
大幅提升物體抓取與放置精度!新型視覺(jué)系統(tǒng)賦能工業(yè)機(jī)器人
http://www.kblhh.cn 2025-02-19 10:19 來(lái)源:中國(guó)機(jī)器人網(wǎng)
近日,一項(xiàng)發(fā)表于IEEE的研究成果引發(fā)機(jī)器人領(lǐng)域廣泛關(guān)注。來(lái)自越南河內(nèi)工業(yè)大學(xué)、中國(guó)臺(tái)灣科技大學(xué)、日本芝浦工業(yè)大學(xué)等機(jī)構(gòu)的科研團(tuán)隊(duì),成功研發(fā)出一種基于手眼相機(jī)的工業(yè)機(jī)器人視覺(jué)抓取與放置控制系統(tǒng),為工業(yè)機(jī)器人智能化升級(jí)提供了關(guān)鍵技術(shù)支撐。
在工業(yè)生產(chǎn)中,機(jī)器人與視覺(jué)系統(tǒng)的融合至關(guān)重要,但現(xiàn)有方案存在諸多難題。此前不少研究局限于模擬環(huán)境,在實(shí)際應(yīng)用時(shí),機(jī)器人與相機(jī)坐標(biāo)系對(duì)齊困難,數(shù)據(jù)準(zhǔn)確性也難以保證。并且,使用工業(yè)相機(jī)成本高昂,基于2D相機(jī)的研究又常面臨實(shí)時(shí)坐標(biāo)系同步等挑戰(zhàn)。針對(duì)這些問(wèn)題,該研究提出創(chuàng)新解決方案。
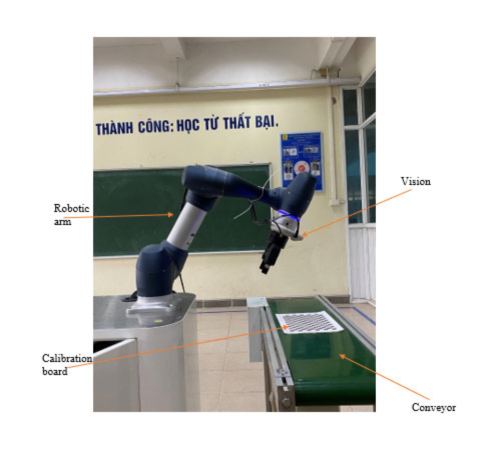
研究團(tuán)隊(duì)采用低成本2D相機(jī),將其安裝在機(jī)器人手臂末端,并結(jié)合深度學(xué)習(xí)算法。系統(tǒng)核心是融合YOLOv7深度學(xué)習(xí)網(wǎng)絡(luò)與GAN(生成對(duì)抗網(wǎng)絡(luò))。YOLOv7以其快速推理和高準(zhǔn)確率優(yōu)勢(shì),成為物體檢測(cè)的基礎(chǔ)框架,能夠快速識(shí)別出機(jī)器人工作空間內(nèi)的物體。GAN則用于生成更逼真、多樣的數(shù)據(jù),輔助訓(xùn)練圖像分類算法,即便在真實(shí)數(shù)據(jù)有限的情況下,也能有效提升物體檢測(cè)精度。
為實(shí)現(xiàn)相機(jī)與機(jī)器人坐標(biāo)系的精準(zhǔn)同步,研究人員利用方格棋盤(pán)圖案進(jìn)行校準(zhǔn)。通過(guò)特定算法計(jì)算,得出相機(jī)的內(nèi)參和外參,將相機(jī)獲取的物體坐標(biāo)準(zhǔn)確轉(zhuǎn)換為機(jī)器人坐標(biāo)系下的坐標(biāo),保障機(jī)器人精確抓取和放置物體。
