����-�e��-�ֿ�������������ƽ�60�����Ժ��Ա����������ڹ��I�^�̿����е�������λ��
����
������18���o�ԁ���ؓ����һֱ�������B�m�^�̿��ơ�James Watt�����w���{�����������������������C���\�D�ٶȣ��������C�ٶȽ���̫�͕r�����w���{�������Ԅ����������������ٶ�����̫�ߕr�t���w���{������p��������
�����@�N���ε�ƽ����������ˮ����^�̿��Ƶ�һЩ�������ܼ����y���^��׃�������O���c�Ϝpȥ׃���ԫ@���`��Լ����`������r�\�ÿ����������^��׃�����ӻ����`���ؓ�r���^��׃���p�٣��@�N�^���؏��M��ֱ���`��������
�����������OӋ�еľ���֮̎����Ӌ���ÿ�N��r�¿����������^��ʩ�Ӷ���У����������������ֻ�Ǻ��ε،��`�����һ��������Ӌ��������һ��ݔ������Watt�OӋ���w���{�������t�Ǹ������O��γߴ缰���{�̶��ݽzλ�����_���ij���,���ԙCе��ʽ������@�N���ơ�
���������ҵ��ǣ����������������^��׃�����ӽ��O���c�r�������˳���������ͣ����һ��ʹ�`���С���s�����ֵ�Ĺ̶�ݔ���ϡ����P�˷N���B�`��F��ĸ�Ԕ����ጣ�Ո��ҊCONTROL ENGINEERING 2000��6�¿����˽�PID���ơ�һ�ġ� �����e������
����20���o30����Ŀ��ƹ��̎����l�F���`���ͨ�^�Ԅӌ��O���c���O��һ���˞��ֵ��������ȫ�������@һ��������������������һ���˹��O���c���Ķ�ʹ���H�`���ڿ�����ֹͣ�����r���㣬�@���H�����ڌ��H�`�����r��ͨ�^�����������ͣ�ԓ�˹��O���c��ʹ�`����㡣
�������l���r���@�N�Ԅ����O�������ڌ��`��e�֡�����ȫ�����ӵ������������ݔ���ж��ԣ��ڔ��W�Ͼ���ͬ�ӵ�Ч������Y������һ�N���^�m�����`������ݔ����ֱ���`����ȫ�����ġ������e�֡���PI����������
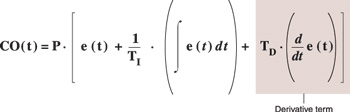 �����D1�����y��PID��ʽͨ�^���`����̖�M���ց�Ӌ����헣�e(t) = SP(t) - PV(t)������PV(t)��t�r�̵��^��׃����SP(t)���O��ֵ��CO(t)���������ȫ��ݔ����P��TI��TD �t�քe�鶨�x�������e�ּ���헵ġ�������������
���������ҵ��ǣ��e�����ò����ܱ��C���F�����ķ������ơ�����e�������^�����tPI�������������� ���]�h������������ҊCONTROL ENGINEERING 2000��5�¿� ��������������]�h�����ԁ�ƽ�����ܡ�һ�ģ���������Ҳ���܌��`���M�С��^У�������Ķ������µġ���������ķ����`����l���@�N��r�r����������K���ڡ���ȫ�_��������ȫ�P��֮�g��������ݔ�������_ʼ���F���^�ġ���ʎ���F��
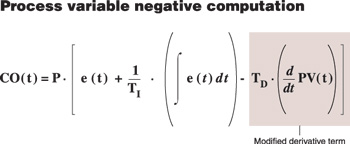 �����D2���ڴ����У�����O���c�H�Բ��M�ķ�ʽ��׃���t�֟oՓ���Ӷ������Ǟ��㣬��˿�ͨ�^���^��׃��ؓ���L��Ӌ�������á� ����������
������ʎ�Еr��ͨ�^������̖���������Á����ԳC����ȫ������-�e��-�֡���PID���������е���헣�ֻ�����`���׃�r�������á�����O���c�鳣�����tֻ�����^��׃���_ʼ�����x�_���O���c�r�`����_ʼ��׃�����@��ǰ��Ŀ�����ʹ�^��׃���ӽ��O���c̫��r�������á���ˣ����������ṩ�Ĝp�����ÿɜp�ٮa�����{����ʎ�Ŀ����ԡ�
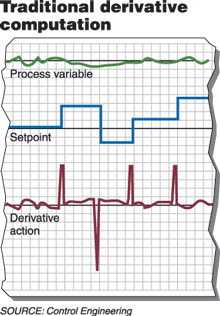 �D3��ֻҪ�O���cͻ׃�����`����̖��Ӌ����헾���������������ɼ�塣 �D3��ֻҪ�O���cͻ׃�����`����̖��Ӌ����헾���������������ɼ�塣 �������ҵ��ǣ�����������^�����t�������ڜp��̫�����������������ʎ���@�N�F����һЩ�����Ʒ����dz��`�����^�̿����У�����늙C��C���˵ȣ��Ȟ����@��
���������O���cʹ�`��l��ͻ׃�r��������Ҳڅ����ʹ������ݔ���Юa�����@�ġ���塱��ͻ���������@��ʹ�������o��ȴ��e�ֻ����������Ч���_ʼ���̲�ȡУ���Єӡ��cֻ�Ѓ�헵�PI��������ȣ�ȫPID�������������A�y���^��׃�����������O���c������������Ĵ�С�����ϣ���Tayor��˾������Fulscope�������״���ȫ����Ƴ��r��߀ֻ����험˞顰�A-���á���
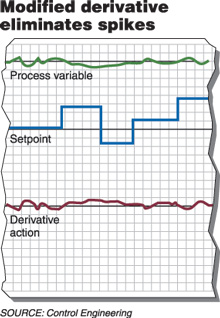 �����D4���������������헣��������O���c��׃�r�������������F�ļ�塣������O���c�ڲ��M��׃֮�g���ӣ��t�ĺ����헌��a���e�`�ĽY���� �����ֵ�ȱ��
������һ���棬�������Ą��Ҕ[�ӣ���һЩҪ�������ݔ���M�о���������׃���đ��ã������Ҝؿ��Ƶȣ���׃�÷dz����ˡ��Ԅ��{����ÿ���{�������a���ğ��L�����Hʹ���ݾ�ס�ߺܲ����������Ҳ���s�̲�ů�t������{����ʹ�É�����
�������ڴ���ã����������������������ã����ߏ�ؓ�^��׃����������ֱ�ӏ��`��Ё�Ӌ����헡�����O���c�鳣�����t�ɷNӋ��Y����ͬ������O���c�H�Բ��M��ʽ����׃���t��ÿһ���M�_ʼ�r���⣬�ɷNӋ��Y���Ԍ�һ�¡��^��׃��ؓ������ؓ�֣����������`��������ɼ�壬�P�ڴ��c��Ո��Ҋ����ƽ���������á�һ�D��Ŀǰ������F�����������ܞ齛����ͻ�����đ����ṩ����x헡�
���������Ì���һЩ�����������^��Ҫ��đ��Á��fҲ��һ�����}�����^��׃��ÿ�Μʂ��׃�r����헶�������������ݔ���a��Ӱ푡���ʹ���H���^��׃���ѽ��_���O���c��������Ҳ����߀����У��ݔ������ˣ����H�����ЬF�������������ОV���x헣��Ԟ�����ṩ����ƽ����ݔ�롣
������֮�������ñ�������ƹ��̎��J����ȱ�ݶ��ڃ��c��������ˣ���50������ڣ������ġ�����- �e��-�֡���PID���������ѳɞ�һ�N���M�ļ��g��ֱ���������Ա��������^�̿����I����������λ�����ڴ�����^�̿��Ƒ��Á��f��PID�ѽ����ʹ�ã����û��������ã����������^�����F�����������ԭ��Ҳ���ױ������⡣ ����PID�����e��
�����F���҂��ٻص��Ҝؿ������ӡ�������g�ܴ����ů�t�ֺ�С���t�^�̌��A���ڌ��������Ŀ����M�о���푑���������������_����������r�{���O���c��ʹ�^��׃��ͻȻƫ�x�O���c���tPID�������ļ��̷�����Ҫ��������헶��a�������@��ʹ��������ͻȻƫ�x����`��׃������һ�ξo��У����ͬ�r�O���c�c�^��׃��֮�g���`�����������Ԅ��{�����еı�������헡�
�������ã��S���`���S�r�g�ķe�ۣ��e���Ҳ�_ʼ����������ݔ���a�����á����ϣ��������@�N�����t�g���^�����`�����ӷdz��������ʷe������헌���K��ݔ����̖��ռ֧���λ�����ڷe���������۷e���`��������������ʹ���`���������Ԍ����^�m�a��ݔ�����˕r�^��׃���п��ܳ��^�O���c���a�������`�
��������e�����ò���̫���ң��t����a�����`�С��������`������S�����`��e����ؓ�`���������ӣ��e�����Ì��_ʼ��u׃С�����^�̌��؏͔���ֱ���`��۷e�`��������ͬ�r��������ʎ�`����̖���֣�����������헌��^�m�������ڿ�����ݔ���еķ��~���������Ҳ���S�`����̖����ʎ�����²��ӡ�
�����F�ڼ��O�^����һ���ɴ��Ͳ�ů�t�����С���g���tԓ�^�̌��A���ڌ��������Ŀ����M�п���푑����˕r�������`����ڕr�g�̣ܶ��ʷe�����Ì������ڿ�����ݔ��������Ҫ���á���һ���棬���^�̞�߶��`���r�������`����ٸ�׃���������Ì��ڿ�����ݔ��������Ҫ���á�
���������@��PID����������ʩ�ӵĿ��������S�����^�̵IJ�ͬ������׃������ˣ��M��PID�������܉���������`����΄գ���ֻ�������cÿһ����ƥ�����Õr�ſ������ø��á� ����PID����������ӛ�������
����1788�꣺James Watt���������C����w���{��������һ�N���б������������ęCе�����b�á�
����1933�꣺Tayor��˾���F�Ѳ���ABB��˾���Ƴ�56R Fulscope�Ϳ���������һ�N����ȫ���{�������������Ě��ʽ�{������
����1934-1935�꣺Foxboro ��˾�Ƴ�40�͚��ʽ�{��������һ�N�����e��ʽ��������
����1940�꣺Tayor��˾�Ƴ�Fulscope 100����һ�N�����b��һ����Ԫ�е�ȫPID���������Ě��ʽ��������
����1942�꣺Tayor ��˾�� John G. Ziegler �� Nathaniel B. Nichols ����������Ziegler-Nichols �����ʄt��
�����ڶ������������g�����ʽ PID ���������ڷ�������ŷ�ϵ�y���Լ����ںϳ����z�������麽��ȼ�ϼ���һ�wԭ�ӏ���ʹ�õ�U-235 �Ȳ��ϵ����a���ơ�
����1951�꣺Swartwout��˾���F�Ѳ���Prime Measurement Products��˾���Ƴ���Autronic�aƷϵ�У���һ�N������չܼ��g����ӿ�������
����1959�꣺Bailey Meter��˾���F�Ѳ���ABB��˾���Ƴ��ׂ�ȫ�̑B��ӿ�������
����1964�꣺Tayor��˾չʾ��һ���λ�·����ʽ����������δ�M�д������N�ۡ�
����1969�꣺Honeywell��˾�Ƴ�Vutronik�^�̿������aƷϵ�У��@�N�aƷ���Џ�ؓ�^��׃��������ֱ�ӏ��`���ρ�Ӌ��������á�
����1975�꣺Process Systems��˾���F�Ѳ���MICON Systems��˾���Ƴ�P-200�Ϳ���������һ�N����̎������PID��������
����1976�꣺Rochester Instrument systems��˾���F�Ѳ���AMETEK Power Instruments���Ƴ�Media����������һ�N���b�͔���ʽPI��PID�������aƷ��
����1980�������꣺���N�������������g�_ʼ�Ĵ�W���о��C�����I�磬�����ڸ������y�Ŀ��ƻ�·��ʹ�á��@���а����˹����ܡ����m�������Լ�ģ���A�y���Ƶȡ�
����Ո��Ҋ�P�����ġ����m�����Ƽ��g��һ�ģ��ɏ� www.controleng.com�ϵ� www.controleng.com�ϵ�
����CONTROL ENGINEERING bookstore�еõ���
|

