵIJ�ͬ����Ҳ��ͬ��
����5���߿ɿ��ԡ����ٶȡ��߾��ȡ�
����6�������ڐ��ӵĭh�������L�ڹ��������ڲ����S�ޡ�
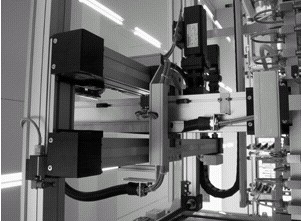
����ֱ�����˙C���˵đ��ã�
������ĩ�˲������ߵIJ�ͬ��ֱ�����˙C���˿��Էdz�������������N�Ԅӻ��O�䣬����纸�ӡ����\�������ϡ����b���a�⡢��⡢�z�y��̽��������b�䡢�N�ˡ����a����a����ܛ���ͣ���Ϳ��Ŀ�˸��S���ű���һϵ�й������e�m���ڶ�Ʒ�N�������������Ի����I�����ڷ�����߮aƷ�|������߄ڄ����a�ʣ����Ƅڄӗl���ͮaƷ�Ŀ��ٸ��Q������ʮ����Ҫ�����á�
ֱ�����˙C���˵đ��ÈD��
�����S��ֱ�����˙C���˵đ���Խ��Խ�V����ֱ�����˙C���˵��OӋ���������@����Ҫ���ɹ����OӋһ�_ֱ�����˙C�����漰���ܶ��Ĺ����������Cе�Y���������ӡ��ŷ����Ƶȵȡ���������Ԅӻ����Ƽ��g����˾��������ֱ�����˙C���˼��g���á����ؼ��g�ͮaƷ�аl���҂����е�BAHR��˾ֱ����λϵ�y�Լ��Cе�ֱ��_�l���˃r�ȃ�����ϵ�Д���ֱ�����˙C���ˣ����V���ؑ�������܇����ӡ�������z�y���t�������졢ʳƷ�ȸ����I������a���ϡ�
���������҂��͌�ֱ�����˙C���˵��OӋ�M��һ����Ҫ���U����
����һ���C�����OӋ���c��
����1���C���˵��OӋ��һ�����s�Ĺ������������ܴ��漰��֪�R��ܶ࣬������Ҫ������ɡ�
����2���C�����OӋ������͑����OӋ�������]�T��܇���OӋ����Ҫ�������Ñ���һ�𣬲�ͣ�����Ñ�Ҫ�����Q������
����3���C�����OӋ������ӹ����OӋ���ٺõ��OӋ��������S���ܼӹ����aƷ���OӋҲ��ʧ���ģ��OӋ����Ҫ���մ����ļӹ���ˇ���ӹ��ֶΡ�
����4���C�����OӋ��һ���������Ƶ��^�̡�
���������C�����OӋ���̣�
����1��ʹ��Ҫ��ķ�����ÿһ���C���˶��Ǹ����ض���Ҫ��Įa�����OӋ�ģ��OӋ�ĵ�һ������Ҫ��ʹ��Ҫ�����������_���OӋ�r��Ҫ���]�ą�����������
�����C���˵Ķ�λ���ȣ��؏Ͷ�λ���ȣ�
�����C���˵�ؓ�d��С��ؓ�d���ԣ�
�����C�����\�ӵ����ɶȔ�����ÿ���ɶȵ��\���г̣�
�����C���˵Ĺ������ڻ��\���ٶȣ��Ӝp�����ԣ�
�����C���˵��\��܉�E���������P��
�����C���˵Ĺ����h�������b��ʽ��
�����C���˵��\�й����ơ��\�Љ�����
������������Ҫ��
����2�� ���Cеģ�ͳ������C���ˏęCе�Y���ִ��w�ɷ֞����T�Y�����ڒ�Y��������Y�����������b��
�����g��Ҫ���x��ͬ�ĽY����ÿ�N�Y�������W���ԡ��\�����Զ��Dz�һ�ӵġ����m���OӋ����ǻ���һ���_���ĽY����
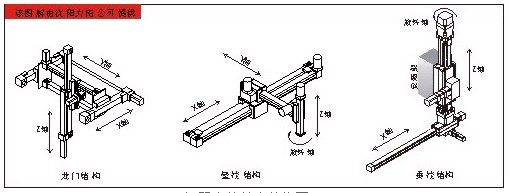
�C���˵Ļ����Y���D��
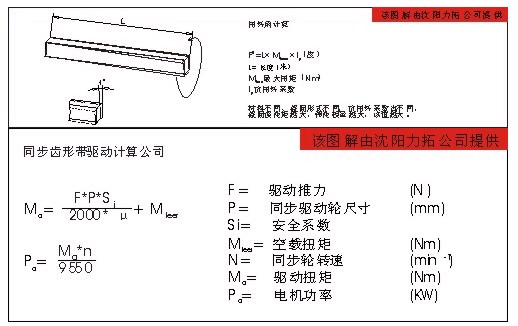
����3���\������Ӌ�㣺���Pԓ���ܵą����У�
�����ٶ�������
����ƽ���ٶȣ�V=S/t
��������ٶȣ�Vmax=at
�������ٶ�/�p�ٶȣ�a=F/m
�������У�S���\���г�
����t�鶨λ�\�ӕr�g
����F���ٕr������
����M�\�����w�|����
����4�����W���Է���
����һ���C���������S�ඨλ��Ԫ�M�ɵģ�ÿ����λϵ�y��Ҫ��������Ҫ�������Ŀ���£�
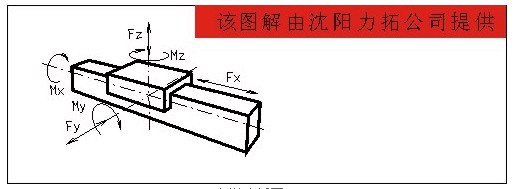
���W�����D��
����ˮƽ����Fx ������Fz
