
當(dāng)國(guó)產(chǎn)芯遇上機(jī)器人:米爾RK3576開發(fā)板的ROS2奇幻之旅
米爾RK3576開發(fā)板成功上車!ROS2 Humble生態(tài)系統(tǒng)體驗(yàn)
http://www.kblhh.cn 2026-01-15 15:25 來(lái)源:米爾電子
當(dāng)RK3576的強(qiáng)勁“大腦”(四核A72+四核A53)與強(qiáng)大的GPU、VPU、NPU加速模塊相遇,一場(chǎng)高性價(jià)比的機(jī)器人開發(fā)革命正在悄然發(fā)生。我們成功將完整的Ubuntu 22.04與ROS2 Humble生態(tài)系統(tǒng),完美移植到了這顆國(guó)產(chǎn)芯片上。一個(gè)穩(wěn)定、全功能的機(jī)器人軟件開發(fā)平臺(tái)已經(jīng)就緒,現(xiàn)在就來(lái)一起探索它的強(qiáng)大魅力!

一、系統(tǒng)啟動(dòng)與基礎(chǔ)性能展示
1. 硬件平臺(tái)簡(jiǎn)介
- 開發(fā)板:MYD-LR3576
- 存儲(chǔ):eMMC 64GB
- 內(nèi)存:8GB LPDDR4
- 登錄信息:root/123456 或 myir/123456
2. 系統(tǒng)基本信息
- 版本:Ubuntu 22.04.5 LTS
- 啟動(dòng)速度:HDMI 3秒顯示Logo,25秒進(jìn)入桌面
3. 資源占用實(shí)測(cè)
磁盤使用情況:
Filesystem Size Used Avail Use% Mounted on
/dev/root 57G 13G 42G 23% /
內(nèi)存狀態(tài):
Mem: 7.7Gi total, 760Mi used, 6.4Gi free
CPU負(fù)載情況:
8核CPU在空閑狀態(tài)下利用率接近0%,系統(tǒng)響應(yīng)迅速。
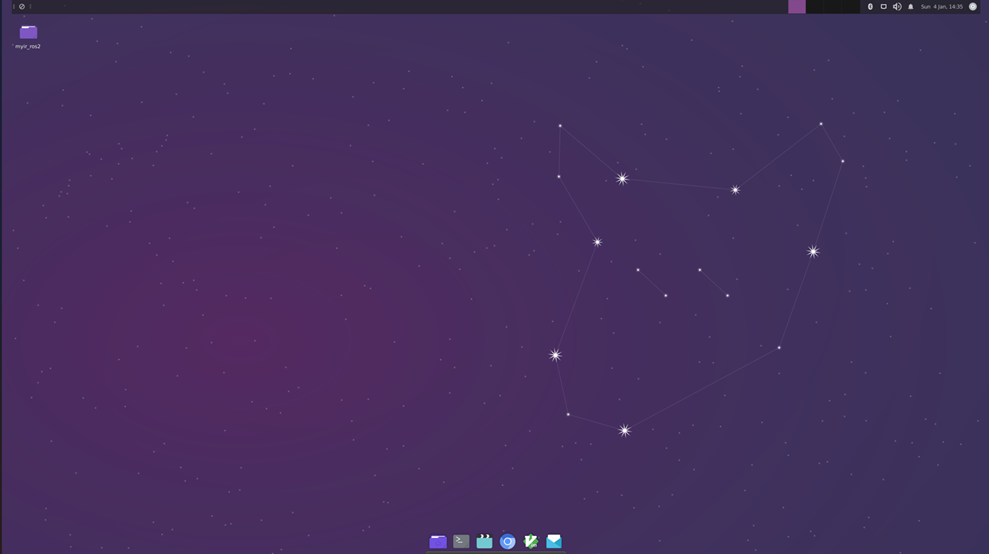
4. 桌面環(huán)境展示
默認(rèn)搭載輕量級(jí)Xfce4桌面,簡(jiǎn)潔流暢。
5.系統(tǒng)功能介紹
|
功能 |
描述 |
支持情況 |
|
調(diào)試工具 |
Debug串口、adb、ssh |