在機(jī)器人運(yùn)動(dòng)控制方面,研究針對(duì)6自由度協(xié)作機(jī)器人的復(fù)雜運(yùn)動(dòng)學(xué)問(wèn)題,運(yùn)用矩陣變換法計(jì)算機(jī)器人的正向和逆向運(yùn)動(dòng)學(xué)參數(shù)。通過(guò)數(shù)值逆運(yùn)動(dòng)學(xué)求解器和雅可比線性化方法,實(shí)現(xiàn)機(jī)器人在笛卡爾空間的平滑運(yùn)動(dòng)控制,確保機(jī)器人準(zhǔn)確到達(dá)目標(biāo)位置,穩(wěn)定抓取和放置物體。
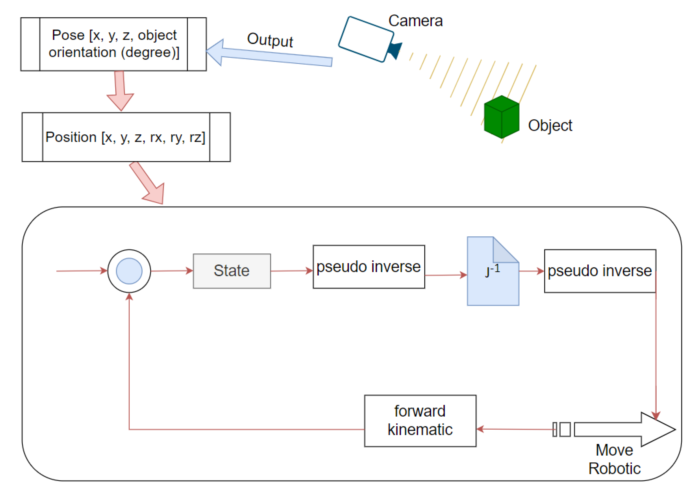
求解逆運(yùn)動(dòng)學(xué)過(guò)程的數(shù)值方法
科研團(tuán)隊(duì)對(duì)該系統(tǒng)進(jìn)行了全面測(cè)試。在仿真實(shí)驗(yàn)中,利用RoboDK軟件模擬機(jī)器人工作場(chǎng)景,結(jié)果顯示其在不同姿態(tài)下均能精準(zhǔn)定位目標(biāo),且正向和逆向運(yùn)動(dòng)學(xué)計(jì)算精度與以往研究相近,但仿真過(guò)程更簡(jiǎn)便高效。

RoboDK在仿真中的應(yīng)用
在實(shí)際實(shí)驗(yàn)里,使用3種不同物體進(jìn)行測(cè)試,經(jīng)200輪訓(xùn)練,系統(tǒng)物體檢測(cè)精度超94%。機(jī)器人可按預(yù)設(shè)流程,準(zhǔn)確抓取和放置物體,每小時(shí)能處理220 - 250個(gè)產(chǎn)品,展現(xiàn)出強(qiáng)大的實(shí)用價(jià)值。

機(jī)械臂拾取和放置物體
該研究成果意義重大,為工業(yè)機(jī)器人發(fā)展開(kāi)辟新方向。低成本2D相機(jī)的使用,大幅降低系統(tǒng)成本,同時(shí)保證高精度操作;YOLOv7與GAN的融合,提高物體識(shí)別的準(zhǔn)確性和適應(yīng)性;棋盤(pán)格校準(zhǔn)方法實(shí)現(xiàn)相機(jī)與機(jī)器人坐標(biāo)系的實(shí)時(shí)同步;系統(tǒng)在仿真和實(shí)際環(huán)境中的良好表現(xiàn),驗(yàn)證了其可行性和有效性。未來(lái),研究團(tuán)隊(duì)計(jì)劃探索YOLOv8、YOLOv10等算法在系統(tǒng)中的應(yīng)用,并嘗試在更先進(jìn)的3D設(shè)備上進(jìn)行測(cè)試,致力于打造更靈活、高效的機(jī)器人控制系統(tǒng),推動(dòng)工業(yè)自動(dòng)化發(fā)展。
相關(guān)新聞
- ? 美的藍(lán)橙實(shí)驗(yàn)室重載機(jī)器人研發(fā)成果獲關(guān)注
- ? 寶馬:首次將物理人工智能引入歐洲,萊比錫工廠啟動(dòng)人形機(jī)器人試點(diǎn)
- ? 小鵬與廣州天河區(qū)簽約,布局行業(yè)首個(gè)人形機(jī)器人全鏈條量產(chǎn)基地
- ? 榮耀首款人形機(jī)器人亮相
