
通過深度學(xué)習(xí)技術(shù)提升立體深度估計(jì)
http://www.kblhh.cn 2025-09-08 16:25 來源:TELEDYNE
概述
立體深度估計(jì)在機(jī)器人技術(shù)、AR/VR和工業(yè)檢測中至關(guān)重要,它為諸如箱體拾取、自動導(dǎo)航和質(zhì)量控制等任務(wù)提供了精確的3D感知。Teledyne IIS的Bumblebee X立體相機(jī)既具備高精度,又能夠提供實(shí)時性能,能夠在1024×768分辨率下以38幀每秒(FPS)的速度生成詳細(xì)的視差圖。
Bumblebee X基于半全局塊匹配(SGBM)算法,在紋理豐富的場景中表現(xiàn)穩(wěn)定。然而,像許多傳統(tǒng)立體方法一樣,在低紋理或反射表面上,特別是沒有圖像投影儀的情況下,Bumblebee X可能會出現(xiàn)視差缺失或深度數(shù)據(jù)不完整的情況。
近期,深度學(xué)習(xí)(DL)技術(shù)的進(jìn)展為提高視差精度、準(zhǔn)確性和完整性提供了有力的解決方案。本文將通過實(shí)際測試,探討這些方法的優(yōu)勢、局限性,并分析它們在嵌入式系統(tǒng)中的適用性。
在評估這些方法之前,我們首先需要了解傳統(tǒng)立體技術(shù)所面臨的實(shí)際挑戰(zhàn)。
立體深度估計(jì):挑戰(zhàn)與局限性
傳統(tǒng)的立體算法,如內(nèi)置SGBM,提供了快速高效的視差估計(jì),非常適合嵌入式和實(shí)時應(yīng)用。這些方法在表面紋理良好的場景中表現(xiàn)穩(wěn)定,不需要GPU加速或訓(xùn)練數(shù)據(jù)。
然而,在更復(fù)雜的環(huán)境中,尤其是具有反射或低紋理表面的場景中,它們可能會生成不完整或不準(zhǔn)確的深度圖。
以下的倉庫場景說明了這些挑戰(zhàn)。長且重復(fù)的貨架減少了視差線索,而光滑的環(huán)氧地板反射了周圍光線,頂燈的鏡面高光則引入了匹配錯誤。
場景左右兩側(cè)出現(xiàn)空白區(qū)域是因?yàn)镾GBM算法的MinDisparity被設(shè)置為0,并結(jié)合256級視差范圍,導(dǎo)致系統(tǒng)無法測量超出可測深度窗口的物體,特別是距離大約1.6米以內(nèi)的物體。為了捕捉這些近場物體,用戶可以選擇增加最小視差值(Scan3D坐標(biāo)偏移)或切換到四分之一分辨率模式。