完全支持 |
|
瀏覽器 |
支持GPU/VPU硬件加速 |
默認(rèn)支持 |
|
網(wǎng)絡(luò)連接 |
以太網(wǎng)、WiFi、藍(lán)牙 |
桌面可控 |
|
多媒體 |
VPU硬解視頻播放 |
流暢支持 |
|
AI能力 |
NPU推理,支持RKNN模型 |
默認(rèn)支持 |
|
容器化 |
Docker引擎 |
開箱即用 |
二、ROS2核心功能測(cè)試
1. 環(huán)境驗(yàn)證
ROS_VERSION=2
ROS_DISTRO=humble
ROS_PYTHON_VERSION=3
確認(rèn)運(yùn)行ROS2 Humble長(zhǎng)期支持版,生態(tài)完整。
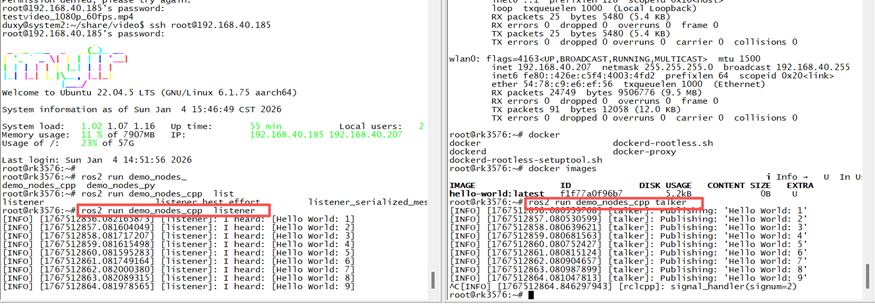
2. 通信測(cè)試
話題發(fā)布/訂閱:C++與Python節(jié)點(diǎn)通信正常,跨終端交互流暢。
- 使用C++演示
左邊窗口ssh登陸,訂閱模式; 右邊窗口debug連接,話題發(fā)布
- 使用Python演示

3. 性能表現(xiàn)
root@rk3576:~# ros2 topic hz /chatter
average rate: 1.001
min: 0.999s max: 0.999s std dev: 0.00018s window: 3
average rate: 1.001
min: 0.999s max: 1.000s std dev: 0.00021s window: 5
average rate: 1.001
min: 0.999s max: 1.000s std dev: 0.00021s window: 7
average rate: 1.001
min: 0.999s max: 1.000s std dev: 0.00027s window: 9
average rate: 1.001
min: 0.999s max: 1.000s std dev: 0.00029s window: 11
average rate: 1.001
min: 0.999s max: 1.000s std dev: 0.00029s window: 13
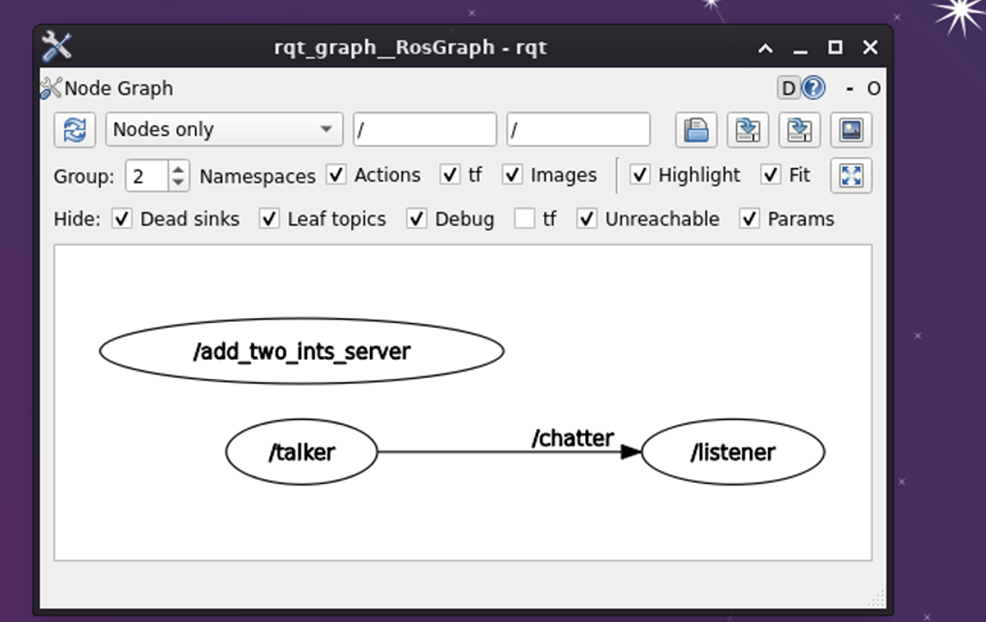
4. 可視化工具
