
皮爾磁:工業機器人安全的核心標準ISO 10218重大修訂版
http://www.kblhh.cn 2025-10-10 16:27 來源:皮爾磁
ISO 10218系列標準是工業機器人安全的核心規范,由國際標準化組織(ISO)制定。它是全球工業機器人安全的“母標準”,也是工業機器人出口歐盟、北美、日本的藍本。該標準分為兩個部分,ISO 10218-1主要圍繞機器人本體(設計&制造),ISO 10218-2則專注于機器人集成(安裝&產線),新的修訂版本于2025年2月發布,這是自2011年該系列標準發布以來的首次重大修訂,旨在適應機器人技術的發展與進步,如人機協作(HRC)、移動平臺和網絡化系統,同時使要求更明確,以提升合規性和安全性。
2011版 VS 2025版的主要變化
兩個版本最直觀的變化是在標準頁數上,ISO 10218-1 從 50 頁增加到了 95 頁,ISO 10218-2 從 72 頁增加到了 223 頁!新版本整合了協作機器人安全規范 ISO/TS 15066:2016 中的內容,以完整體現傳統工業機器人應用和協作應用的安全規范,同時為了適應新版歐盟機械法規(2027年生效)的變化,新版標準強調了功能安全、網絡信息安全和協作應用的標準化。

機器人定義和分類擴展
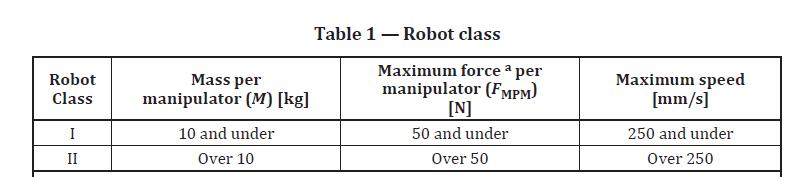
新版本引入了兩個機器人類:Class 1(適用于低負載的機器人,基于合理預見誤用設計);Class 2(適用于負載較大的機器人)。CLASS I和CLASS II機器人的分類區分標準簡述見下表。需要注意的是,機器人只要不滿足Class I中的任意一個條件,就會被歸類為Class II機器人。
從上表中可以很明顯地看到,Class I機器人無論是在最大載荷、力量還是在速度上均有很大程度上的限制,因此標準中對于兩類機器人的安全要求也存在差異,以功能安全方面為例,Class I機器人最低只要求PL b or SIL 1。
功能安全方面的要求更明確和靈活
舊版標準中許多安全功能的性能等級統一要求為Category3, PLd,而新版標準中則明確定義了安全函數(如功率與力限制 PFL、速度與分離監測 SSM、監測靜止),并允許基于風險評估的應用特定 PL 值(使用風險參數表評估嚴重性、暴露度、概率和可避免性,遵循 ALARP 原則)。除此之外,新版本標準整合了 ISO/TS 15066 的協作指南,提供完整規范基礎,包括手引導模式、碰撞測試和風險評估要求;還定義了協作模式(如PFL、SSM和手動引導),包括生物力學極限閾值和驗證協議等,減少歧義。
新增網絡和通信安全
老版本的標準中未涉及網絡和通信安全的方面,新版本則響應歐盟網絡安全法規,添加工業網絡要求,包括安全通信層和網絡類別指導,將網絡安全視為功能安全的一部分。
增強風險評估和驗證
加強集成階段的指導建議,包括特定工藝風險(如焊接產生的危害)。要求全面驗證(如模擬測試)和維護文檔,涵蓋調試至拆除。
關于目前最熱門的人形機器人,雖然新版的標準中加入了固定在移動平臺上的機器人(如位于AGV上的復合機器人),但不覆蓋機器人移動過程中的風險,因此類似如人形機器人的行進過程中的風險仍然需要由其他標準(如ISO 3691-4)處理。
行動清單
1設計部門:把Class分類表貼進立項文檔,越早算清成本越省
2認證部門:2025版證書模板已更新,舊報告2027年起失效,提前排期換新
3采購部門:關注網絡安全芯片、加密固件等產品的價格
4銷售部門:把“已按2025版標準設計“寫進方案,歐洲客戶一眼識貨
皮爾磁PILZ是機器人安全應用方面的專家,擁有成熟的機器人安全應用的解決方案,不僅包括硬件的產品,如安全傳感器、安全控制器等,還包括風險評估、碰撞測試等專業服務,憑借對標準的精準把握,幫助用戶實現安全的機器人應用。
編輯精選