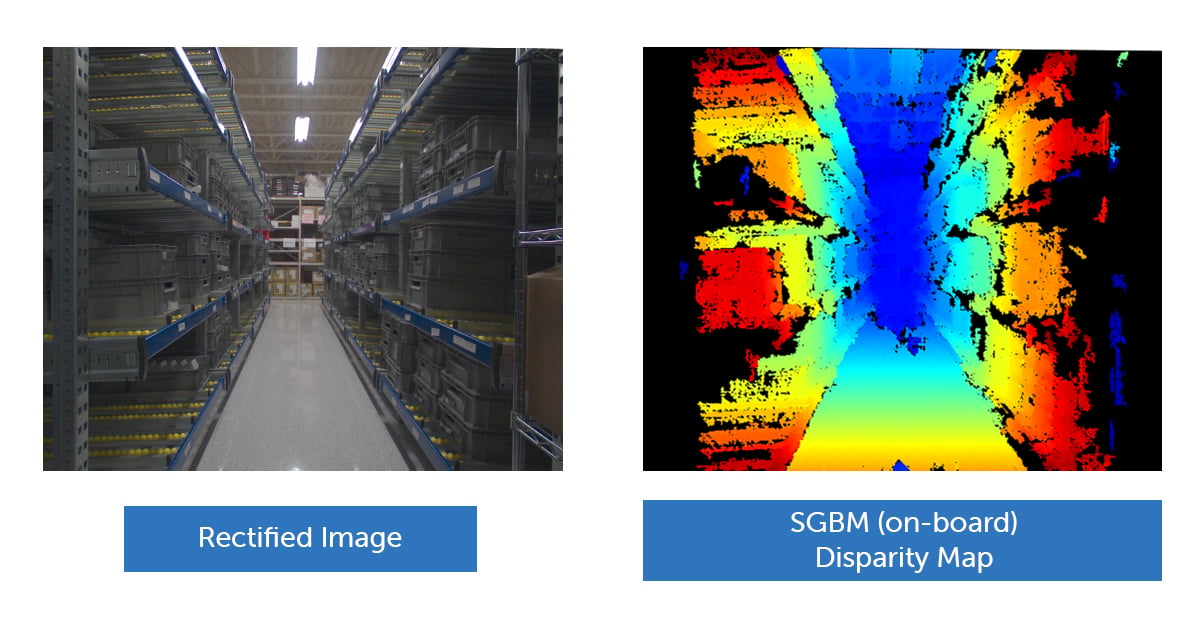
如以上視差圖像所示,SGBM在內(nèi)置視差引擎方面的缺陷十分明顯。
為了解決這些問題,在立體視覺應(yīng)用中常用兩種互補(bǔ)的深度學(xué)習(xí)方法:
混合深度學(xué)習(xí)方法:
這種方法通過輕量化神經(jīng)網(wǎng)絡(luò)模型增強(qiáng)SGBM生成的初始視差圖。CVLAB-Unibo的神經(jīng)視差細(xì)化模型就是一個例子,通過利用空間和顏色線索來提高深度完整性,減少匹配偽影。作為一種混合方法,它在提高精度的同時保持了計(jì)算效率,特別適合實(shí)時或嵌入式系統(tǒng)。
端到端深度學(xué)習(xí)方法:
這種方法采用端到端的深度學(xué)習(xí)模型(如 Selective-Stereo 和 FoundationStereo),直接從立體圖像對中計(jì)算視差,而不依賴傳統(tǒng)的SGBM算法。這些網(wǎng)絡(luò)從大規(guī)模數(shù)據(jù)集中學(xué)習(xí)語義和上下文特征,使其即使在復(fù)雜的場景中(如遮擋或反射表面)也能生成密集、準(zhǔn)確的視差圖。這一方法的缺點(diǎn)是對GPU要求較高,因此可能限制其在實(shí)時或資源受限環(huán)境中的使用。
接下來的章節(jié)將深入分析每種方法,評估它們在實(shí)際場景中的精度、運(yùn)行表現(xiàn)和覆蓋效果。
混合深度學(xué)習(xí)方法(神經(jīng)視差細(xì)化模型)
方法描述
CVLAB-Unibo的神經(jīng)視差細(xì)化方法通過傳統(tǒng)方法(如SGBM)提升生成的現(xiàn)有視差圖質(zhì)量。該方法使用帶有VGG-13骨架的深度卷積神經(jīng)網(wǎng)絡(luò)(CNN),并采用U-Net架構(gòu),旨在:
根據(jù)空間和色彩一致性填補(bǔ)視差空白
通過學(xué)習(xí)的空間背景信息銳化邊緣
減少常見的立體匹配偽影,如條紋
網(wǎng)絡(luò)架構(gòu)
神經(jīng)細(xì)化網(wǎng)絡(luò)處理兩個輸入:
來自立體相機(jī)的左側(cè)RGB圖像
Bumblebee X生成的原始視差圖
U-Net架構(gòu)利用跳躍連接有效地將粗略的視差估計(jì)與來自RGB輸入的細(xì)節(jié)融合,顯著提高深度圖的完整性。
性能
NVIDIA RTX 3060 GPU上神經(jīng)視差細(xì)化的推理速度約為3FPS,適用于異步實(shí)時增強(qiáng)。