�����ȉ���Fy
����Mx��My��Mz
����5���Cе����У�ˣ�
����ÿ����λ��Ԫ��ÿ������Ҫ�M��У�ˣ������p��֧�����͑ұ�����
����1�� �϶�׃��Ӌ��
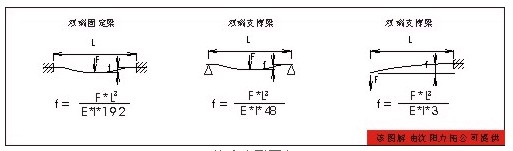
�϶�׃�ΈD��
����F��ؓ�d��N����
����L����λ��Ԫ�L�ȣ�mm����
����E�����Ϗ���ģ����
����I�����Ͻ���T�Ծ�(mm4)��
����f���϶���׃��mm��
����ע�⣺��Ӌ��϶���׃�r���������خa����׃�β��ܺ�ҕ���������ذ������d��Ӌ�㡣
���� ���Ϲ�ʽӋ������o�B��׃�����H�����У����C����һֱ̎���\�Ӡ�B�����Ӌ��������a������׃����׃ֱ��Ӱ푙C���˵��\�о��ȡ�
����2��Ť�D��׃Ӌ�㣺
������һ������һ�˹̶�����һ��ʩ��һ���@�SŤ�غ��a��Ť��׃�Ρ����H�����Юa��ԓ��׃��ԭ��һ����ؓ�dƫ�Ļ����@�S�������D�����w���ڡ�
Ť�D���ط����D�ߡ���
����6����Ԫ���x��
�������õ���ϵ�y�У�����/֧���ŷ�늙C��ϵ�y�����M늙C��ϵ�y��ֱ���ŷ�늙C/ֱ�����M늙C��ϵ�y��
����ÿһ����ϵ�y����늙C�������ɲ��ֽM�ɡ������������nj������̖�Ŵ�����d����늙C�ď���ϣ���늙C��늙C�t�nj����̖�D���ɾ��_���ٶȼ���λ�ơ�
������ҪӋ����Ŀ���£�
����늙C���ʣ�
����늙CŤ�أ�
����늙C�D�٣�
�����p�ٙC�p�ٱ�
����늙C�T��/ؓ�d�T����ƥ���Pϵ
��������Ӌ�㹫ʽ��Ӌ�㷽��Ո�c������ع�˾ϵ��
����7���Cе�Y���OӋ
�����������ǰ����헹�����һ��ֱ�����˙C���˶�λϵ�y���r�ξ��ѽ����OӋ�ߵ��^�X���γ��ˣ������Ĺ������nj��r�ή��ɹ��̈D���Ա����a���҂����h�Ñ������Sܛ���OӋ���Ա�z���Ƿ����λ�ø��档
�����C���˵��\��܉�E���в��_���ԣ��`���׃��������һ��λ�ò�����λ�ø��棬������һ��λ�þ����ˡ�
����8���O�������
�����Cе�Y���OӋ��ɺ�Ҫ�����_�O���M�Љ���Ӌ�㣬����Ԫ���ĉ�����ҪӋ�㣬��C����܉���ĉ������p�ٙC�ĉ������ŷ�늙C�ĉ����ȡ�
�����C���˵��\�Љ����c�\���ٶȡ�ؓ�d��С���Y����ʽ�������h���������Ƶ����P��
��������l�F�C���˵��\�Љ���̫�̣���Ҫ�����{���OӋ��
�������wӋ�㷽��Ո�c������ع�˾ϵ��
����9������ϵ�y���x��
�����]�п���ϵ�y�ęC���˾����˛]�д��Xһ�ӣ����܈����κ΄����������҂�ͨ�����]��������ϵ�y�ęCе�Y���Q����C��C���˶�λϵ�y��robot positioning system����
��������Ҫ��IJ�ͬ������ϵ�y���x��Ҳ��ͬ��ͨ���x���������ϵ�y�ĮaƷ�У�
����PLC �����������
�������I�\�ӿ��ƿ���motion card��;
�������ֿ���ϵ�y(CNC)
�������ڿ�����
����10������
��������ϵ�y�ǙC���˵Ĵ��X�������ǙC���˵�˼�롣����ľ���ֱ�ӷ����OӋ�ߵ�˼�롢��D���\������
��������������һ�����s���^�̣���ֻҪ�C���˿��w�OӋ�]�І��}�������������ġ�������Ҫע�������}��
�������΄յķ���Ҫ���������̌Ӵ�Ҫ������߉������
�����Y���Z��
�����C���˵��OӋ��һ��������Ϥ���������Ƶ��^�̣���Ҫ�����ڌ��H�����п��Y��ߡ��������s���������ࡣ����ֻ������Щ���εĽ�B�����dȤ���ѿ��c�҂�ϵ��lt.sy@126.com������ȡԔ�����OӋ�Y�ϡ�
|