rqt_graph:清晰展示節(jié)點(diǎn)拓?fù)洌到y(tǒng)架構(gòu)一目了然。
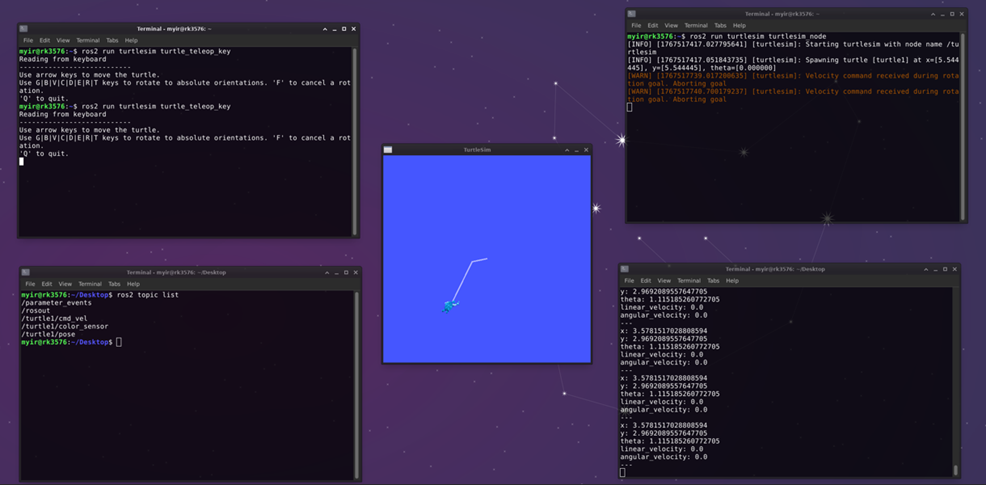
6.小烏龜-Turtlesim經(jīng)典演示
終端1 啟動(dòng)”小烏龜”
ros2 run turtlesim turtlesim_node
終端2 開啟 鍵盤控制
ros2 run turtlesim turtle_teleop_key
終端3 開啟查看活躍話題
ros2 topic list
終端4 查看烏龜實(shí)時(shí)位置
ros2 topic echo /turtle1/pose
三、RVIZ2三維可視化實(shí)戰(zhàn)
1. 啟動(dòng)與界面
啟動(dòng)命令
Ros2 run rviz2 rviz2
界面
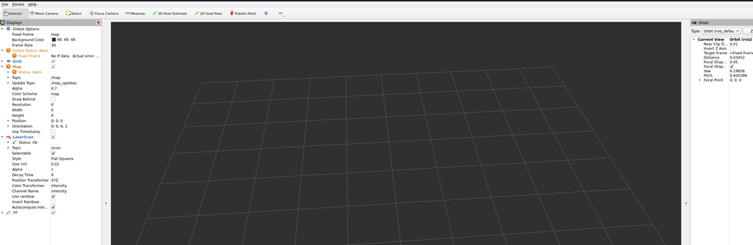
成功啟動(dòng)RVIZ2,界面加載完整,支持3D可視化交互。
2. 機(jī)器人模型加載
apt install ros-humble-urdf-tutorial
ros2 launch urdf_tutorial display.launch.py model:=urdf/01-myfirst.urdf
3. 性能實(shí)測(cè)
- 2K分辨率全屏:CPU占用約60%
- GPU負(fù)載:36%@700MHz
- 渲染體驗(yàn):操作流暢,視角切換無(wú)卡頓
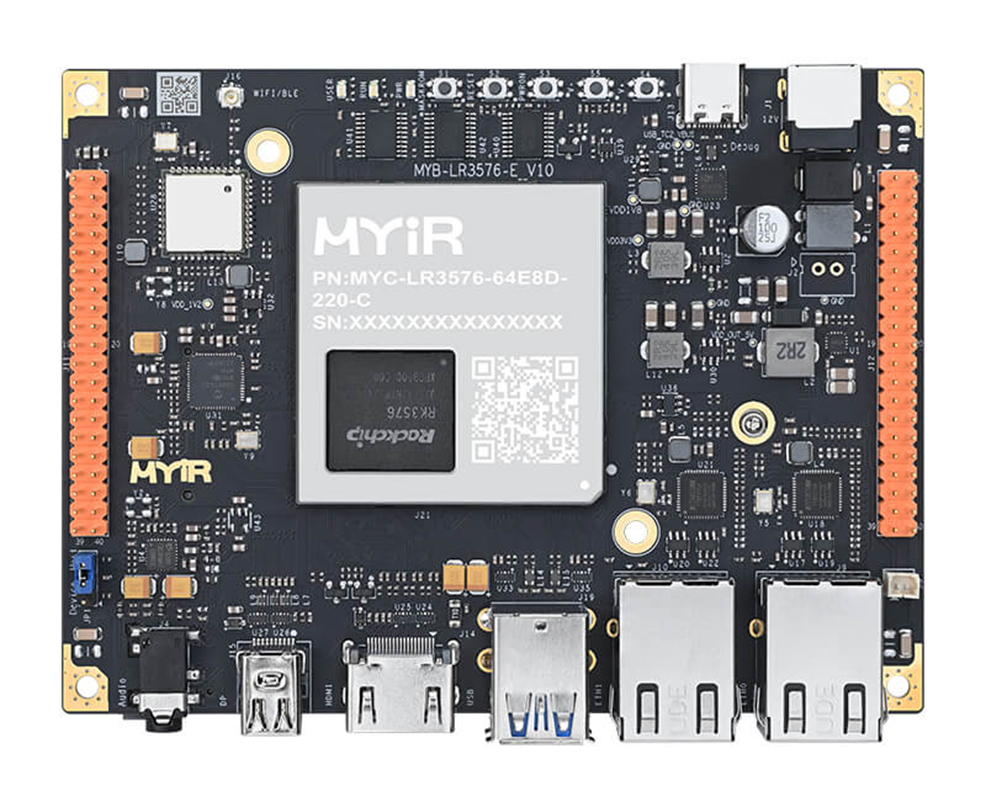
圖:米爾基于RK3576開發(fā)板
四、總結(jié)與展望
RK3576平臺(tái)完全具備運(yùn)行完整ROS2生態(tài)的能力,性能滿足:
- 機(jī)器人算法開發(fā)與調(diào)試
- 三維可視化與仿真
- 多傳感器數(shù)據(jù)融合處理
- 教育實(shí)驗(yàn)與原型驗(yàn)證
🚀 核心優(yōu)勢(shì)
- 國(guó)產(chǎn)化價(jià)值:全鏈路自主可控,助力機(jī)器人領(lǐng)域國(guó)產(chǎn)替代
- 成本優(yōu)勢(shì):千元級(jí)開發(fā)板實(shí)現(xiàn)完整ROS2開發(fā)環(huán)境