在同一個倉庫場景中,我們通過將從內(nèi)置視差引擎獲得的輸出與左側(cè)校正圖像一起輸入到神經(jīng)視差細(xì)化模型中,以優(yōu)化視差。結(jié)果如下所示:
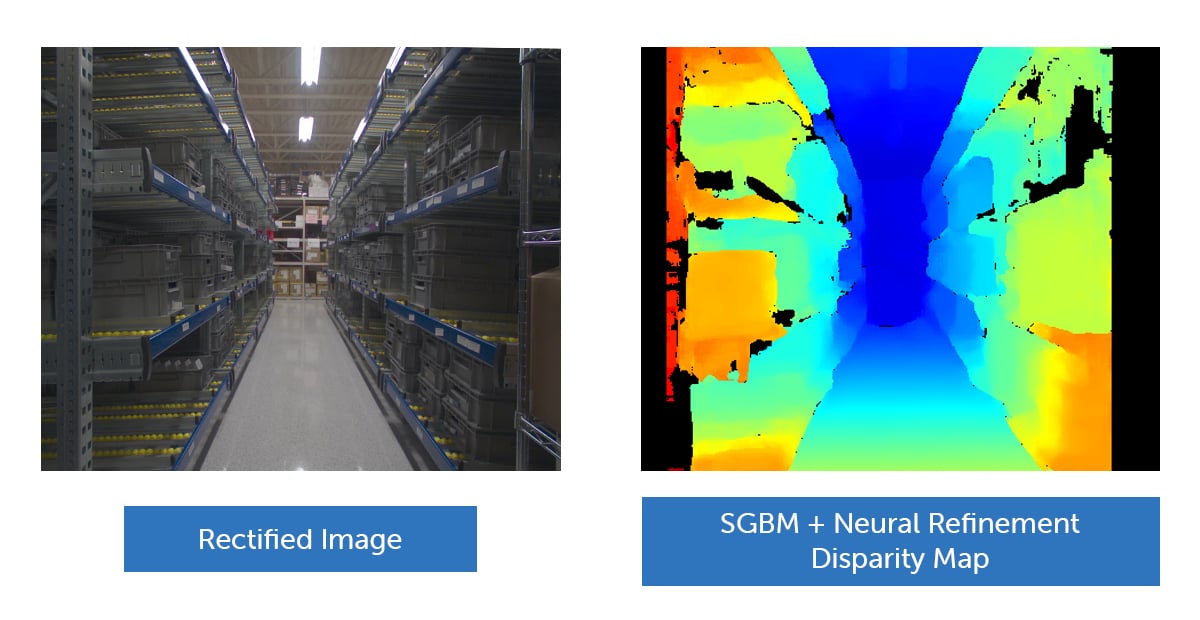
從視差圖像中可以看出,應(yīng)用該網(wǎng)絡(luò)后,倉庫場景中的空洞減少,地面匹配誤差也得到了修正。然而,由于細(xì)化依賴于SGBM的先驗(yàn)數(shù)據(jù),在SGBM沒有數(shù)據(jù)的區(qū)域(如場景的左右邊緣),仍然可以觀察到一些空洞。
若要重現(xiàn)這些結(jié)果,請?jiān)L問GitHub上的深度學(xué)習(xí)示例。
端到端深度學(xué)習(xí)方法(Selective-Stereo)
方法描述
Selective-Stereo和Foundation-Stereo是兩種先進(jìn)的深度學(xué)習(xí)框架,直接從立體圖像對計(jì)算視差圖,無需依賴傳統(tǒng)的匹配算法(如SGBM)。它們在架構(gòu)中采用了自適應(yīng)頻率選擇,將高頻邊緣與低頻平滑區(qū)域區(qū)分開,從而優(yōu)化了不同區(qū)域的處理。
網(wǎng)絡(luò)架構(gòu)
Selective-Stereo基于IGEV-Stereo架構(gòu),并結(jié)合門控遞歸單元(GRU)進(jìn)行迭代細(xì)化。該方法根據(jù)圖像頻率特征動態(tài)調(diào)整計(jì)算重點(diǎn):
高頻分支增強(qiáng)邊緣和細(xì)節(jié)
低頻分支維持平滑區(qū)域輪廓并避免過擬合
性能
盡管這種方法具有高精度和完整性,但計(jì)算量大,基于NVIDIA RTX 3060 GPU的幀率約為0.5FPS。
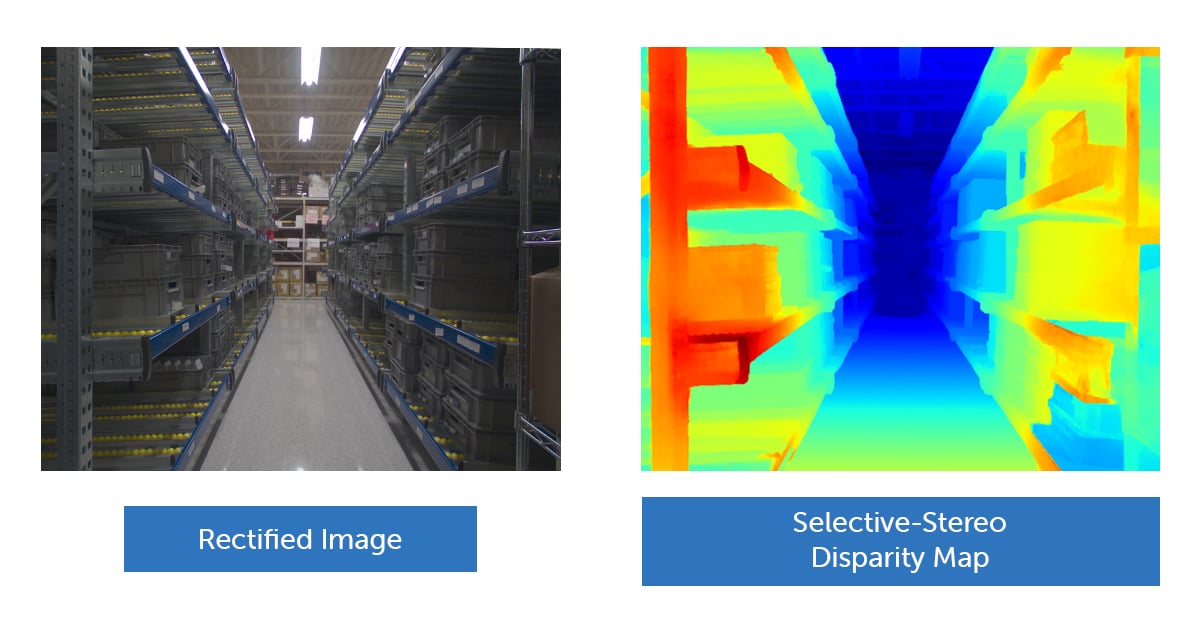
基于以下所示結(jié)果,端到端深度學(xué)習(xí)方法提供了較為廣泛的視差覆蓋范圍,并且能保持精細(xì)的結(jié)構(gòu)細(xì)節(jié):例如,清晰渲染的天花板燈具,同時避免了由燈具反射引起的斑點(diǎn)偽影。
總體而言,完全端到端的視差估計(jì)網(wǎng)絡(luò)在視差覆蓋和結(jié)構(gòu)細(xì)節(jié)保留方面優(yōu)于原始內(nèi)置SGBM輸出和神經(jīng)細(xì)化系統(tǒng)流程,盡管其運(yùn)行時間較長,且對更強(qiáng)大的GPU有一定要求。