- ? 銀河通用再融資 25 億元,估值繼續(xù)領(lǐng)跑具身智能首位
- ? 搶占未來(lái)產(chǎn)業(yè)先機(jī)!法奧機(jī)器人總部基地開(kāi)工
- ? 人形機(jī)器人“春節(jié)檔”吸睛 技術(shù)進(jìn)化折射產(chǎn)業(yè)新機(jī)
- ? 新松機(jī)器人亮相央視非遺晚會(huì),“巨臂”力擎千年苗鼓驚艷全國(guó)
- ? 從春晚到影院 越疆機(jī)器人讓具身智能“用起來(lái)”
- ? “鏈”就未來(lái):深圳機(jī)器人產(chǎn)業(yè)集群百舸爭(zhēng)流
編輯精選
- ? 賦能綠色智造 臺(tái)達(dá)與長(zhǎng)三角制造企業(yè)探討智造新路徑
- ? 2025 年伺服電機(jī)行業(yè)產(chǎn)業(yè)布局深度解析
- ? HMS行業(yè)洞察:2025工業(yè)網(wǎng)絡(luò)市場(chǎng)全景解讀
- ? 總投資15億元!ABB超級(jí)工廠落子南京
- ? 構(gòu)筑工業(yè) AI 時(shí)代的數(shù)據(jù)底座,藍(lán)卓supOS X工廠操作系統(tǒng)全球首發(fā)
- ? CC-Link協(xié)議家族與會(huì)員單位集中亮相,共話行業(yè)新發(fā)展
- ? 2025 工業(yè)操作系統(tǒng)大會(huì)在蘇州隆重開(kāi)幕
- ? 創(chuàng)新、落地、增效:施耐德電氣以AI賦能產(chǎn)業(yè)新生態(tài)
- ? 西門(mén)子2026 年數(shù)字化程度展望
- ? 國(guó)家統(tǒng)計(jì)局:11月工業(yè)機(jī)器人產(chǎn)量增長(zhǎng)超20%
工控原創(chuàng)
- ? 營(yíng)收首破400億歐元大關(guān) 施耐德電氣2025財(cái)年交出強(qiáng)勁業(yè)績(jī)
- ? 高效電機(jī)市場(chǎng)強(qiáng)勁復(fù)蘇,2030年規(guī)模預(yù)計(jì)翻番至31億美元
- ? 美的剝離伺服資產(chǎn),聚焦核心部件突圍
- ? 六十載創(chuàng)新積淀,ADI開(kāi)啟邊緣智能新篇章
- ? “不擁抱就下崗”!朱興明定調(diào)匯川技術(shù)2026年:全員AI化
- ? 1 月工業(yè)自動(dòng)化月度盤(pán)點(diǎn):政策賦能 + 技術(shù)突破,開(kāi)啟智能制造新征程
- ? 匯川技術(shù)籌劃赴港上市,加速國(guó)際化戰(zhàn)略落地
- ? 23家新工廠躋身全球燈塔網(wǎng)絡(luò) 制造業(yè)智能化轉(zhuǎn)型加速
- ? 人形機(jī)器人規(guī)模化落地啟幕?樂(lè)聚 Taskor 打響行業(yè)第一槍
- ? “人工智能+制造”怎么推進(jìn)?工信部等八部門(mén)印發(fā)專項(xiàng)行動(dòng)實(shí)施意見(jiàn)