- 功耗表現(xiàn):典型場(chǎng)景功耗優(yōu)于同性能x86平臺(tái)
- 生態(tài)完整:Ubuntu + ROS2 + 豐富外設(shè)驅(qū)動(dòng)
🔮 未來(lái)計(jì)劃
- 進(jìn)一步優(yōu)化GPU驅(qū)動(dòng),提升3D渲染性能
- 集成SLAM、導(dǎo)航等實(shí)際機(jī)器人應(yīng)用棧
- 推動(dòng)在AGV、服務(wù)機(jī)器人等場(chǎng)景的落地應(yīng)用
💡 給開發(fā)者的建議
推薦場(chǎng)景:
- 高校機(jī)器人課程教學(xué)平臺(tái)
- 機(jī)器人算法研究與原型驗(yàn)證
- 輕量級(jí)機(jī)器人產(chǎn)品開發(fā)
注意事項(xiàng):
- 建議使用SSD或高速TF卡提升IO性能
- 復(fù)雜3D場(chǎng)景可適當(dāng)降低渲染質(zhì)量
- 多節(jié)點(diǎn)應(yīng)用注意內(nèi)存分配優(yōu)化
相關(guān)新聞
- ? 內(nèi)置全棧安全,一站式滿足CRA法案與IEC 62443標(biāo)準(zhǔn)——米爾STM32MP257核心板
- ? 新品!AMD Zynq UltraScale+ MPSoC EG異構(gòu)多處理開發(fā)平臺(tái)
- ? 新品!米爾基于全志T153四核異構(gòu)工業(yè)芯核心板,賦能多元化工業(yè)場(chǎng)景
- ? 從兩輪車儀表到工程機(jī)械環(huán)視,米爾電子助力國(guó)產(chǎn) HMI 顯控一體化突圍
- ? 【深度實(shí)戰(zhàn)】米爾RK3576開發(fā)板AMP非對(duì)稱多核開發(fā)指南:從配置到實(shí)戰(zhàn)
- ? 360環(huán)視實(shí)時(shí)性評(píng)估:GPU加速性能與AI拓展?jié)摿?基于米爾RK3576
- ? 定制未來(lái),共建生態(tài),米爾出席安路研討會(huì)
- ? 米爾SECC方案助力國(guó)標(biāo)充電樁出海
- ? 米爾RK3576邊緣計(jì)算盒精準(zhǔn)驅(qū)動(dòng)菜品識(shí)別模型性能強(qiáng)悍
- ? 米爾與安路聯(lián)合亮相VisionChina 2025,共推FPGA視覺方案