若要重現(xiàn)這些結(jié)果,請?jiān)L問GitHub上的深度學(xué)習(xí)示例。
其他考慮因素
與內(nèi)置視差結(jié)果類似,距離小于1.6米的表面(超出0-256視差范圍)無法準(zhǔn)確處理。右下角的儲物箱就展示了這一問題:由于它距離相機(jī)非常近,應(yīng)該位于極紅范圍內(nèi),但網(wǎng)絡(luò)為其分配了較小的視差,導(dǎo)致其被置于比實(shí)際更遠(yuǎn)的位置。這種局部誤差會破壞深度圖,在該區(qū)域生成不準(zhǔn)確的點(diǎn)云。
某些深度學(xué)習(xí)模型提供了調(diào)整最小視差的選項(xiàng),從而正確捕捉近距離物體,而其他模型則不支持此功能。如果所選的深度學(xué)習(xí)模型不允許調(diào)整最小視差,可以將右圖像向左平移所需的最小視差像素,再將該值加回每個輸出視差中。
另外,有些深度學(xué)習(xí)模型會限制其操作的視差范圍。在這種情況下,需要調(diào)整輸入的校正圖像大小,以適應(yīng)相同的可測深度范圍,但這會犧牲一些深度精度。
許多深度學(xué)習(xí)模型還需要根據(jù)特定場景進(jìn)行微調(diào)(盡管高級的“基礎(chǔ)”立體網(wǎng)絡(luò)可以實(shí)現(xiàn)零樣本泛化),而SGBM和基于SGBM的混合模型則無需任何調(diào)優(yōu),并能在各種場景中提供可靠的即用型性能。
比較實(shí)驗(yàn)分析
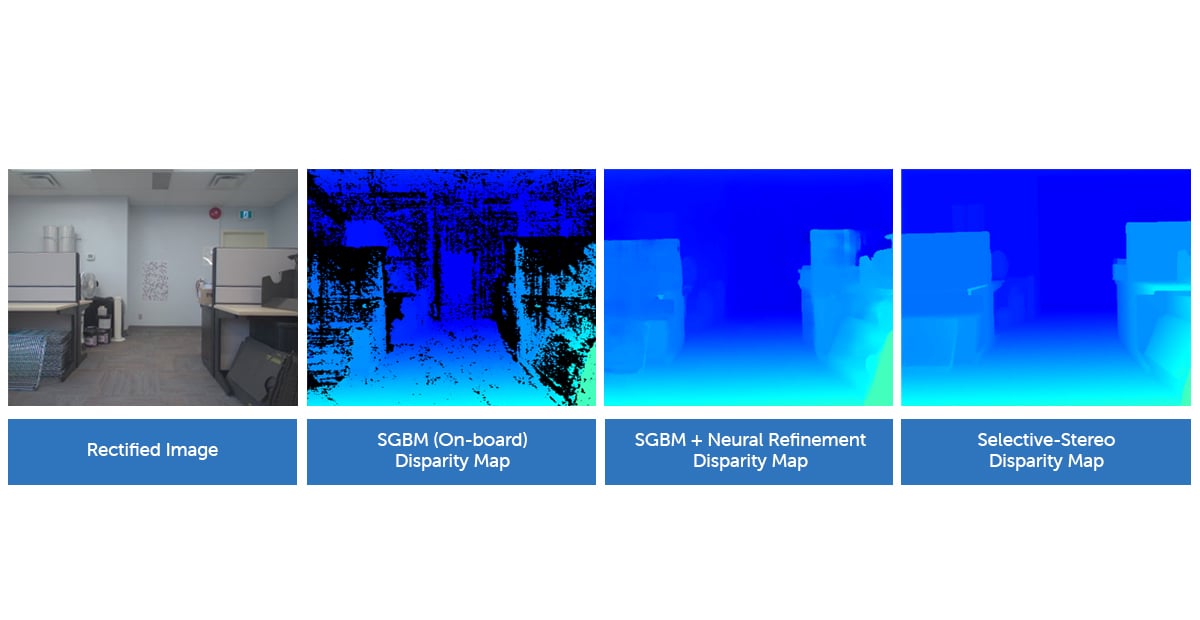
我們使用已知距離為5米的隨機(jī)圖案進(jìn)行了實(shí)驗(yàn)基準(zhǔn)測試。相機(jī)以1024×768分辨率(四分之一模式)運(yùn)行。在精度測試中,定義了感興趣區(qū)域(ROI),確保它完全位于紋理清晰的圖案部分,只有明確定義的特征才會影響深度統(tǒng)計(jì)。覆蓋評估分為兩個階段:首先評估紋理區(qū)域,然后評估相鄰的無紋理光滑白色表面。下圖展示了所得到的視差圖。
測試結(jié)果包括:
|
|
有紋理區(qū)域的覆蓋率(%) |
無紋理區(qū)域的覆蓋率(%) |
中值深度(m) |
中值誤差(m) |
中值誤差(%) |
幀率(FPS) |
SGBM (板載) |
100.00 |
18.48 |
5.052 |
0.052 |
1.03 |
38 |
SGBM + 神經(jīng)網(wǎng)絡(luò)精化 (Neural Refinement) |
100.00 |
100.00 |
5.058 |
0.058 |
1.17 |
3 |
Selective-Stereo |
100.00 |
100.00 |
4.988 |
-0.012 |
-0.24 |
0.5 |
觀察結(jié)果:
神經(jīng)細(xì)化方法顯著提高了視差的完整性,略微增加了中間誤差。
Selective-Stereo提供了出色的完整性和較小的偏差,表明其在精度要求較高的應(yīng)用中表現(xiàn)良好。
實(shí)際應(yīng)用指南
針對特定應(yīng)用場景的建議:
高速實(shí)時應(yīng)用(≥30FPS):使用Bumblebee X內(nèi)置的SGBM算法,必要時結(jié)合圖案投影儀,以提高完整性。
平衡覆蓋與延遲:將神經(jīng)視差細(xì)化與內(nèi)置SGBM異步結(jié)合,增強(qiáng)覆蓋范圍。
出色精度與完整性:當(dāng)?shù)蛶士山邮芮腋呔戎陵P(guān)重要時,選擇Selective-Stereo。
結(jié)論
深度學(xué)習(xí)方法在復(fù)雜環(huán)境中顯著提升了Bumblebee X內(nèi)置SGBM的表現(xiàn)。輕量級細(xì)化方法能夠在普通硬件上進(jìn)行實(shí)時改善,而端到端網(wǎng)絡(luò)則在速度要求較低時提供更高的質(zhì)量。與許多受限于固定系統(tǒng)流暢或缺乏內(nèi)置處理的立體相機(jī)不同,Bumblebee X同時支持這兩種方法,賦予用戶在精度、速度和計(jì)算能力之間優(yōu)化的靈活性,適用于各種應(yīng)用場景。
相關(guān)新聞
- ? 為什么 Imajing 更傾向于使用 Teledyne 的球形成像相機(jī)進(jìn)行 360 ° 移動測繪
- ? Teledyne 擴(kuò)展 Blackfly S GigE 產(chǎn)品線,推出 500 萬像素卷簾快門相機(jī)
- ? 為運(yùn)動注入智能:結(jié)合 AI、立體視覺與邊緣計(jì)算
- ? Teledyne推出 Z-Trak Express 1K5,實(shí)現(xiàn)經(jīng)濟(jì)高效的在線3D測量和檢測
- ? Teledyne Space Imaging 發(fā)布通過航天級篩選的工業(yè)圖像傳感器
- ? 如何通過智能軟件和硬件解決方案克服實(shí)時立體視覺中的挑戰(zhàn)