編輯精選
- ? 賦能綠色智造 臺(tái)達(dá)與長(zhǎng)三角制造企業(yè)探討智造新路徑
- ? 2025 年伺服電機(jī)行業(yè)產(chǎn)業(yè)布局深度解析
- ? HMS行業(yè)洞察:2025工業(yè)網(wǎng)絡(luò)市場(chǎng)全景解讀
- ? 總投資15億元!ABB超級(jí)工廠落子南京
- ? 構(gòu)筑工業(yè) AI 時(shí)代的數(shù)據(jù)底座,藍(lán)卓supOS X工廠操作系統(tǒng)全球首發(fā)
- ? CC-Link協(xié)議家族與會(huì)員單位集中亮相,共話行業(yè)新發(fā)展
- ? 2025 工業(yè)操作系統(tǒng)大會(huì)在蘇州隆重開幕
- ? 創(chuàng)新、落地、增效:施耐德電氣以AI賦能產(chǎn)業(yè)新生態(tài)
- ? 西門子2026 年數(shù)字化程度展望
- ? 國(guó)家統(tǒng)計(jì)局:11月工業(yè)機(jī)器人產(chǎn)量增長(zhǎng)超20%
工控原創(chuàng)
- ? 營(yíng)收首破400億歐元大關(guān) 施耐德電氣2025財(cái)年交出強(qiáng)勁業(yè)績(jī)
- ? 高效電機(jī)市場(chǎng)強(qiáng)勁復(fù)蘇,2030年規(guī)模預(yù)計(jì)翻番至31億美元
- ? 美的剝離伺服資產(chǎn),聚焦核心部件突圍
- ? 六十載創(chuàng)新積淀,ADI開啟邊緣智能新篇章
- ? “不擁抱就下崗”!朱興明定調(diào)匯川技術(shù)2026年:全員AI化
- ? 1 月工業(yè)自動(dòng)化月度盤點(diǎn):政策賦能 + 技術(shù)突破,開啟智能制造新征程
- ? 匯川技術(shù)籌劃赴港上市,加速國(guó)際化戰(zhàn)略落地
- ? 23家新工廠躋身全球燈塔網(wǎng)絡(luò) 制造業(yè)智能化轉(zhuǎn)型加速
- ? 人形機(jī)器人規(guī)模化落地啟幕?樂聚 Taskor 打響行業(yè)第一槍
- ? “人工智能+制造”怎么推進(jìn)?工信部等八部門印發(fā)專項(xiàng)行動(dòng)實(shí)施意見