- ? Teledyne的新款2.5 GigE Vision線掃相機(jī),為用戶提供高性能、高性價比解決方案
- ? Teledyne e2v推出新型高速傳感器,拓展近紅外波長下的靈敏度
- ? Teledyne推出用于在線3D測量和檢測的Z-Trak 3D Apps Studio軟件工具
- ? Teledyne將于Vision China 2024 (上海)展示最新成像解決方案
編輯精選
- ? 賦能綠色智造 臺達(dá)與長三角制造企業(yè)探討智造新路徑
- ? 2025 年伺服電機(jī)行業(yè)產(chǎn)業(yè)布局深度解析
- ? HMS行業(yè)洞察:2025工業(yè)網(wǎng)絡(luò)市場全景解讀
- ? 總投資15億元!ABB超級工廠落子南京
- ? 構(gòu)筑工業(yè) AI 時代的數(shù)據(jù)底座,藍(lán)卓supOS X工廠操作系統(tǒng)全球首發(fā)
- ? CC-Link協(xié)議家族與會員單位集中亮相,共話行業(yè)新發(fā)展
- ? 2025 工業(yè)操作系統(tǒng)大會在蘇州隆重開幕
- ? 創(chuàng)新、落地、增效:施耐德電氣以AI賦能產(chǎn)業(yè)新生態(tài)
- ? 西門子2026 年數(shù)字化程度展望
- ? 國家統(tǒng)計(jì)局:11月工業(yè)機(jī)器人產(chǎn)量增長超20%
工控原創(chuàng)
- ? 營收首破400億歐元大關(guān) 施耐德電氣2025財(cái)年交出強(qiáng)勁業(yè)績
- ? 高效電機(jī)市場強(qiáng)勁復(fù)蘇,2030年規(guī)模預(yù)計(jì)翻番至31億美元
- ? 美的剝離伺服資產(chǎn),聚焦核心部件突圍
- ? 六十載創(chuàng)新積淀,ADI開啟邊緣智能新篇章
- ? “不擁抱就下崗”!朱興明定調(diào)匯川技術(shù)2026年:全員AI化
- ? 1 月工業(yè)自動化月度盤點(diǎn):政策賦能 + 技術(shù)突破,開啟智能制造新征程
- ? 匯川技術(shù)籌劃赴港上市,加速國際化戰(zhàn)略落地
- ? 23家新工廠躋身全球燈塔網(wǎng)絡(luò) 制造業(yè)智能化轉(zhuǎn)型加速
- ? 人形機(jī)器人規(guī)模化落地啟幕?樂聚 Taskor 打響行業(yè)第一槍
- ? “人工智能+制造”怎么推進(jìn)?工信部等八部門印發(fā)專項(xiàng)行動實(shí)施意見


